1.本发明涉及自动导引运输车技术领域,具体为一种抱夹式自动导引运输车。
背景技术:
2.自动导引运输车(automated guided vehicle,agv),是指装备有电磁或光学等自动导引装置,能够沿着规定的轨道行驶的运输车。近些年来,随着社会经济的高速发展,电商时代的来临,生产力度不断增大,产品运输也随之增多,而经常需要运送货物,这时候agv小车就起到了很大的作用。在现今社会,很多物流、制造厂家都纷纷引进agv小车来进行物料、货物运输工作,agv作为智能搬运设备之一,车身集成各种传感器、控制软件、导航等设备,甚至于人工智能等技术的加持,目前市面上的自动导引运输车基本用于搬运货架上的货物,将货物放置在运输车表面,从而实现运输,但是对于在地面放置的散件,通常都需要进行人工搬运,非常费时费力,即使设置自动拾取机器人,也不能够根据货物的位置来调整拾取的高度,适应性较差。
技术实现要素:
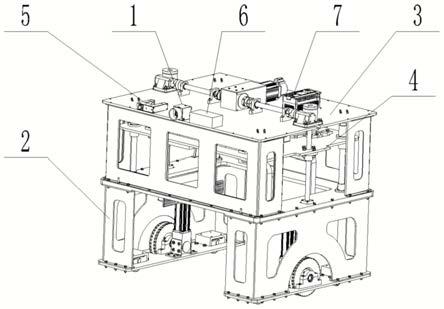
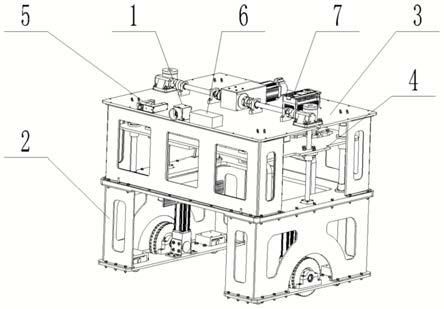
3.针对现有技术的不足,本发明提供了一种抱夹式自动导引运输车,包括行走装置,所述行走装置的上方固定安装有提升装置,所述提升装置通过传动组件与抱夹装置传动连接,所述提升装置的上表面固定安装有ccd摄像机、超声波传感器、无线路由器和控制装置。
4.所述行走装置包括左右对称设置的两组支撑架,每组支撑架均包括底盘,所述底盘上表面通过支撑底板垂直固定有三块支撑侧板,所述支撑侧板上方与连接板固定连接;减速器通过减速器支座固定安装在所述底盘上表面中间位置,伺服电机的输出轴与减速器的输入轴相连,所述减速器的输出轴通过车轮轴与主动轮连接,所述主动轮转动安装在第一轴承座之间,所述底盘两侧还转动安装有两个万向轮。
5.所述提升装置包括提升盖板和提升载板,所述提升盖板和提升载板通过提升侧板固定连接,所述提升载板通过螺栓固定安装在所连接板的上方;
6.所述提升盖板上表面中间位置固定安装有提升电机,所述提升电机的输出轴与t型减速换向器的输入轴连接,所述t型减速换向器两侧通过第一联轴器与传动轴相连,两根传动轴均通过第二轴承座固定在提升盖板上表面,所述传动轴远离所述t型减速换向器的一端均与蜗轮丝杠升降机相连接,所述蜗轮丝杠升降机通过螺母固定在提升盖板上,所述蜗轮丝杠升降机的输出端与丝杠的一端转动连接,所述丝杠另一端转动连接在轴承座组件内,所述轴承座组件固定在提升载板上表面;所述提升盖板与所述提升载板之间通过导向轴支座固定设置有四根导向轴,抱夹装置通过滑动套筒滑动套设在四根导向轴的表面,所述丝杠表面的丝杠螺母与所述抱夹载板固定连接。
7.所述抱夹装置包括抱夹载板,所述抱夹载板上开设有与所述滑动套筒和所述丝杠螺母外形相适配的通孔,所述抱夹载板上表面固定安装有步进电机,所述步进电机输出端通过第二联轴器与双向丝杠转动连接,所述双向丝杠通过丝杠支座固定在所述抱夹载板上
表面,所述双向丝杠的表面对称套设有两个丝杠螺母,每个所述丝杠螺母均与一个滑动横板上表面固定连接,所述抱夹载板上固定设置有四个托板,每个托板上均固定安装有导向光轴支座,相对应的两个导向光轴支座之间安装有导向光轴,两根导向光轴的方向与所述双向丝杠的方向平行,所述滑动横板通过滑块套设在导向光轴表面,抱夹臂的一端通过槽型安装板固定安装在所述滑动横板的下表面,抱夹臂的另一端固定安装有防滑夹板。
8.所述的ccd摄像机、超声波传感器、无线路由器和控制装置均安装在提升盖板上。所述控制装置包括嵌入式控制器以及控制系统;控制系统包括自主行走模块,图像控制模块,信息交互模块。
9.一种通过抱夹式自动导引运输车对物体进行运输的方法,所述方法包括如下步骤:
10.步骤一:首先ccd摄像机对车间环境信息进行视觉信息采集,然后通过无线路由器将采集到的车间环境信息传送到上位机,上位机对接收到的视觉数据信息进行分析,提取到小车起点位置信息及车间环境信息,同时构建出相应的拓扑图,拓扑图中相应的节点(n1,n2,n3…
n
i
),分别对应的车间货物存在的位置信息,其坐标为(x1,y1),(x2,y2),(x3,y3)
…
(x
i
,y
i
),在利用dijkstra算法计算出小车初始位置到下个货物目标点的最短路径信息。
11.步骤二:上位机将拓扑图及规划的最优路径信息传送至控制装置,控制装置接收到相应指令后,控制行走装置移动,当行走装置沿着最优路径行驶时,两个伺服电机带动减速器,车轮轴和主动轮共同旋转,带动小车直行,直行时两侧车轮速度不能保证完全一致,会导致小车产生位置偏差,需要对两侧车轮速度纠偏,若左侧车轮为速度v1,右侧车轮速度为v2,小车向左偏差距离d,则在下一时刻设定小车左侧车轮速度v
′1=v1 λd τθ,小车右侧车轮速度v
′2=v2‑
λd
‑
τθ,其中λ和τ为校正系数,可调节小车直行时位置偏差,当小车转弯时,通过控制两个伺服电机电机差速使小车一侧的驱动轮转速大于另一侧,从而实现转弯,当小车在运行过程中,超声波传感器检测到障碍物时,通过ccd摄像机采集到障碍物图像信息,判断出障碍物位置信息,通过无线路由器6传输到上位机,上位机对接收到的视觉数据信息进行分析,重新规划路线,使小车实现避障。
12.步骤三:当小车到达预定的搬运货物位置,行走装置运动停止,控制装置向提升电机驱动器发送命令,提升电机通过t型减速换向器带动传动轴旋转,传动轴通过联轴器带动蜗轮丝杠升降机转动,同时蜗轮丝杠升降机驱动丝杠旋转,在四根导向轴的共同作用,带动抱夹装置下降。
13.步骤四:抱夹装置下降到指定位置时,控制装置发出相应指令,抱夹装置上的步进电机通过联轴器带动双向丝杠旋转,从而带动滑动横板相向运动,使固定在滑动横板上的抱夹臂相向运动,实现对物体的夹取;当抱夹臂夹紧货物后,提升电机反向转动,通过提升装置3将货物提起,完成相应操作后,将货物移动到目的地。
14.与现有技术相比,本发明具有以下优点:
15.第一,本发明由于采用了抱夹装置,解决了在开放式场景下对于散件的搬运问题,能够大大提高搬运效率,节省人力物力。
16.第二,本发明采用抱夹机构和提升机构相结合,提高了装置保运货物的高度,能够适应不同高度的货物的拾取,大大节省了装置运行空间,提高了设备的适应场景。
17.第三,本发明采用的ccd摄像机获取周围环境信息,并确定小车起点位置和周围环境,通过路径规划算法获取最优路径,并运动到目标点,并通过无线传输,可以实时对货物进行跟踪和监控。
18.第四,本发明采用超声波传感器,ccd摄像头,上位机共同协作,能够实现实时避障功能,超声波声波传感器检测到障碍物时,通过ccd摄像机采集到的障碍物图像信息,判断出障碍物位置信息,通过无线路由器传输到上位机,上位机对接收到的视觉数据信息进行分析,重新规划路线,从而实现实时避障功能。
附图说明
19.图1为本发明结构示意图;
20.图2为行走装置示意图;
21.图3为主动轮结构示意图;
22.图4为提升装置示意图1;
23.图5为提升装置示意图2;
24.图6为抱夹装置示意图;
25.图7为抱夹臂结构示意图;
26.图中:1ccd摄像机;2行走装置;3提升装置;4抱夹装置;5超声波传感器;6无线路由器;7控制装置;2
‑
1伺服电机;2
‑
2减速器;2
‑
3减速器支座;2
‑
4车轮轴;2
‑
5第一轴承座;2
‑
6主动轮;2
‑
7万向轮;2
‑
8支撑底板;2
‑
9支撑侧板;2
‑
10连接板;2
‑
11底盘;3
‑
1提升电机;3
‑
2t型减速换向器;3
‑
3第一联轴器;3
‑
4传动轴;3
‑
5第二轴承座;3
‑
6蜗轮丝杠升降机;3
‑6‑
1螺杆;3
‑6‑
2丝杠轴承;3
‑
7轴承座组件;3
‑
8导向轴;3
‑
9导向轴支座;3
‑
10滑动套筒;3
‑
11提升盖板;3
‑
12提升侧板;3
‑
13提升载板;4
‑
1步进电机;4
‑
2抱夹载板;4
‑
3第二联轴器;4
‑
4双向丝杠;4
‑
5丝杠支座;4
‑
6丝杠螺母;4
‑
7导向光轴;4
‑
8导向光轴支座;4
‑
9托板;4
‑
10滑块;4
‑
11槽型安装板;4
‑
12抱夹臂;4
‑
13防滑夹板;4
‑
14滑动横板。
具体实施方式:
27.下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1所示,一种抱夹式自动导引运输车,包括行走装置2,所述行走装置2的上方固定安装有提升装置3,所述提升装置3通过传动组件与抱夹装置4传动连接,所述提升装置3的上表面固定安装有ccd摄像机1、超声波传感器5、无线路由器6和控制装置7。
29.如图2和图3所示,所述行走装置2包括左右对称设置的两组支撑架,每组支撑架均包括底盘2
‑
11,所述底盘2
‑
11上表面通过支撑底板2
‑
8垂直固定有三块支撑侧板2
‑
9,所述支撑侧板2
‑
9上方与连接板2
‑
10固定连接;减速器2
‑
2通过减速器支座2
‑
3固定安装在所述底盘2
‑
11上表面中间位置,伺服电机2
‑
1的输出轴与减速器2
‑
2的输入轴相连,所述减速器2
‑
2的输出轴通过车轮轴2
‑
4与主动轮2
‑
6连接,所述主动轮2
‑
6转动安装在第一轴承座2
‑
5之间,所述底盘2
‑
11两侧还转动安装有两个万向轮2
‑
7。连接板2
‑
10上设有相应的螺纹孔,
用来将行走机构与抱夹提升机构固定在一起形成一个整体。
30.如图4和图5所示,所述提升装置3包括提升盖板3
‑
11和提升载板3
‑
13,所述提升盖板3
‑
11和提升载板3
‑
13通过提升侧板3
‑
12固定连接,所述提升载板3
‑
13通过螺栓固定安装在所连接板2
‑
10的上方;
31.所述提升盖板3
‑
11上表面中间位置固定安装有提升电机3
‑
1,所述提升电机3
‑
1的输出轴与t型减速换向器3
‑
2的输入轴连接,所述t型减速换向器3
‑
2两侧通过第一联轴器3
‑
3与传动轴3
‑
4相连,两根传动轴3
‑
4均通过第二轴承座3
‑
5固定在提升盖板3
‑
11上表面,所述传动轴3
‑
4远离所述t型减速换向器3
‑
2的一端均与蜗轮丝杠升降机3
‑
6相连接,所述蜗轮丝杠升降机3
‑
6通过螺母固定在提升盖板3
‑
11上,所述蜗轮丝杠升降机3
‑
6的输出端与丝杠3
‑6‑
1的一端转动连接,所述丝杠3
‑6‑
1另一端转动连接在轴承座组件3
‑
7内,所述轴承座组件3
‑
7固定在提升载板3
‑
13上表面;所述提升盖板3
‑
11与所述提升载板3
‑
13之间通过导向轴支座3
‑
9固定设置有四根导向轴3
‑
8,抱夹装置通过滑动套筒3
‑
10滑动套设在四根导向轴3
‑
8的表面,所述丝杠3
‑6‑
1表面的丝杠螺母3
‑6‑
2与所述抱夹载板4
‑
2固定连接。提升电机3
‑
1通过t型减速换向器3
‑
2带动传动轴3
‑
4旋转,传动轴3
‑
4通过联轴器3
‑
3带动蜗轮丝杠升降机3
‑
6转动,同时蜗轮丝杠升降机3
‑
6驱动丝杠3
‑6‑
1旋转,在四根导向轴3
‑
8的共同作用,带动抱夹装置下降。
32.如图6和图7所示,所述抱夹装置4包括抱夹载板4
‑
2,所述抱夹载板4
‑
2上开设有与所述滑动套筒3
‑
10和所述丝杠螺母3
‑6‑
2外形相适配的通孔,所述抱夹载板4
‑
2上表面固定安装有步进电机4
‑
1,所述步进电机4
‑
1输出端通过第二联轴器4
‑
3与双向丝杠4
‑
4转动连接,所述双向丝杠4
‑
4通过丝杠支座4
‑
5固定在所述抱夹载板4
‑
2上表面,所述双向丝杠4
‑
4的表面对称套设有两个丝杠螺母4
‑
6,每个所述丝杠螺母4
‑
6均与一个滑动横板4
‑
14上表面固定连接,所述抱夹载板4
‑
2上固定设置有四个托板4
‑
9,每个托板4
‑
9上均固定安装有导向光轴支座4
‑
8,相对应的两个导向光轴支座4
‑
8之间安装有导向光轴4
‑
7,两根导向光轴4
‑
7的方向与所述双向丝杠4
‑
4的方向平行,所述滑动横板4
‑
14通过滑块4
‑
10套设在导向光轴4
‑
7表面,与所述导向光轴4
‑
7滑动配合。抱夹臂4
‑
12的一端通过槽型安装板4
‑
11固定安装在所述滑动横板4
‑
14的下表面,抱夹臂4
‑
12的另一端固定安装有防滑夹板4
‑
13;当滑动横板4
‑
14运动时,带动固定在下面的滑块4
‑
10,抱夹臂4
‑
12和防滑夹板4
‑
13一起运动,从而起到夹紧物体的作用。
33.所述的ccd摄像机1、超声波传感器5、无线路由器6和控制装置7均安装在提升盖板3
‑
11上,所述的无线路由器6型号是蒲公英cpe r300,能够扩展传输距离,提供最高能达150mbps的稳定传输,所述的ccd摄像机1用于对车间环境和货物的识别及定位。所述控制装置7包括嵌入式控制器以及控制系统;控制系统包括自主行走模块,图像控制模块,信息交互模块。所述超声波传感器5用于检测小车在运行过程中是否遇到障碍物。
34.一种通过抱夹式自动导引运输车对物体进行运输的方法,所述方法包括如下步骤:
35.步骤一:首先ccd摄像机1对车间环境信息进行视觉信息采集,然后通过无线路由器6将采集到的车间环境信息传送到上位机,上位机对接收到的视觉数据信息进行分析,提取到小车起点位置信息及车间环境信息,同时构建出相应的拓扑图,拓扑图中相应的节点(n1,n2,n3…
n
i
),分别对应的车间货物存在的位置信息,其坐标为(x1,y1),(x2,y2),(x3,
y3)
…
(x
i
,y
i
),在利用dijkstra算法计算出小车初始位置到下个货物目标点的最短路径信息。
36.步骤二:上位机将拓扑图及规划的最优路径信息传送至控制装置7,控制装置7接收到相应指令后,控制行走装置2移动,当行走装置2沿着最优路径行驶时,两个伺服电机2
‑
1带动减速器2
‑
2,车轮轴2
‑
4和主动轮2
‑
6共同旋转,带动小车直行,直行时两侧车轮速度不能保证完全一致,会导致小车产生位置偏差,需要对两侧车轮速度纠偏,若左侧车轮为速度v1,右侧车轮速度为v2,小车向左偏差距离d,则在下一时刻设定小车左侧车轮速度v
′1=v1 λd τθ,小车右侧车轮速度v
′2=v2‑
λd
‑
τθ,其中λ和τ为校正系数,可调节小车直行时位置偏差,当小车转弯时,通过控制两个伺服电机2
‑
1电机差速使小车一侧的驱动轮转速大于另一侧,从而实现转弯,当小车在运行过程中,超声波传感器5检测到障碍物时,通过ccd摄像机1采集到障碍物图像信息,判断出障碍物位置信息,通过无线路由器6传输到上位机,上位机对接收到的视觉数据信息进行分析,重新规划路线,使小车实现避障。
37.步骤三:当小车到达预定的搬运货物位置,行走装置2运动停止,控制装置7向提升电机3
‑
1驱动器发送命令,提升电机3
‑
1通过t型减速换向器3
‑
2带动传动轴3
‑
4旋转,传动轴3
‑
4通过联轴器3
‑
3带动蜗轮丝杠升降机3
‑
6转动,同时蜗轮丝杠升降机3
‑
6驱动丝杠3
‑6‑
1旋转,在四根导向轴3
‑
8的共同作用,带动抱夹装置下降。
38.步骤四:抱夹装置4下降到指定位置时,控制装置7发出相应指令,抱夹装置4上的步进电机4
‑
1通过联轴器4
‑
3带动双向丝杠4
‑
4旋转,从而带动滑动横板4
‑
14相向运动,使固定在滑动横板4
‑
14上的抱夹臂4
‑
12相向运动,实现对物体的夹取;当抱夹臂4
‑
12夹紧货物后,提升电机3
‑
1反向转动,通过提升装置3将货物提起,完成相应操作后,将货物移动到目的地。
39.步骤五:重复上述操作,如此循环,达到搬运货物的目的。
40.以上仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。