1.本发明属于汽车自动控制技术领域,特别涉及一种自动驾驶汽车遥控控制系统。
背景技术:
2.随着自动驾驶技术的突飞猛进,自动驾驶取代人工驾驶已经是大势所趋,在一些无方向盘的高度智能驾驶汽车上有三种控制方式,分别为:自动驾驶控制器控制,远程网络控制和近程遥控手柄控制,而遥控手柄控制可作为对整车控制的一种补充,在近距离可视范围内对汽车进行人工控制。随着图像处理技术和人工智能技术的发展,自动驾驶技术取得了较大的突破,自动驾驶车辆逐渐应用于一些场景,例如校园或者园区等半封闭式环境。自动驾驶车辆是由其自动驾驶系统,根据摄像头、激光雷达以及毫米波雷达等采集到的道路信息控制底盘,实现对小车行驶过程的控制。但是,自动驾驶车辆可能发生不可期望的运行,此时自动驾驶车辆在自动驾驶系统的控制行驶下可能会发生车辆损坏或者次生伤害,从而降低自动驾驶车辆的安全性。
技术实现要素:
3.本发明的目的在于提供一种自动驾驶汽车遥控控制系统和方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种自动驾驶汽车遥控控制系统,包括设置于自动驾驶车辆上的遥控控制器,所述遥控控制器包括电源模块、手柄接收器模块、控制模块和can收发模块,其中电源模块用于降压和稳压,将汽车整车9
‑
16的电压转换为各模块所需的5v电压和3.3v电压,并将输出电压稳定在
±
0.1v以内;手柄接收器模块用于将遥控手柄发来的无线信号转换为pwm信号并传递给控制模块;控制模块用于处理输入的pwm信号,并通过spi通信将整车控制数据输出给can收发模块;can收发模块用于将控制模块发来的数据转换为can通信模式的数据传递到整车can总线,从而实现使用遥控手柄对整车进行近程控制;所述自动驾驶汽车遥控控制系统还包括遥控手柄,所述遥控手柄与遥控控制器中的手柄接收器模块进行无线通信,用于控制所述自动驾驶车辆的行驶状态,所述遥控手柄上共有8个按钮和摇杆的操作通道,按钮和摇杆的操作通道与手柄接收器模块输出的通道对应,所述操作摇杆位于遥控手柄正面,所述操作按钮位于手柄侧面顶部。
5.作为优选,所述操作摇杆包括摇杆一和摇杆二,所述摇杆一和摇杆二设置于所述遥控手柄上的不同位置,所述摇杆一用于控制所述自动驾驶车辆加减速,所述摇杆二用于控制所述自动驾驶车辆的转向;所述操作按钮包括按钮一、按钮二、按钮三和按钮四,分别设置于遥控手柄侧面顶部的不同位置,所述按钮一为使能控制按钮,所述按钮二位档位控制按钮,所述按钮三为紧急情况判断按钮,按钮四为接管开关;所述遥控手柄上各类操作表现在摇杆一、摇杆二和按钮一、按钮二、按钮三和按钮四输出为一段连续的、频率固定的、占空比变化的pwm波形信号,当遥控手柄上的按钮或摇杆发生物理变化时,对应通道的pwm占
空比将发生变化,pwm波形的高电平电压为5v,低电平电压为0,手柄接收器模块接收信号并传给控制模块后,控制模块检测控制模块对应通道的8个引脚的pwm波形信号的占空比即可得出此时遥控手柄做了何种操作,根据操作将控制模块发来的数据转换为can通信模式的数据传递到整车can总线控制整车的运行。
6.作为优选,所述按钮二能对自动驾驶汽车进行p档、d档和r档之间的切换;作为优选,按钮一和按钮二位三段式按钮,按钮三和按钮四为弹出式按钮,按钮三用于判断遥控手柄是否与遥控控制器失联,从而执行相应的紧急情况处理,防止手柄意外失联造成车辆失控,按钮四用于接管车辆,将自动驾驶车辆由自动驾驶模式切换至被遥控手柄控制模式;作为优选,所述控制模块使用的单片机为stm32f103rbt6;作为优选,所述遥控手柄与遥控控制器中的手柄接收器模块之间采用5g通信;本发明提供一种自动驾驶汽车遥控控制方法,包括:步骤一:在所述自动驾驶车辆处于自动驾驶模式的情况下,按下遥控手柄上的按钮四,所述自动驾驶车辆接收遥控手柄发出的接管车辆指令;步骤二:安装于自动驾驶车辆上的手柄接收器模块接收并响应遥控手柄发出的接管车辆指令;步骤三:控制模块控制所述自动驾驶车辆由自动驾驶模式切换至遥控手柄控制模式;步骤四:在遥控手柄控制模式的情况下,所述手柄接收器模块持续接收遥控手柄发送的控车指令,控制模块持续传送控车数据至can收发模块;步骤五:can收发模块持续将控制模块发来的数据转换为can通信模式的数据传递到整车can总线,实现使用遥控手柄对整车进行近程控制。
7.作为优选,在所述手柄控制模式中再次按下按钮四,则所述自动驾驶车辆切换至自动驾驶模式;作为优选,在所述手柄控制模式中,可通过弹出式按钮三的状态判断遥控手柄是否失联,从而执行紧急停车指令。
8.与现有技术相比,本发明的有益效果是:因为采用遥控手柄控制自动驾驶车辆的行车状态技术手段,所以克服了自动驾驶车辆的安全性低的技术问题,进而达到降低自动驾驶车辆发生车辆损坏或者次生伤害的可能性,进而提升自动驾驶车辆的安全性。另外,通过摇杆一和摇杆二控制自动驾驶车辆的前进和转向,使得转向和加减速分开控制,可以降低操作人员对自动驾驶车辆的误操作,进一步提升自动驾驶车辆的安全性。通过三段式按钮可以实现自动驾驶车辆的档位在前进档位和倒车档位之间进行切换,从而使得自动驾驶车辆在手柄控制模式下的控制逻辑更加符合车辆的行车逻辑,进一步提升自动驾驶车辆的安全性。
附图说明
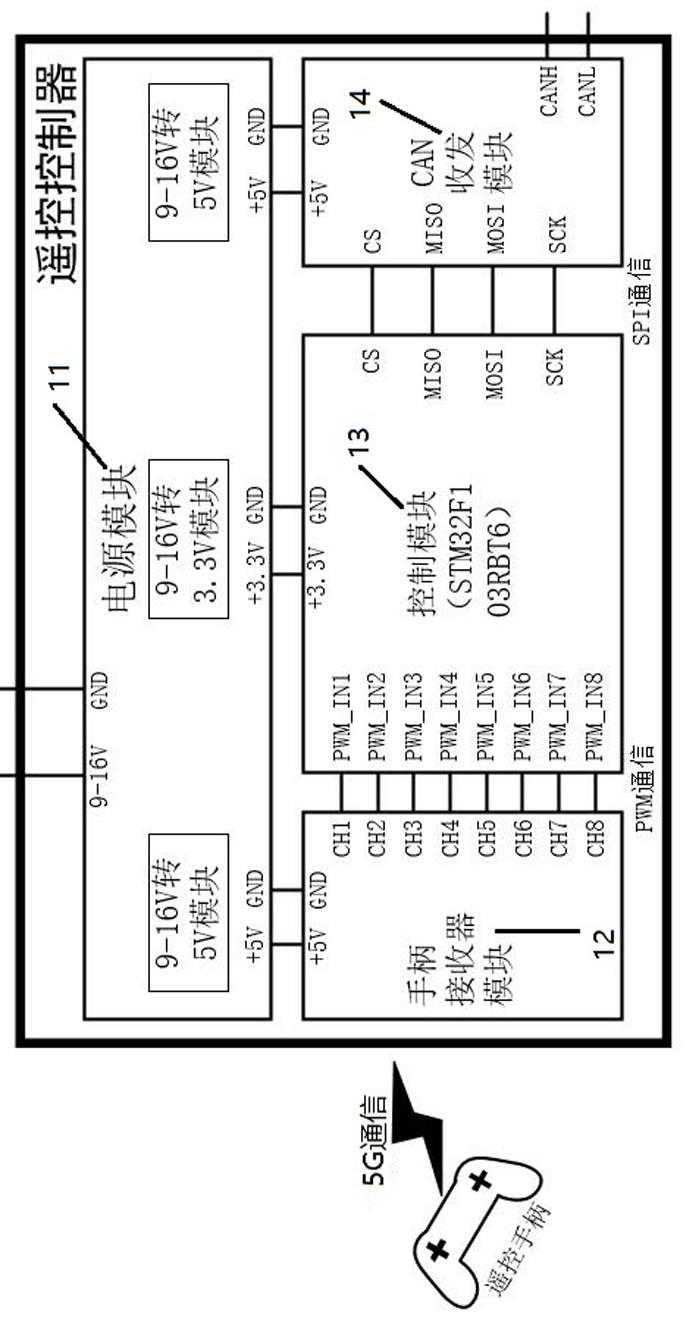
9.图1为本发明系统的控制器结构示意图;图2为本发明的遥控手柄结构图;
图3为本发明的手柄接收器模块输出pwm波与手柄操作的关系图表;图4为本发明的方法流程图。
具体实施方式
10.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
11.如图1所示,本发明实施例提供一种自动驾驶汽车遥控控制系统,包括设置于自动驾驶车辆上的遥控控制器1,所述遥控控制器1包括电源模块11、手柄接收器模块12、控制模块13和can收发模块14,其中电源模块11用于降压和稳压,将汽车整车9
‑
16的电压转换为各模块所需的5v电压和3.3v电压,并将输出电压稳定在
±
0.1v以内;手柄接收器12模块用于将遥控手柄发来的无线信号转换为pwm信号并传递给控制模块;控制模块13用于处理输入的pwm信号,并通过spi通信将整车控制数据输出给can收发模块14;can收发模块14用于将控制模块13发来的数据转换为can通信模式的数据传递到整车can总线,从而实现使用遥控手柄对整车进行近程控制,其中所述控制模块使用的单片机为stm32f103rbt6。
12.如图2所示,本发明实施例提供一种自动驾驶汽车遥控控制系统,还包括遥控手柄2,所述遥控手柄2与遥控控制器中1的手柄接收器模块12进行无线通信,用于控制所述自动驾驶车辆的行驶状态,所述遥控手柄2上共有8个按钮和摇杆的操作通道,所述操作通道为ch1、ch2、ch3、ch4、ch5、ch6、ch7、ch8,按钮和摇杆的操作通道与手柄接收器模块12输出的通道对应。
13.其中所述遥控手柄2与遥控控制器1中的手柄接收器模块12之间采用5g通信。
14.所述操作摇杆包括摇杆一21和摇杆二22,所述摇杆一和摇杆二设置于所述遥控手柄2正面不同位置;所述操作按钮包括按钮一23、按钮二24、按钮三25和按钮四26,分别设置于遥控手柄2侧面顶部的不同位置。
15.其中其中ch1与ch2为摇杆一21对应的通道,ch3与ch4为摇杆二22对应的通道,ch5与ch7为三段式按钮一23和三段式按钮二24对应的通道,ch8与ch6为弹出式按钮三25和弹出式按钮四26对应通道。
16.遥控手柄2上各类操作表现在在摇杆一、摇杆二和按钮一、按钮二、按钮三和按钮四输出为一段连续的、频率固定的、占空比变化的pwm波形信号,当遥控手柄2上的按钮或摇杆发生物理变化时,对应通道的pwm占空比将发生变化,pwm波形的高电平电压为5v,低电平电压为0,因此根据遥控手柄2发出的指令,手柄接收器模块接收指令信号并传给控制模块后,控制模块检测控制模块对应通道的8个引脚的pwm波形信号的占空比即可得出此时遥控手柄做了何种操作,根据操作将控制模块发来的数据转换为can通信模式的数据传递到整车can总线控制整车的运行。
17.根据遥控手柄2的特性及操作车辆的需要,如图3所示,将ch1、ch4、ch5、ch6、ch7、ch8分别用于整车的加减速控制、转向控制、使能控制、接管控制、档位控制和手柄紧急情况判断功能。
18.根据摇杆或按钮及pwm波形变化情况,将各功能对应pwm波形做如下定义如图3所示:1.将摇杆一21分为三段,当摇杆一21由中心向上推的过程中,ch1通道的pwm波形占空比由50%—100%变化;摇杆一21在中心位置时候,ch1通道的pwm波形占空比为50%;摇杆一21由中心向下推动的过程中,ch1通道的pwm波形占空比由50%—0变化。根据这一特点,又由于实际有较小的误差,因此可将pwm波形由45%—0定义为刹车,45%
‑
55%定义为既不加速也不刹车,55%—100%定义为加速。
19.2.将摇杆二22也分为三段,当摇杆二22自中心点向左推过程中,ch4通道pwm波形占空比由50%—0变化;静止时50%;由中心点向右推为50%—100%变化,因此可将45%—0定义为左转,45%
‑
55%定义为直行,55%—100%定义为右转。
20.3.将按钮一23定义为使能功能按钮,按到最下端时候,ch5通道发送的pwm占空比为20%,按到中端为50%,按到上端为80%,所以通过该按键可以使遥控控制器1拥有三种状态:上端为使能模式、中端为不使能模式、下端为不发can模式,使能模式下遥控手柄2可以正常控制车辆;不使能模式下遥控控制器1正常向整车can总线上发送报文,但是不能控制;不发can模式下遥控手柄2既不能控制车辆,遥控控制器1也不能向整车can发送报文。
21.4.将按钮二24定义为档位功能按钮,如同ch5通道一样,将ch7通道的上端定义为d档,中端定义为p档,下端定义为r档。
22.5.将弹出式按钮三25定义为紧急情况判断按钮,正常情况下,按下ch8按钮,该通道的pwm波形占空比为20%;松开按钮,占空比为80%;失联时为50%。由于遥控手柄2与遥控控制器1的连接有时会发生意外断开的情况,因此通过该通道的占空比是否为50%,判断遥控手柄2是否与遥控控制器1失联,从而执行相应的紧急情况处理,防止遥控手柄2意外失联造成车辆失控。
23.6.将弹出式按钮四26四定义为接管控制按钮,正常情况下,按下ch6按钮,该通道的pwm波形占空比为20%;松开按钮,占空比为80%;按下按钮四26时,向自动驾驶车辆发送接管指令;松开按钮四26时,退出手柄控制模式。
24.通过上述定义,通过一定的控制逻辑,即可使can收发模块14向整车发出控车的报文,从而达到使用遥控手柄2控制车辆的目的。
25.如图4所示,本发明实施例提供一种自动驾驶汽车遥控控制方法,包括:步骤s1:在所述自动驾驶车辆处于自动驾驶模式的情况下,按下遥控手柄上的按钮四,所述自动驾驶车辆接收遥控手柄发出的接管车辆指令;步骤s2:安装于自动驾驶车辆上的手柄接收器模块接收并响应遥控手柄发出的接管车辆指令;步骤s3:控制模块控制所述自动驾驶车辆由自动驾驶模式切换至遥控手柄控制模式;步骤s4:在遥控手柄控制模式的情况下,所述手柄接收器模块持续接收遥控手柄发送的控车指令,控制模块持续传送控车数据至can收发模块;
步骤s5:can收发模块持续将控制模块发来的数据转换为can通信模式的数据传递到整车can总线,实现使用遥控手柄对整车进行近程控制。
26.在本实施例中,在所述手柄控制模式中再次按下按钮四26,则所述自动驾驶车辆切换由手柄控制模式至自动驾驶模式;在本实施例中,在所述手柄控制模式中,可通过弹出式按钮三25的状态判断遥控手柄是否失联,从而执行紧急停车指令。
27.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
28.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
29.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。