1.本技术涉及溅射技术领域,尤其涉及一种用于提高靶材利用率的磁控溅射装置及其控制方法。
背景技术:
2.磁控溅射装置被广泛应用于集成电路的加工,磁控溅射镀膜是在二极直流溅射的基础上在靶材上方施加正交的电磁场,通过磁场束缚电子围绕靶面做螺线运动,增大电子与氩气撞击的概率,提高气体离化率和溅射产率的一种方法。
3.由于其优良的可控性和膜层结合力,被广泛应用于半导体制造工艺中。在薄膜的诸多特性中,均匀性是衡量薄膜质量和机台性能的一项重要指标,薄膜均匀性与很多因素有关,包括气体均匀性、磁场均匀性和靶基间距等;目前的溅射中磁力线固定,从两侧磁极指向中间磁极,靶材中间有较多的无效溅射区域。磁场强度较大的位置被溅射耗尽,必须更换新靶材,此时靶材中间区域有很多剩余量被浪费,导致靶材利用率低。
技术实现要素:
4.本技术的目的是提供一种磁控溅射装置及其控制方法,改善靶材中间区域溅射量少,靶材整体利用率低的问题。
5.本技术公开了一种磁控溅射装置,包括基台、靶材、溅射腔体和磁场调节器;所述基台用于放置基片;所述靶材与所述基台相对设置;所述磁场调节器设置在所述靶材远离所述基台的一面;所述溅射腔体用于密封所述基台、靶材和磁场调节器,所述磁场调节器包括第一腔体、至少两个磁体以及磁体间距控制模块;所述至少两个磁体设置在所述第一腔体内,所述两个磁体的顶部的磁极相反;所述磁体间距控制模块连接两个所述磁体,并控制所述两个磁体中的其中一个磁体或两个磁体进行移动,以改变两个磁体之间的间距;其中,所述磁场调节器还包括升降结构,所述升降结构设置在进行移动的所述磁体下,以控制所述磁体在于所述靶材垂直的方向上进行移动。
6.可选的,所述两个磁体分别为第一磁体和第二磁体,所述磁体间距控制模块包括第一固定结构和第一间距控制结构,所述第一固定结构用于固定所述第一磁体,所述第一间距控制结构包括第一螺杆、第一螺母和第一伺服电机;所述第一固定结构上设置有两个滑槽,所述第一螺杆的两端设置在所述两个滑槽内;所述第一螺母设置在所述第一螺杆上,并与所述第二磁体连接;所述第一伺服电机驱动所述第一螺母以带动所述第二磁体向所述第一磁体做往复运动;所述升降结构设置在所述第一伺服电机下,在所述第一间距控制结构控制所述第二磁体做往复运动的同时控制所述第一间距控制结构和所述第二磁体做升降运动。
7.可选的,所述两个磁体分别为第一磁体和第二磁体,所述磁体间距控制模块包括第一固定结构、第一板、第一间距控制结构和第二间距控制结构;所述升降结构包括第一升降结构和第二升降结构;所述第一间距控制结构包括第一螺杆、第一螺母和第一伺服电机;
所述第二间距控制结构包括第二螺杆、第二螺母和第二伺服电机;所述第一固定结构上设置有两个滑槽,所述第一板上设置有对称的两个滑槽,所述第一螺杆的一端设置在所述第一固定结构的一个滑槽内,另一端设置在所述第一板上的一个滑槽内;所述第二螺杆的一端设置在所述第一固定结构的一个滑槽内,另一端设置在所述第一板上的一个滑槽内;所述第一螺母设置在所述第一螺杆上,并与所述第二磁体连接;所述第二螺母设置在所述第二螺杆上,并与所述第一磁体连接;所述第一伺服电机驱动所述第一螺母以带动所述第二磁体向所述第一磁体做往复运动;所述第一升降结构设置在所述第一伺服电机下,在所述第一间距控制结构控制所述第二磁体做往复运动的同时控制所述第一间距控制结构和所述第二磁体做升降运动;所述第二伺服电机驱动所述第二螺母以带动所述第一磁体向所述第二磁体做往复运动;所述第二升降结构设置在所述第二伺服电机下,在所述第一间距控制结构控制所述第二磁体做往复运动的同时控制所述第二间距控制结构和所述第一磁体做升降运动。
8.可选的,所述磁场调节器包括第三磁体,所述第三磁体设置在所述第一固定结构上,所述第二磁体位于所述第一磁体和所述第三磁体之间,所述第二磁体的顶部的磁极与所述第一磁体的顶部的磁极相反,所述第一磁体的顶部的磁极和第三磁体的顶部的磁极相同,所述第一磁体和所述第三磁体的磁场强度相同。
9.可选的,所述磁场调节器包括第三磁体,所述第三磁体固定设置在所述第一板上,所述第三磁体位于所述第一磁体和所述第二磁体之间,所述第一磁体的顶部的磁极与所述第三磁体的顶部的磁极相反,所述第一磁体的顶部的磁极与所述第二磁体的顶部的磁极相同。
10.可选的,所述第一磁体、第二磁体和第三磁体的磁场强度相同。
11.可选的,所述磁控溅射装置还包括第四磁体和第五磁体,所述第五磁体和第四磁体固定设置在所述第一固定结构上,所述第二磁体设置在所述第三磁体和所述第五磁体之间,所述第一磁体设置在所述第四磁体和第三磁体之间;其中,所述第三磁体顶部的磁极和所述第四磁体的顶部的磁极相同,所述第三磁体的顶部的磁极和第五磁体的顶部的磁极相同,所述第一磁体顶部的磁极和第二磁体顶部的磁极相同,所述第一磁体顶部的磁极与所述第三磁体顶部的磁极相反。
12.本技术还公开了一种用于如上任一所述的磁控溅射装置的控制方法,包括步骤:
13.启动第一伺服电机,带动第二磁体在第一螺杆上做往复运动;
14.启动第一升降结构,调整所述第二磁体的高度;以及
15.切断磁控溅射装置的电源,溅射结束,关闭第一伺服电机和第二伺服电机。
16.可选的,所述控制方法还包括步骤:
17.启动第二伺服电机,带动第一磁体在第二螺杆上做往复运动;以及
18.启动第二升降结构,调整所述第一磁体的高度。
19.可选的,所述控制方法还包括步骤:
20.启动所述旋转结构带动所述第一磁体、第二磁体、第一伺服电机和第二伺服电机进行旋转。
21.相对于固定不动的磁体的方案来说,本技术在第一腔体放置至少两个磁体,使得两个磁体形成有与靶材相垂直大量磁力线,且磁体之间形成的磁场是可以进行变化的磁
场,如此靶材溅射的时候由于受到磁场的强度不同,从而改善靶材指定区域溅射量少,靶材整体利用率低的问题。
附图说明
22.所包括的附图用来提供对本技术实施例的进一步的理解,其构成了说明书的一部分,用于例示本技术的实施方式,并与文字描述一起来阐释本技术的原理。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。在附图中:
23.图1是本技术的第一实施例中的磁控溅射装置的结构示意图;
24.图2是本技术的第二实施例中的磁场调节器的结构示意图;
25.图3是本技术的第二实施例中的第二磁体的移动示意图(a);
26.图4是本技术的第二实施例中的第二磁体的移动示意图(b);
27.图5是本技术的第二实施例中的第二磁体的移动示意图(c);
28.图6是本技术的第二实施例中的第二磁体的移动示意图(d);
29.图7是本技术的第三实施例中的磁场调节器的结构示意图;
30.图8是本技术的第四实施例中的磁场调节器的结构示意图;
31.图9是本技术的第五实施例中的磁场调节器的结构示意图;
32.图10是本技术的第六实施例中的磁控溅射装置的控制方法流程示意图。
33.其中,20、靶材;30、基台;40、溅射腔体;50、基片;100、磁场调节器;;110、第一腔体;111、第一腔体壁;120、磁体;121、第一磁体;122、第二磁体;123、第三磁体;124、第四磁体;135、第五磁体;130、磁体间距控制模块;131、第一固定结构;132、第一间距控制结构;133、第二间距控制结构;134、第二固定结构;135、滑槽;136、第一板;140、螺杆;141、第一螺杆;142、第二螺杆;150、螺母;151、第一螺母;152、第二螺母;160、旋转结构;170、伺服电机;171、第一伺服电机;172、第二伺服电机;180、联动轴;190、升降结构;191、第一升降结构;192、第二升降结构。
具体实施方式
34.需要理解的是,这里所使用的术语、公开的具体结构和功能细节,仅仅是为了描述具体实施例,是代表性的,但是本技术可以通过许多替换形式来具体实现,不应被解释成仅受限于这里所阐述的实施例。
35.在本技术的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示相对重要性,或者隐含指明所指示的技术特征的数量。由此,除非另有说明,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征;“多个”的含义是两个或两个以上。术语“包括”及其任何变形,意为不排他的包含,可能存在或添加一个或更多其他特征、整数、步骤、操作、单元、组件和/或其组合。
36.另外,“中心”、“横向”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系的术语,是基于附图所示的方位或相对位置关系描述的,仅是为了便于描述本技术的简化描述,而不是指示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
37.此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,或是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
38.下面参考附图和可选的实施例对本技术作详细说明。
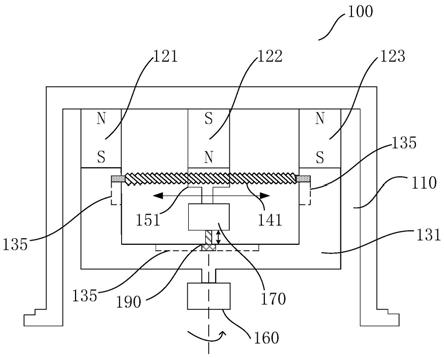
39.图1是本技术的第一实施例中的磁控溅射装置的结构示意图;如图1所示,作为本技术的第一实施例,公开了一种磁控溅射装置10,包括基台30、靶材20、溅射腔体40和磁场调节器100;所述基台30用于放置基片50;所述靶材20与所述基台30相对设置;所述磁场调节器100设置在所述靶材20远离所述基台30的一面;所述溅射腔体40用于密封所述基台30、靶材20和磁场调节器100,所述磁场调节器100包括第一腔体110、至少两个磁体120和磁体间距控制模块130,第一腔体110包括第一腔体壁111,所述第一腔体壁111的外壁上放置所述靶材20,两个磁体120设置在所述第一腔体110内,所述两个磁体120形成有与所述靶材20相垂直的大量磁力线,磁体间距控制模块130控制两个磁体120之间的间距变化;其中,所述磁体间距控制模块130通过带动所述两个磁体120中的其中一个磁体120或两个磁体120进行移动,以改变所述两个磁体120之间的间距,在两个磁体之间形成磁场大小不断变化的磁场。
40.一般的,两个磁体120在同一水平方向上排列设置,且高度相同,磁性大小相同,两块磁体120可以为同样规模,同样材质制得的形状大小相同的两个磁体120,通过磁体间距控制模块130不断改变间距,如此两个磁体120之间的磁场不断产生变化,那么在靶材20的不同位置的磁场强度发生变化,不会出现在靶材20中间区域溅射量少,其他区域溅射量大的情况发生,从而改善因为磁场不变导致靶材20溅射不均匀的问题,当然两个磁体的磁强大小也可以不同。
41.除了考虑到水平方向的磁场变化,本技术还设置有升降结构190,所述升降结构190设置在进行水平移动的所述磁体120下,以控制水平移动的所述磁体120进行上下运动,在两个磁体120之间的水平距离发生改变的同时,运动的磁体120的高度也不断变化;具体的,所述两个磁体120分别为第一磁体121和第二磁体122,所述磁体间距控制模块130包括第一固定结构131和第一间距控制结构132,所述第一固定结构131用于固定所述第一磁体121,所述第一间距控制结构132包括第一螺杆141、第一螺母151和第一伺服电机170;
42.所述第一固定结构上设置有两个滑槽135,两个滑槽135以旋转结构的轴心对称设置,滑槽在竖直方向上的长度大于滑槽在水平方向上的长度,所述第一螺杆141的两端设置在所述两个滑槽135内;所述第一螺母151设置在所述第一螺杆141上,并与所述第二磁体122连接;所述第一伺服电机170驱动所述第一螺母141以带动所述第二磁体122向所述第一磁体121做往复运动;所述升降结构190设置在所述第一伺服电机170下,第一固定结构131对应升降结构190处也设置有滑槽135,升降结构190一端与第一伺服电机170固定,另一端放置在第一固定结构131对应的滑槽135内,在所述第一间距控制结构132控制所述第二磁体122做往复运动的同时控制所述第一间距控制结构132和所述第二磁体122做升降运动。
43.第一磁体121和第二磁体122形成垂直与靶材20的磁场,在溅射过程中,第二磁体122朝第一磁体121进行往复运动,随着间距的改变,两个磁体120之间的磁场发生变化,如此对应靶材20的同一区域,在靶材20溅射的时候由于受到磁场的强度不同,从而改善靶材
20中间区域溅射量少,靶材20整体利用率低的问题,在水平方向的磁场变化的同时,竖直方向上的磁场也产出变化,从而更加具有针对性的改变靶材20的均匀度。
44.所述第一腔体110包括第一腔体内壁,所述第一腔体内壁平行于所述螺杆,所述第二磁体的顶端距离所述第一腔体内壁的距离小于等于2cm,避免磁体与第一腔体的内壁进行摩擦,影响磁体的使用寿命。
45.进一步的,所述磁场调节器100还包括旋转结构160,所述旋转结构160设置在所述第一固定结构131下,带动所述在所述第一固定结构131进行旋转,在改变磁体之间的间距的同时,使得所有的磁体120进行旋转,如此对应的圆柱状的靶材20的整体的均匀度可以进一步的提高。
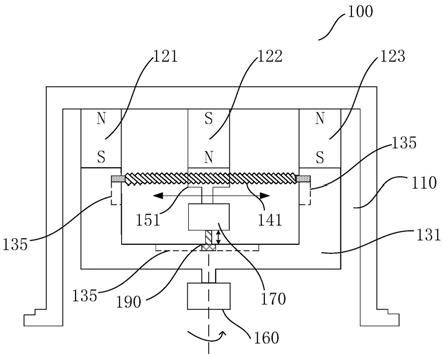
46.图2是本技术的第二实施例中的磁场调节器的结构示意图,如图2所示,作为本技术的第二实施例,与上述实施例不同的是,所述磁场调节器还包括第三磁体123,所述第三磁体123设置在所述第一固定结构131上,所述第二磁体122位于所述第一磁体121和所述第三磁体123之间,所述第二磁体的顶部的磁极与第一磁体和第三磁体的顶部的磁极相反,所述第一磁体121和第三磁体123的磁场强度相同,第二磁体122的磁场强度与第一磁体123的磁场强度可以相同也可以不同。
47.中间的第二磁体122连接在第一螺母141上,第一螺母141与第一伺服电机171和第一螺杆151相连,第一螺杆151的螺杆端尾深入到第一固定结构131的两侧滑槽135内,第一伺服电机171与升降结构190相连,升降结构190底端伸入第一固定结构131的中间滑槽135内,第二磁体122可以相对第一螺杆151做直线运行,同时第二磁体122受升降结构190控制做上下升降运动。两侧磁体与旋转结构相连,旋转结构190带动整个磁体组(包括中间磁体和两侧磁体)做匀速旋转运动。同时,第一伺服电机171控制第一螺母141带动中间磁体做水平直线运动,升降结构190带动中间磁体做竖直升降运动,实现中间磁体的三维运动。
48.其中,磁体组中的小磁体可以为多个,满足磁极交叉分布,但小磁体个数最好为奇数个,偶数个磁体时,磁场线不对称;三个磁体作为示例性讲解,通过第一伺服电机控制中间磁体在第一螺杆151上相对两侧磁体做周期性往复运动,并且通过升降结构190控制中间磁体在竖直方向上做升降运动,再叠加上整个磁体组的旋转运动,实现中间磁体在有限空间内做三维运动,并且可以精确控制每一维运动的频率,从而可以根据测试结果确定中间磁体的最佳运动轨迹,并在反应时控制中间磁体以最佳运动轨迹运动。最终,实现磁场线随中间磁体的位置变化而周期性变化,变化的磁场线束缚电子在整个区域分布更均匀,电离产生的高能粒子均匀轰击靶材整个表面。通过本提案装置,靶材溅射使用后,因溅射产生的环状沟槽基本消失。
49.图3是本技术的第二实施例中的第二磁体的移动示意图(a);图4是本技术的第二实施例中的第二磁体的移动示意图(b);图5是本技术的第二实施例中的第二磁体的移动示意图(c);图6是本技术的第二实施例中的第二磁体的移动示意图(d);与中间磁体只做水平运动的方案相比,本方案的磁感线变化更丰富,能够使靶材更加均匀;如图3至6所示所示,中间磁体1运动到不同位置时的磁场线分布不断变化,图3显示了中间磁体运动到边缘底的磁场线分布,图4显示了中间磁体运动到中心底的磁场线分布,图5显示了中间磁体运动到边缘顶的磁场线分布,图6显示了中间磁体运动到正中心的磁场线分布;控制中间磁体相对两侧磁体水平方向的周期性往复运动和竖直方向的升降运动,再加上整个磁体组的旋转运
动,实现中间磁体的三维运动可控。在增加靶材利用率的同时,延长了磁控溅射设备的运行时间,降低了产品成本;并且该控制装置可在现有设备的基础上改进,不影响溅射机台整体结构,技术上易实现。
50.图7是本技术的第三实施例中的磁场调节器的结构示意图;作为本技术的第三实施例,如图7所示,所述两个磁体分别为第一磁体121和第二磁体122,所述磁体间距控制模块130包括第一固定结构131、第一板136、第一间距控制结构132和第二间距控制结构133;所述升降结构190包括第一升降结构191和第二升降结构192;所述第一间距控制结构132包括第一螺杆141、第一螺母151和第一伺服电机171;所述第二间距控制结构133包括第二螺杆142、第二螺母152和第二伺服电机172。
51.其中,所述第一固定结构131上设置两个滑槽135,两个滑槽135关于中间的第一板136对称,所述第一板136上设置有对称的两个滑槽,所述第一螺杆141的一端设置在所述第一固定结构131的一个滑槽135内,另一端设置在所述第一板136上的一个滑槽135内;所述第二螺杆142的一端设置在所述第一固定结构131的一个滑槽135内,另一端设置在所述第一板136上的一个滑槽135内;所述第一螺母151设置在所述第一螺杆141上,并与所述第二磁体122连接;所述第二螺母152设置在所述第二螺杆142上,并与所述第一磁体121连接。
52.所述第一伺服电机171驱动所述第一螺母151以带动所述第二磁体122向所述第一磁体121做往复运动;所述第一升降结构191设置在所述第一伺服电机171下,在所述第一间距控制结构133控制所述第二磁体122做往复运动的同时控制所述第一间距控制结构132和所述第二磁体122做升降运动;所述第二伺服电机172驱动所述第二螺母以带动所述第一磁体向所述第二磁体做往复运动;所述第二升降结构设置在所述第二伺服电机172下,在所述第一间距控制结构132控制所述第二磁体122做往复运动的同时控制所述第二间距控制结构133和所述第一磁体121做升降运动。
53.所述两个磁体超同一方向或不同方向进行移动,两个磁体可以相对移动,也可以朝同一方向移动,且沿同一方向移动时,两者的移动速度可以相同也可以不同,可以是两个磁体的磁场位置产生变化,或者磁场大小产生变化,所述旋转结构160设置在所述第一固定结构下,带动所述在所述第一固定结构进行旋转,在改变磁体之间的间距的同时,使得所有的磁体进行旋转,如此对应的圆柱状的靶材20的整体的均匀度可以进一步的提高。
54.图8是本技术的第四实施例中的磁场调节器的结构示意图;作为本技术的第四实施例,如图8所示,与上述实施例不同的是,所述磁控溅射装置包括第三磁体123,所述第三磁体123固定设置在所述第一板136上;通过设置三个磁体120,三个磁体120在同一水平高度上,且使中间的磁体固定不动,另外两个磁体120向中间的磁体往复运动,从而使得两两磁体120之间的磁场强度不断产生变化,溅射时可以靶材20更加均匀。
55.其中,所述第三磁体122可以为电磁体120,所述电磁体120的磁性与第一磁体121和第三磁体123的磁极相反,通过电流的大小控制第二磁体122的大小,如此使得第二磁体122与第一磁体121和第三磁体123形成的磁场可以随时根据电流大小进行变化。
56.图9是本技术的第五实施例中的磁场调节器的结构示意图,为了使得靶材更加均匀,如图9所示,所述磁场调节装置100还可以增加第四磁体124和第五磁体125,第五磁体125和第四磁体固定设置在所述第一固定结构131上,所述第二磁体122在所述第三磁体123和第五磁体125之间,第一磁体121设置在所述第四磁体124和第三磁体123之间。
57.其中,所述第三磁体123、第四磁体124、和第五磁体125的磁性相同,第四磁体121和第二磁体122的磁性相同,第一磁体121与第二磁体122相同;第一磁体122在所述第四磁体124和所述第三磁体123之间做往复运动,所述第二磁体122在所述第三磁体123和所述第五磁体125之间做往复运动,如此在第四磁体124、第三磁体123和第五磁体125在固定的情况下,通过移动第一磁体121和第二磁体122,使得各个磁体120之间的磁场都产生变化,从而使得靶材溅射时更加均匀。
58.本实施例中,可以使得第一磁体和第二磁体固定不动,使第三磁体、第四磁体和第五磁体进行移动,如此多个磁体进行运动,磁场的变化范围更大,使得靶材更加均匀。
59.图10是本技术的第六实施例中的磁控溅射装置的控制方法流程示意图。作为本技术的另一实施例,如图10所示,公开了一种用于上述任一磁控溅射装置的控制方法,包括步骤:
60.s1:启动第一伺服电机,带动第二磁体在第一螺杆上做往复运动;
61.s2:启动第一升降结构,调整所述第二磁体的高度;以及
62.s3:切断磁控溅射装置的电源,溅射结束,关闭第一伺服电机和第二伺服电机。
63.进一步的,所述控制方法还包括步骤:
64.s4:启动第二伺服电机,带动第一磁体在第二螺杆上做往复运动;以及
65.s5:启动第二升降结构,调整所述第一磁体的高度。
66.在进行上述任一步骤的同时,还可以进行以下步骤:
67.启动所述旋转结构带动所述第一磁体、第二磁体、第一伺服电机和第二伺服电机进行旋转。
68.其中,第一伺服电机和第二伺服电机可以同时启动,且可以使用相同功率的电机,保证第一磁体和第二磁体的同步运动,第一升降结构和第二升降结构也可以同时启动,升降的高度同步,从而使得靶材受到的磁场更加均匀,当然也可以不同步进行,可以根据靶材的实际情况进行调整。
69.需要说明的是,本方案中涉及到的各步骤的限定,在不影响具体方案实施的前提下,并不认定为对步骤先后顺序做出限定,写在前面的步骤可以是在先执行的,也可以是在后执行的,甚至也可以是同时执行的,只要能实施本方案,都应当视为属于本技术的保护范围。
70.需要说明的是,本技术的发明构思可以形成非常多的实施例,但是申请文件的篇幅有限,无法一一列出,因而,在不相冲突的前提下,以上描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例,各实施例或技术特征组合之后,将会增强原有的技术效果
71.以上内容是结合具体的可选实施方式对本技术所作的进一步详细说明,不能认定本技术的具体实施只局限于这些说明。对于本技术所属技术领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。