1.本发明涉及追光灯控制技术领域,更具体地,涉及一种适用于舞台上的追光灯自动控制系统及追光灯自动控制方法。
背景技术:
[0002]“追光灯”是用于展现舞台艺术中必不可少的重要照明灯具,传统“追光灯”的主要功能是在导演的指挥下,由工作人员控制在舞台上产生一个明亮的“一个硬而实的光圈”,在舞台上随着演员移动而移动,追光灯的使用可以根据节目的需要展现各种舞台艺术和体验,从而达到突出舞台重点,烘托环境气氛灯等目的。
[0003]
市场上大多数的追光灯都必须由专业人员,根据演出的需求,实现灯光追随,同时追光灯是高功率射灯,其散热系统可能涉及操作人员的安全问题。因此,操作追光灯是专业且有一定风险的工作。
[0004]
目前市场上出现了一些追光灯的控制系统、追踪系统,试图解决追光灯的风险问题,主要分为以下几种:
[0005]
多个压力传感器检测目标位置的舞台灯光自动跟踪系统。这类系统主要通过在舞台上布设多个检测装置(压力传感器)来实时检测目标的位置,最终控制灯光的照射方向,实现舞台灯光自动跟随目标运动,达到自动无人操作的目的。如专利号为cn201689343u的发明专利(舞台灯光自动跟踪系统),能够实现自动跟踪目标功能。这类系统的缺点是需要在舞台上布设压力传感器阵列,以及当跟踪的表演者双脚离开舞台上时,就会无法跟踪,同时也会受到舞台上其它有重量物体的干扰。
[0006]
利用摄像机检测目标并通过图像处理技术分析目标位置以及控制灯光自动跟踪的方法。这类系统的困难点在于鉴定目标,加上摄像机拍摄范围有限,需要多个摄像机拼接采集图像,系统庞大,需要连接电脑服务器才能及时处理多路视频数据。有的通过在被跟踪物体上携带红外发射器作为信号标记,不过存在的问题是靠被跟踪物体本身或其它物体产生的标记有时是看不见的,因此必须要多个标记(红外光发射器)附加到被跟踪的物体以防发生该问题。另外,当使用环境中有来自非红外光发射器的红外光时,如有夜视功能的监控摄像头,将导致被跟踪物体的跟踪失败。
[0007]
现有的舞台灯光定位跟踪系统,包括射灯及用于控制射灯的射灯电路控制系统,射灯能根据舞台对象进行自动跟踪功能,但是该舞台灯仅仅能够对灯光角度进行控制,无法同时实现对灯光效果的控制,适用性不强。
技术实现要素:
[0008]
本发明旨在克服上述现有技术中存在的需要借助电脑上位机软件来进行定位控制以及不能同时控制灯光效果的问题,提供一种追光灯自动控制系统和追光灯自动控制方法。该追光灯自动控制系统是利用uwb超宽带测距定位技术,将目标的定位坐标数据转换成舞台灯的照射角度,再结合辅控器控制输出灯光效果,利用信号线连接一台或多台追光灯,
实现灯光自动追踪目标的功能的。
[0009]
本发明采取的技术方案是,提供一种追光灯自动控制系统,包括标签、基站、主控器和辅控器,标签与目标绑定在一起,发送目标位置信号;基站与标签通信连接,接收目标位置信号;主控器包括角度转换模块、协议转换模块和数据过滤模块,角度转换模块与基站通信连接,从而将目标位置信号转换为第一灯光角度控制信号;辅控器包括效果控制模块,效果控制模块发送灯光效果控制信号和第二灯光角度控制信号;效果控制模块依次通过协议转换模块、数据过滤模块与追光灯控制连接,协议转换模块用于将灯光效果控制信号和第二灯光角度控制信号解析并传送至数据过滤模块;角度转换模块通过数据过滤模块与追光灯控制连接;数据过滤模块用于过滤第二灯光角度控制信号,并将第一灯光角度控制信号和灯光效果控制信号传输至追光灯。
[0010]
本技术方案中,主控器以i.mx rt1052微处理器为主控芯片,集成cortex-m7内核,最高主频可达600mhz,外扩了32m sdram内存、8m qspi flash代码储存器、32m spi falsh数据储存器,外接7寸rgb触摸屏,支持以太网接口、dmx输入输出接口、tft卡接口、usb接口。
[0011]
其中,协议转换模块是经过iso3088芯片等器件将辅控器的dmx信号输入到主控芯片,主控芯片解析dmx协议,转换成控制灯具的通道数据,即灯光效果控制信号和第二灯光角度控制信号。
[0012]
角度转换模块是经过dp83848芯片等器件构成以太网接口,实时接收基站的测距数据,即目标位置信号,经过计算来确定标签的坐标位置,再转换成追光灯的投射角度,即第一灯光角度控制信号。
[0013]
数据过滤模块是经过主控器把控制追光灯的水平相对角度控制数据和垂直相对角度控制数据筛选,即过滤第二灯光角度控制信号,并替换成角度转换模块算出来的投射角度数据,即替换为第一灯光角度控制信号和灯光效果控制信号,并经过max14783芯片等器件,把dmx信号输出。
[0014]
本发明通过设置主控器,在主控器上集合角度转换模块、协议转换模块和数据过滤模块,从而不需要经过电脑上位机软件来进行定位控制、定位传输工作;另外,辅控器的设置,使得追光灯自动控制系统不仅能控制追光灯的转动角度,还可以根据实际需要控制追光灯的照射效果,适用性大大增强。
[0015]
进一步的,协议转换模块支持dmx512协议、dmx512a协议、rdm协议、acn协议、artnet协议、sacn协议、knx协议、dali协议和/或dsi协议中的至少一种。
[0016]
进一步的,角度转换模块与基站采用udp进行通信连接。
[0017]
进一步的,辅控器连接主控器,在辅控器上可以灵活控制追光灯的输出光效果,辅控器为ma或martin控台。
[0018]
进一步的,基站与标签通过时分多址通信连接。
[0019]
进一步的,追光灯是具有方向性的照明装置,可以是任意一种摇头电脑灯。
[0020]
更进一步的,基站用于测距定位,数量至少为四个,均布设置在追光场地的四周,可以通过增加基站数量来提高定位精度。
[0021]
更进一步的,标签数量为1-4个。标签可以自由移动,并分别与不同基站通信,通过计算电磁波在空中的飞行时间来确定标签与基站间的距离,再通过基站实时上传测距的数据给上述的主控器。
[0022]
更进一步的,追光灯数量为若干台,且追光灯数量≥标签数量,每台追光灯至少与一个标签相对应。每个标签都有一个追光灯相对应,这样能够实现同时追踪照射舞台上的多个目标;当需要突出舞台上的某一个目标时,只要控制多个追光灯同时照射该目标即可。
[0023]
本发明还提供了一种追光灯自动控制方法,由追光灯自动控制系统实现,包括以下步骤:
[0024]
s1,标签发送目标位置信号;
[0025]
s2,角度转换模块接收目标位置信号,并将目标位置信号转换为第一灯光角度控制信号;效果控制模块发送灯光效果控制信号和第二灯光角度控制信号;
[0026]
s3,数据过滤模块过滤第二灯光角度控制信号,然后将灯光效果控制信号和第一灯光角度控制信号传输至追光灯。
[0027]
本发明的技术构思为:超宽带(uwb)定位技术是一种传输速率高(最高可达1000mbps以上),发射功率较低,穿透能力较强并且是基于极窄脉冲的无载波无线定位技术。这种定位技术定位精度为厘米级,而且抗干扰能力非常强。
[0028]
背景技术中提到现有的多种追踪定位技术各有各的特点,但如果是运用在不稳定、复杂、干扰因素多的场合下,则本发明明显会具有较强的优势,能够实现对目标的精准定位,而且抗干扰能力强。
[0029]
与现有技术相比,本发明的有益效果为:
[0030]
1.本发明的追光灯自动控制系统能够在没有人的干预情况下,根据目标所在的位置,将灯光自动地打到目标上,同时还能根据需要调节灯光的效果,实现灯光的自动控制,适用性强;
[0031]
2.本发明不需要借助电脑上位机软件来进行定位控制;
[0032]
3.本发明能够实现对目标的精准定位,而且抗干扰能力强。
附图说明
[0033]
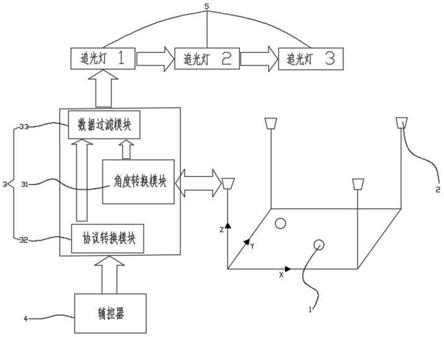
图1为本实施例的结构示意图。
[0034]
图号说明:1、标签;2、基站;3、主控器;4、辅控器;5、追光灯;31、角度转换模块;32、协议转换模块;33、数据过滤模块。
具体实施方式
[0035]
本发明附图仅用于示例性说明,不能理解为对本发明的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0036]
实施例1
[0037]
参考图1,本实施例提供的一种追光灯自动控制系统,包括标签1、基站2、主控器3和辅控器4,标签1与目标绑定在一起,发送目标位置信号;基站2与标签1通信连接,接收目标位置信号;主控器3包括角度转换模块31、协议转换模块32和数据过滤模块33,角度转换模块31与基站2通信连接,从而将目标位置信号转换为第一灯光角度控制信号;辅控器4包括效果控制模块,效果控制模块发送灯光效果控制信号和第二灯光角度控制信号;效果控制模块依次通过协议转换模块32、数据过滤模块33与追光灯5控制连接,协议转换模块32用
于将灯光效果控制信号和第二灯光角度控制信号解析并传送至数据过滤模块33;角度转换模块31通过数据过滤模块33与追光灯5控制连接;数据过滤模块33用于过滤第二灯光角度控制信号,并将第一灯光角度控制信号和灯光效果控制信号传输至追光灯5。
[0038]
本发明通过设置主控器3,在主控器3上集合角度转换模块31、协议转换模块32和数据过滤模块33,从而不需要经过电脑上位机软件来进行定位控制、定位传输工作;另外,辅控器4的设置,使得追光灯5自动控制系统不仅能控制追光灯5的转动角度,还可以根据实际需要控制追光灯5的照射效果,适用性大大增强。
[0039]
本发明将摇头电脑灯做追光灯用,摇头电脑灯通过dmx信号线或网线与控台相连通信,控台自动给每台灯分配地址;并先在辅控器上输入目标灯的地址,然后再利用辅控器上的各种灯光效果控制信号按键,从而控制灯具输出不同光斑大小、亮度、颜色等灯光效果。
[0040]
本发明的舞台灯,可以产生各种效果,例如光斑的颜色、形状、雾化程度,或者频闪、动态图案、旋转图案,完全代替传统的追光灯,相对于现有技术,在追光的同时,可以产生丰富的光效。且,灯光效果和角度控制完全独立,在舞台灯改变角度的过程中,效果实时地根据需要,利用辅控器进行控制。
[0041]
本实施例中,为了达到预置效果,能提前将一段灯光效果指令程序预存在舞台灯或者辅控器内,在需要的时候直接调用对应的灯光效果指令程序,灯光效果指令程序可以是光斑的颜色、形状、雾化程度,或者频闪、动态图案、旋转图案中的至少一个或者多个互动,从而实现在舞台对象不同场景或不同位置时,也就是追光灯的转动角度不同时,带来的灯光效果也相应不同,实现预置的舞台效果,大大丰富了舞台效果,同时也实现全智能化控制。
[0042]
本实施例的追光灯自动控制系统在基站2和标签1中采用模块采集和发送数据。针对不同的舞台在使用本发明都需要对每一个基站2进行标定;标定完成后,基站2位置将不能变动,否则需要对基站2进行重新标定。将标签1与目标放在一起,这样便可以通过采集标签1的位置参数间接获得目标的位置参数;标签1主要作为信标发送位置参数,基站2则用于接收位置参数。
[0043]
本实施例中,协议转换模块32支持dmx512协议、dmx512a协议、rdm协议、acn协议、artnet协议、sacn协议、knx协议、dali协议和/或dsi协议中的至少一种。
[0044]
本实施例中,角度转换模块31与基站2采用udp进行通信连接。
[0045]
本实施例中,辅控器4为ma或martin控台。本实施例中的ma或martin控台可以通过在市场上采购德国malighting公司生产的ma系列灯光控制台来实现。
[0046]
参考图1,本实施例的基站2数量为四个,均布设置在追光场地(追光场地可以是舞台或者其它演出场地等,在此不再详述)的四周。但不局限于此,在其它实施例中,基站2数量还可以是5个、6个或7个等,在此不再详述,优选的均布设置在舞台的四周。
[0047]
本实施例中,标签1数量为1-4个。优选的,追光灯5数量为若干台,且追光灯5数量≥标签1数量,每台追光灯5至少与一个标签1相对应。每个标签1都有一个追光灯5相对应,这样能够实现同时照射舞台上的多个目标。当需要突出舞台上的某一个目标时,只要控制多个追光灯5同时照射该目标即可。
[0048]
本实施例中的主控器3包含角度转换模块31、协议转换模块32和数据过滤模块33,
角度转换模块31用于接收测距数据并进行计算,结合基站2安装位置,建立空间坐标系,计算得出标签1所在空间位置。根据追光灯5安装在舞台上的位置,计算追光灯5的投射角度;协议转换模块32用于接收解析辅控台发送过来的灯光效果控制信号;数据过滤模块33用于过滤协议转换器输出的信息,筛选所要控制追光灯5的水平相对角度控制数据和垂直相对角度控制数据,并用角度转换模块31计算出的投射角度换算成的水平相对角度控制数据和垂直相对角度控制数据替换,使追光灯5的灯光投射方向仅受主控器3控制,实现自动追光。
[0049]
工作原理:
[0050]
本实施例整套系统利用主控器3,与现有的辅控器4相配合即可实现光斑追踪,另外主控器3具有过滤功能,辅控器4的信号经过主控器3后,其x轴、y轴的转动信号被替换,但是灯的效果信号不被改变。
[0051]
实施例2
[0052]
本实施例提供一种追光灯自动控制方法,由实施例1中的追光灯自动控制系统实现,包括以下步骤:
[0053]
s1,标签1发送目标位置信号;
[0054]
s2,角度转换模块31接收目标位置信号,并将目标位置信号转换为第一灯光角度控制信号;效果控制模块发送灯光效果控制信号和第二灯光角度控制信号;
[0055]
s3,数据过滤模块33过滤第二灯光角度控制信号,然后将灯光效果控制信号和第一灯光角度控制信号传输至追光灯5。
[0056]
追光灯自动控制方法可以在没有人干预的情况下,根据目标所在的位置,将灯光自动地打到目标上,同时还能根据需要调节灯光的效果,实现灯光的自动控制,适用性强。
[0057]
显然,本发明的上述实施例仅仅是为清楚地说明本发明技术方案所作的举例,而并非是对本发明的具体实施方式的限定。凡在本发明权利要求书的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。