1.本发明属于无人机领域,涉及路径规划案技术,具体是一种面向无人机协同侦察的路径规划方法。
背景技术:
2.无线传感器网络(wsn:wireless sensor network)在环境监测、信息采集等民用和国防相关领域具有巨大的应用潜力。在侦察应用中,无线传感器网络被用于收集地面目标区域的有用侦察信息。由于能量限制且监测区域范围广,传感器收集到的数据通常无法进行长距离传输。为了解决这一问题,越来越多的人选择利用无人机作为无线传感器网络的移动信息收集器。由于无人机的高机动性和灵活部署,它们可以在执行侦察任务的过程中向传感器移动,并收集传感器所采集的信息,此种方法称为无人机协同侦察。
3.无人机路径规划问题的解决方案主要分为三步。
4.第一步环境建模,任务空间环境建模是路径规划的前提,有很多的环境建模方法对任务空间进行抽象化处理,目的是提供一个可行的用于路径规划的环境模型。作为路径规划研究的前提条件,任务空间的环境建模对于路径规划问题的研究至关重要。任务环境建模方法主要有栅格法、几何建模法和拓扑建模法等。
5.第二步,路径搜索,路径搜索通过调用路径规划算法在已经建立的环境模型中规划出一条路径,使得所规划路径在某些性能方面实现最优,比如时间最短、路径最短或者是搜索范围最小等。
6.第三步路径平滑,通过路径规划算法所规划的路径通常情况下存在冗余路径节点或者存在一些没有必要的转弯,往往需要对初步得到路径加以相应的处理,以达到平滑效果。
7.随着科技的不断进步,世界各国在无人机等智能体的路径规划方面取得了不错的成绩。路径规划在各个领域都有涉及,比如网络系统、军事作战系统、交通运输系统等等,在各个领域的学者或专家为了满足任务需要便提出了各种各样的路径规划方法,但这些方法并未大规模应用于实际当中去。
8.栅格法是路径规划的环境建模中经常被用到。在本技术文件说明书具体实施例中公开的现有技术中,文献[19]利用栅格法对任务空间进行环境建模,有效的提高了算法的效率。文献[22]首先将三维空间进行栅格编码化处理,并且对复杂的任务空间进行空间分割,然后将高度层引导因子加入到蚁群算法的启发信息当中,成功的实现了从三维空间到二维空间的降维操作,不仅提高了所规划路径的精确度还提高了算法的效率。
[0009]
蚁群算法与遗传算法也受到许多路径规划研究学者的青睐。文献[20]有效的将时间融入到构型空间中形成了ct构型空间,并采用prm方法来进行任务空间的环境建模,然后通过加入环境约束和无人机的自身性能约束条件下的改进信息素的更新机制的蚁群算法来进行寻路操作。文献[25]根据雷达对无人机的瞬时探测概率模型来确定蚁群算法中每个栅格的信息素的分布情况并且将不会更新栅格内的信息素分布情况,并将燃油代价和威胁
代价等约束条件作为下一个栅格的条件,同时了保证不会陷入死锁区域而假定蚂蚁可以进行后退操作,最后结合voronoi图算法来保证规划路径性能次优或最优。文献[24]提出了一种基于勾股速端曲线的遗传模拟退火算法的路径规划算法,利用勾股速端曲线的平滑性,既保证全局与局部同时最优。文献[26]提出了一种包含有圆弧段、直线段以及clothoid曲线的混合路径算法,而且将无人机的本身性能作为算法的约束条件。文献[27]在使用遗传算法进行种群初始化的时候对搜索区域进行了一定的限制,从而进行种群优化,并在改进代价函数的基础上采用浮点数方法进行编码然后结合分层遗传算法进行无人机的路径规划操作。
[0010]
常见的路径规划方法除此之外还有人工势场法、模型预测算法等其它算法。文献[21]先通过连通性分析得到任务空间中的可行区域,在可行域的基础上进行航路预规划操作,接下来通过利用引入最小安全距离和采用相邻质点作为引力的改进人工势场法进行寻路操作,最后进行相应的曲率监测来保证规划路径的平滑性。文献[28]通过模型预测算法对动态障碍物的状态进行预测,然后采用滚动优化的方式对长度代价和威胁代价构成的目标函数进行优化操作来得到优化路径点进而实现路径规划。
[0011]
这些学者所提出的算法忽略了实际工作环境中可能存在的障碍物和无人机自身的运动、通信能耗,无法规划处符合任务需求的最佳路径。
[0012]
随着相关学者的深入研究便出现了一些路径规划经典理论算法此处主要介绍两种常用的路径规划算法。
[0013]
第一种为dijkstra算法,dijkstra算法可在有向图中计算一个节点到该节点能够连通的所有节点的最短路径,在进行寻路操作时每次都选择权值最小的那条路径,并且该算法的图中没有存在负权的边,是一种最短路径搜索算法。
[0014]
第二种为遗传算法,遗传算法通过特征交叉与变异等一系列的进化操作来达到目标,然后将目前最优的个体输出进而停止优化。该算法的优点是不容易陷入局部极小点,并且有可能会产生一条最优路径,同时不需要复杂的数学理论推导。
[0015]
无人机路径规划中一个常用的算法就是tsp算法。tsp算法得到的路径类型为折线。该算法的主要目标是最小化无人机飞行过程中的成本,主要应用于任务区域较大,地面用户较多或者无人机需要与地面用户近距离通信的场景中。例如无人机向地面的用户广播信息或者收集信息,给地面设备充电和传输文件等。tsp问题是组合优化问题中的np
‑
hard问题,很难得到最优解。文献[29]和文献[30]提出了多种启发式算法和近似算法,并且给出了高质量的解。如果想要将tsp算法应用到无人机的路径规划中,我们需要依据实际任务特点和需求选择应用tsp问题的不同变体。
[0016]
很多工作致力于研究无线传感器网络中传感器节点的聚类分簇问题,然而,他们很少综合讨论节点的地理位置、自身能量与收集到的数据量。一方面,节点的数据量不容忽视,数据传输造成的通信能耗在节点工作能耗中占有重要地位,另一方面,充分考虑节点在分簇后的剩余能量,将有利于网络工作时间的延长。
[0017]
使用能量有限的无人机逐个访问无线传感器网络中的所有节点难以实现,因而我们提出基于簇首节点的无人机协同侦察方法。这种方法综合考虑节点能量、数据量与地理位置进行聚类分簇,在网络中的所有节点中选取少量簇首节点作为无人机访问的目标节点,从而减少了无人机在数据收集过程中的任务量,提升了传感器网络的生命周期与无人
机的能量利用效率。
[0018]
基于此,本发明提出一种解决方案。
技术实现要素:
[0019]
本发明的目的在于提供一种面向无人机协同侦察的路径规划方法。
[0020]
本发明的目的可以通过以下技术方案实现:
[0021]
一种面向无人机协同侦察的路径规划方法,该方法具体包括下述步骤:
[0022]
步骤一:借助栅格法进行环境建模;具体方式为:
[0023]
将模拟任务空间等分为x1份,栅格边长为r’;
[0024]
步骤二:在无人机u
i
满足能量限制的条件下开始循环,调用a*算法,计算无人机当前所在节点c
s
与未访问节点c
ne
的最短距离,计算得到能耗e
m
(c
s
,c
ne
)、e
t
(u,c
ne
)、e
h
(c
ne
);
[0025]
步骤三:计算无人机到达每个未访问节点的总能耗e
sum
,取总能耗最小的节点作为下一待访问节点;
[0026]
步骤四:判断无人机当前剩余能量是否足够到达下一节点
[0027]
如果足够则将作为下一访问节点并继续循环寻找下一个目标点,否则从cs直接返回起点,无人机路径规划结束,得到路径l
i
;
[0028]
步骤五,进行路径优化,具体方式为:
[0029]
s1:对启发函数进行优化;
[0030]
s2:对拓展方向进行优化;
[0031]
在基于栅格法调用a*算法寻路时,将上、下、左、右四方向搜索优化为上、下、左、右、左上、左下、右上、右下八个方向的搜索;
[0032]
s3:借助圆弧段串联法进行路径平滑,得到平滑航迹;具体方式为:
[0033]
标定w1、w2与w3为三个连续的路径节点;w1、w2构成的直线与w2、w3构成的直线的夹角标定为θ;
[0034]
直线m为夹角θ的角平分线,则无人机的最小转弯半径圆的圆心位于直线m上;
[0035]
根据管理员给定的最小转弯半径r;在直线m上寻找点o,点o满足其与直线w1、w2的垂直距离为r,将垂足标记为p;
[0036]
以o为圆心,长度r为半径画圆,将该圆与直线w2、w3的切点标记为q;
[0037]
则将以o为圆心,最小转弯半径r为半径的圆弧标记为平滑航迹;
[0038]
s4:完成路径优化。
[0039]
进一步地,步骤一中的x1取值具体为三十,r’具体取值为3.33km。
[0040]
进一步地,
[0041]
步骤二中的a*算法具体为:
[0042]
通过比较当前节点的周围可行节点的估计代价大小来确定无人机的下一步运动方向和位置;其估计代价函数具体为:
[0043]
f(x)=r(x) h(x);
[0044]
式中,f(x)是估计代价函数,r(x)是实际代价函数,h(x)是启发函数;r(x)指从当前节点到周围可行节点的距离,h(x)指从周围可行节点到目标终点的距离。
[0045]
进一步地,a*算法根据估计代价函数来确定下一个运动节点的方向和位置;a*算法在路径规划的过程中有两个用来存储节点的列表,一个是open表,用来存储当前节点x周围准备搜索的可行节点集合;另一个是closed列表,用来储存已经被探索过且估计代价值最小的可行节点;
[0046]
当目标节点d在closed列表中时结束节点的搜索,同时将closed列表中的节点按照节点存储的相反顺序返回,返回节点构成所规划路径。
[0047]
进一步地,当前节点x的前一个可行节点称为父节点,当前节点x的下一个可行节点称之为子节点。
[0048]
进一步地,步骤s1中的对启发函数进行优化的具体方法为:
[0049]
a*算法的路径规划效果与启发函数有关,我们将算法的启发函数改写为
[0050]
f(x)=r(x) w
·
h(x);
[0051][0052]
式中,w为代价h(x)的权重系数,通过改变系数的值,改变算法寻点的拓展速度,从而改变路径规划的速度。
[0053]
本发明的有益效果:
[0054]
本发明综合考虑无人机的通信、飞行与悬停能耗,研究了能量有限条件下无人机依次访问节点的路径规划方法,首先对问题进行环境建模,然后提出了mc算法并对得到的路径进行优化。对于针对多无人机路径规划打下基础。
附图说明
[0055]
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
[0056]
图1为本发明的系统框图;
[0057]
图2无人机路径规划示意图;
[0058]
图3栅格法环境建模示意图;
[0059]
图4 mc算法示意图;
[0060]
图5优化前后寻路时间对比图;
[0061]
图6 a*算法四方向搜索示意图;
[0062]
图7 a*算法八方向搜索示意图;
[0063]
图8圆弧段串联法示意图;
[0064]
图9路径平滑示意图;
[0065]
图10信息采集量对比图;
[0066]
图11信息采集量对比图;
[0067]
图12三维航迹节点拓展示意图;
[0068]
图13初始能量为500j时的仿真结果;
[0069]
图14初始能量为100j时的仿真结果;
[0070]
图15三维路径规划示意图。
具体实施方式
[0071]
本技术基于战场复杂地理环境,设计了无人机协同侦察的路径规划方法,首先对
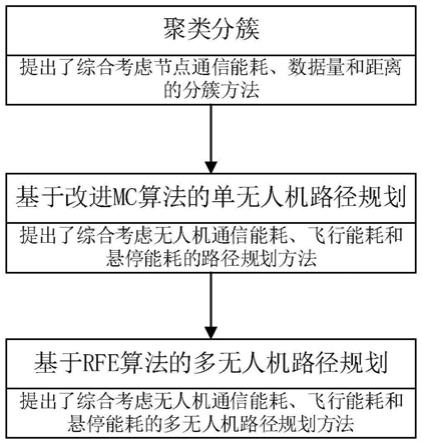
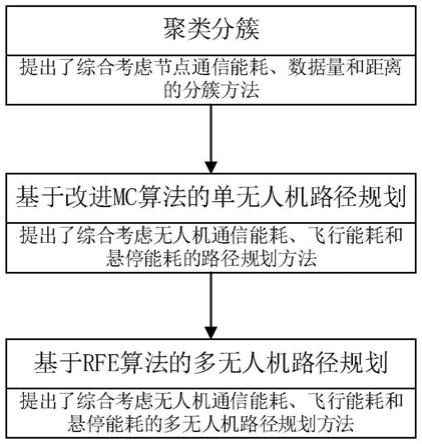
网络中的传感器节点进行聚类分簇,选取少量簇首节点作为无人机的目标访问节点;然后,设计障碍物条件下无人机访问目标节点的路径规划算法。主要工作如下:
[0072]
(1)在分布有较多节点的无线传感器网络中,研究节点聚类分簇的问题,提出综合考虑传感器能量、数据量和距离mincost gaf(geographical adaptive fidelity)算法。接着,针对环境中节点分布不均匀,提出考虑节点剩余能量与通信能耗的mincost leach(low energy adaptive clustering hierarchy)算法。仿真结果表明,所提出的两种算法与其它算法相比都可提高无线传感器网络的工作生命周期。
[0073]
(2)在综合考虑无人机通信、飞行和悬停能耗的情况下,研究单架无人机协同侦察收集数据量最大化问题。首先,对该问题进行建模分析,它是tsp(travelling salesman problem)问题,即一种典型的组合优化问题,该问题已被证明是np
‑
hard问题。然后,提出了一种障碍物条件下的基于有限能量的mc(multiple circulation)算法,以此为根据在二维空间与三维空间规划无人机的路径。接着,对初步规划的路径进行拓展方向优化和平滑处理。仿真结果表明,所提出的算法使得网络数据采集量可有效提高。
[0074]
(3)在无人机能量充足,考虑飞行、通信和悬停能耗的情况下,研究多架同构无人机协同侦察场景下能耗公平性问题。针对能耗公平的路径规划问题,提出一种启发式算法rfe(reatlively fair energy consumption),该算法首先得到覆盖所有待访问簇首节点的路径,然后基于每架无人机能耗公平原理对该路径进行分解。仿真结果表明,提出的算法能较好地解决能耗公平性问题。
[0075]
如图1所示,本文研究解决的问题是无人机协同传感器收集战场数据信息,第一部分主要解决无线传感器网络中节点的聚类分簇问题,合理选择目标节点。第二部分和第三部分主要研究无人机访问目标节点,合理规划路径的问题。
[0076]
基于上述内容,本技术提供一种面向无人机协同侦察的路径规划方法,该方法具体包括下述步骤:
[0077]
步骤一:问题建模与形式化表征;
[0078]
s1:针对带有中继无人机的侦察场景进行研究,如图2所示,侦察无人机离开中继无人机的位置,按照规划好的路径,采集监测区域内所有簇首节点的数据信息,并返回出发位置将信息传输给中继无人机,由中继无人机汇总后传输给基站;
[0079]
在整个任务中,侦察无人机u
i
的初始位置为p
r
=(x
r
,y
r
),在固定高度h匀速飞行,初始能量为完成侦察任务后收集的数据量为
[0080]
无人机能耗主要分为两部分,第一部分是与通信相关的能耗第二部分是与运动相关的能耗,包括飞行能耗与悬停能耗由于侦察无人机不需要返回基站传输信息,可以节约无人机飞行到基站的飞行能量;
[0081]
簇首节点的集合为c={c1,
…
,c
j
,
…
,c
m
},节点c
j
拥有的数据量为v
j
,位置为
[0082]
s2:构建运动能耗模型;
[0083]
在侦察任务中,为了使无人机自由移动或者保持悬停,其需要消耗运动能量;在这种情况下,主要的运动能量消耗包括飞行和悬停能量消耗;飞行能耗e
m
主要与无人机飞行
的路径长度有关,具体计算方式为:
[0084]
e
m
=q
·
l;
[0085]
公式一;
[0086]
式中,q为单位长度能量消耗率,以j/m为单位,l为无人机飞行路径的长度;
[0087]
本技术中侦察无人机悬停在传感器节点正上方收集信息,侦察无人机单位时间内消耗的悬停能耗定义为p
hv
,以j/s为单位;悬停能耗主要受到其悬停的时间与悬停高度影响;因此,无人机在目标点c
j
的悬停能耗定义为:
[0088][0089]
式中,悬停时间可根据每个目标点需要传输的数据量计算;信息传输速率定义为b,单位为bit/s,每个簇首节点的数据量为v
j
,因此,悬停能耗可定义如下
[0090][0091]
s3:构建通信能耗模型;
[0092]
参照公式二,无人机u
i
与簇首节点c
j
间的数据通信能耗表示为
[0093][0094]
式中,v
j
表示簇首节点c
j
拥有的数据量,h为无人机的飞行高度;此处考虑到侦察无人机返回到中继无人机附近进行数据传输,因距离很近,侦察无人机的数据发送能耗忽略不计;
[0095]
问题形式化描述
[0096]
对具有能量约束的侦察无人机进行路径规划。将无人机u
i
从中继无人机处出发再返回中继无人机位置记为一个工作周期t
i
,在t
i
内无人机完成了侦察任务;下面列出本章研究问题的限制条件:
[0097]
1)簇首节点位置已知,wsn中每个传感器节点的位置是固定的。
[0098]
2)障碍物的位置信息已知,会遇到何种形状的障碍物也是已知。
[0099]
3)无人机的能量有限为e
u
,在一个工作周期t
i
内不能保证访问所有的簇首节点,无人机匀速飞行。
[0100]
下面对问题进行形式化表达,假设侦察无人机u
i
从初始位置p
r
=(x
r
,y
r
)出发开始执行侦察任务。侦察无人机的总能耗包括飞行、悬停与通信能耗三部分,在一个工作周期t
i
内,可表示为
[0101][0102]
剩余能量er
i
可表示为
[0103]
er
i
=e
u
‑
e
i
;公式六
[0104]
式中,p
i,t
为二元变量,当值为1时,表示在t时刻,无人机的地理位置是p
i
;当值为0表示在t时刻,地理位置不为p
i
;
[0105]
综合考虑障碍物,uav通信、运动能耗,规划无人机的路径,收集得到信息综合考虑障碍物,uav通信、运动能耗,规划无人机的路径,收集得到信息具体为:
[0106][0107]
限制条件的第一条和第二条说明,无人机从起始位置出发并最终起始位置,第三条说明在执行侦察任务过程中无人机的剩余能量er
i
多于0.1e
u
才可以正常工作;
[0108]
基于上述研究内容,提供一种基于mc(multiple circulation)算法的无人机二维路径规划设计;借助mc算法来解决存在障碍物的条件下能量有限的无人机收集检测区域最大信息价值的问题;该算法的主要思想是使用栅格法进行环境建模,然后调用a*算法计算无人机当前访问节点与所有未访问节点所需要的能耗,再基于nn(nearest neighbour)算法的思想选定使无人机能耗最小的节点作为下一访问节点,通过多次循环确定无人机依次访问目标节点的顺序,最终连接各节点与起始点构成闭合往返飞行路径;
[0109]
mc算法原理如表3
‑
2所示;此处具体给出一种面向无人机协同侦察的路径规划方法,下面具体给出mc算法,
[0110]
步骤一:通过栅格法进行环境建模;
[0111]
通常情况下,采用栅格法进行环境建模时会将栅格大小设计的较为适中,这样既能够保证规划精度又能在一定程度上保证规划效率;本技术中将模拟任务空间三十等分,栅格边长r’取值为3.33km,建模示意如图3所示;
[0112]
a*算法是一种启发式搜索算法,启发式搜索的意思是选择当前可选节点集中最有“希望”的节点;它的主要思想是通过比较当前节点的周围可行节点的估计代价大小来确定无人机的下一步运动方向和位置;其估计代价公式具体为:
[0113]
f(x)=r(x) h(x);公式八;
[0114]
式中,f(x)是估计代价函数,r(x)是实际代价函数,h(x)是启发函数;r(x)指从当前节点到周围可行节点的距离,h(x)指从周围可行节点到目标终点的距离;
[0115]
a*算法根据估计代价函数来确定下一个运动节点的方向和位置;a*算法在路径规划的过程中有两个用来存储节点的列表,一个是open表,用来存储当前节点x周围准备搜索的可行节点集合;另一个是closed列表,用来储存已经被探索过且估计代价值最小的可行节点;
[0116]
当目标节点d在closed列表中时结束节点的搜索,同时将closed列表中的节点按照节点存储的相反顺序返回,返回节点构成所规划路径。其中当前节点x的前一个可行节点称为父节点,当前节点x的下一个可行节点称之为子节点。
[0117]
步骤二:在无人机u
i
满足能量限制的条件下开始循环,调用a*算法,计算无人机当前所在节点c
s
与未访问节点c
ne
的最短距离,计算得到能耗e
m
(c
s
,c
ne
)、e
t
(u,c
ne
)、e
h
(c
ne
)。
[0118]
步骤三:计算无人机到达每个未访问节点的总能耗e
sum
,取总能耗最小的节点作为下一待访问节点。
[0119]
步骤四:判断无人机当前剩余能量是否足够到达下一节点并返回起点start,
如果足够则将作为下一访问节点并继续循环寻找下一个目标点,否则从c
s
直接返回起点,无人机路径规划结束,得到路径l
i
,算法示意图如图4所示。
[0120]
步骤五:进行路径优化,具体方式为:
[0121]
s1:对启发函数进行优化;
[0122]
a*算法的路径规划效果与启发函数有关,我们将算法的启发函数改写为:
[0123]
f(x)=r(x) w
·
h(x);
[0124]
式中。w为代价h(x)的权重系数,通过改变系数的值,改变算法寻点的拓展速度,从而改变路径规划的速度,w的具体数值通过管理人员设定;如图5所示,当权重系数取值为2时,优化后寻路时间明显降低。
[0125]
s2:对拓展方向进行优化;
[0126]
在基于栅格法调用a*算法寻路时,将“上、下、左、右”四方向搜索优化为“上、下、左、右、左上、左下、右上、右下”八个方向的搜索,从而有效缩短规划路径的长度,如图6、图7所示。
[0127]
图7中旗子处代表待访问的目标点,中方格内部左上角的标识为代价估计值,左下角的标识为实际代价值,右下角的标识为启发函数预算值。
[0128]
s3:进行路径平滑处理,具体为:
[0129]
无人机沿路径飞行在转弯时速度会有突变,会对飞行的平稳性造成严重影响,所以本文使用圆弧段串联法进行路径平滑;
[0130]
如图8所示;w1、w2与w3是三个连续的路径节点,夹角为θ,直线m为夹角θ的角平分线,无人机的最小转弯半径圆的圆心一定位于直线m上,在给定了最小转弯半径r后,令且op=r,那么点p就是航迹与最小转弯半径圆的切点,同理可以在上找到切点q,那么以o为圆心,最小转弯半径r为半径的圆弧就是平滑后的航迹。
[0131]
图9中轨迹一为优化前的轨迹,轨迹二为优化后的轨迹,由图可见轨迹优化有效避免了无人机的大角度转弯,避免可能出现的速度突变情况。
[0132]
表3
‑
2 mc算法流程
[0133]
[0134][0135]
为进一步验证算法的有效性,本技术还同时实现并比较了mc算法、优化mc算法与遗传算法;
[0136]
1、簇首节点数目对信息采集量的影响;
[0137]
本仿真展示了当无人机目标点(簇首节点)数目不断增加时,采用不同的路径规划算法引起的最终采集数据量的不同。图10表明随着簇首节点个数增加,无人机采集到的数据量不断增加。在节点数目达到5之前,三种算法在网络中采集到的数据量相差不大,但是在超过5个节点之后,本章提出的优化mc算法收集方法略有优势,这是因为无人机的能量有限,而优化mc算法规划出的路径较其它两种算法更短,因而飞行能耗更小,故可以访问更多的簇首节点。
[0138]
2、障碍物覆盖面积对信息采集量的影响;
[0139]
本仿真在任务环境中有十六个簇首节点时展示了障碍物覆盖面积对采集数据量的影响。图11的仿真结果表明随着障碍物覆盖面积的增大,三种算法采集的数据量都随之减小,这是因为障碍物面积的增大导致规划的路径增大,无人机飞行能耗增大,因而能够访问的节点数目越来越少。相比其它两种算法,优化mc算法表现出了较好的性能,这是因为它规划的路径长度为最优路径,因而飞行能耗更少。当障碍物面积超过70%时,采集的数据量急剧减少,这是因为由于障碍物过多,无人机无法找到前往可访问节点的路径。所有优化mc算法的性能更好一些。
[0140]
3、基于mc算法的无人机三维路径规划设计;
[0141]
在三维空间中解决无人机路径规划问题时,我们将敌方的雷达照射区域与高山等看作无人机不能经过的障碍物区域。无人机从起始位置出发,绕过障碍物区域,飞行至地面传感器节点的正上方固定高度处收集信息并最终返回起点。
[0142]
我们在三维空间调用mc算法进行路径规划时,基本流程与二维空间下进行路径规划时相同。不同点是三维空间下使用a*算法对航迹节点的拓展时,需要将空间离散点化。
[0143]
从图12可以看到,在离散点化后的三维空间中,一个父节点共对应26个子节点。由于需要探索的子节点数目较多,导致mc算法在三维规划中存在搜索过慢的问题。
[0144]
具体实例的数值仿真结果:
[0145]
(1)评估设置
[0146]
使用matlab软件进行仿真测试,本节仿真参数如表5
‑
2。
[0147]
表5
‑
2仿真参数设置
science and engineering(case).ieee,2016.
[0164]
[4]yin s,tan j,li l,et al.power control and trajectory design for uav
‑
assisted communications[c]//ieee 87th vehicular technology conference.ieee,2018.
[0165]
[5]yang d,wu q,zeng y,et al.energy tradeoff in ground
‑
to
‑
uav communication via trajectory design[j].ieee transactions on vehicular technology,2018,67(7):6721
‑
6726.
[0166]
[6]wei li,research on the uav based data collection method in wireless sensor network.2016
[0167]
[7]y.yun and y.xia,“maximizing the lifetime of wireless sensor networks with mobile sink in delay
‑
tolerant applications,”ieee trans.mobile comput.,vol.9,no.9,pp.1308
–
1318,sep.2010.
[0168]
[8]miao zhao,member,ieee,and yuanyuan yang,fellow,ieee,“bounded relay hop mobile data gathering in wireless sensor networks”,ieee transactions on computers,vol.61,no.2.pp.265
–
277,2012
[0169]
[9]songtao guo,member,ieee,cong wang,and yuanyuan yang,fellow,ieee.joint mobile data gathering and energy provisioning in wireless rechargeable sensor networks[j].ieee transactions on mobile computing,2014.
[0170]
[10]m.ma,y.yang,and m.zhao,“tour planning for mobile data
‑
gathering mechanisms in wireless sensor networks.”ieee t.vehicular technology,vol.62,no.4,pp.1472
–
1483,may
‑
2013 2013.
[0171]
[11]j.l.sy wu,“evolutionary path planning of a data mule in wireless sensor network by using shortcuts,”in ieee congress on evolutionary computation.ieee,july 2014.
[0172]
[12]x.wu,g.chen,and s.k.das.avoiding energy holes in wireless sensor networks with nonuniform node distribution.parallel and distributed systems,ieee transaction on,19(5):710
‑
720,2008.
[0173]
[13]j.y.jung and m.a.ingram.residual
‑
energy
‑
activated cooperative transmission(react)to avoid the energy hole.in communications workshops(icc),2010ieee international conference on,pages 1
‑
5.ieee,2010.
[0174]
[14]he l,pan j,xu j.reducing data collection latency in wireless sensor networks with mobile elements[c]//computer communications workshops(infocom wkshps),2011ieee conference on.ieee,2011:572
‑
577.
[0175]
[15]z.gu,q.
‑
s hua,y.wang,and f.lau reducing information gathering latency through mobile aerial sensor network.in infocom,2013proceedings ieee,pages 656
‑
664,april 2013.
[0176]
[16]abdulla aeaa,md fadlullah z,nishiyama h,et al.toward fair maximization of energy efficiency in multiple uas
‑
aided networks:a game
‑
theoretic methodology[j].wireless communications,ieee transactions on,2015,14
(1):305
‑
316.
[0177]
[17]wu q,xu j,zhang r.uav
‑
enabled broadcast channel:trajectory design and capacity characterization[c]//international conference on communications workshops.ieee,2018.
[0178]
[18]rego c,gamboa d,glover f,et al.traveling salesman problem heuristics:leading methods,implementations and latest advances[j].european journal of operational research,2011,211(3):427
‑
441.
[0179]
[19]李喜刚,蔡远利.基于改进蚁群算法的无人机路径规划[j].飞行力学,2017,35(01):52
‑
56.
[0180]
[20]刘洋,章卫国,李广文等.动态环境中的无人机路径规划方法[j].北京航空航天大学学报,2014,40(2):252
‑
256.
[0181]
[21]丁家如,杜昌平,赵耀等.基于改进人工势场法的无人机路径规划算法[j].计算机应用,2016,36(1):287
‑
290.
[0182]
[22]魏潇龙,姚登凯,谷志鸣等.基于分割法的无人机路径规划研究[j].计算机仿真,2016,33(01):90
‑
94 132。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。