1.本发明涉及高速列车速度控制技术领域,特别是涉及一种cacmac(credit assigned cerebellar model articulation controller,信度分配小脑模型关节控制器)神经网络与pid(proportional
‑
integral
‑
derivative,比例
‑
积分
‑
微分)控制器复合的高速列车速度控制方法及系统。
背景技术:
2.目前,在人工智能的推动下,高速列车的驾驶方式已开始朝着自动驾驶的方向发展,各国的专家学者也开始对列车自动驾驶(ato)系统产生了浓厚的研究兴趣,而列车的速度与位置跟踪控制作为ato中的关键控制单元,其控制算法的设计与研究必然成为一种发展需求,也是实现铁路交通智能化与自动化的关键。
3.首先,在高速列车动力学模型的研究方面,有人将takagi
‑
sugen(t
‑
s)模型与模糊预测结合,可以达到提高控制精度的效果;有人将高速列车看作是一个质点,采用自适应神经模糊推理系统并设计了对应的列车速度控制自适应算法;有人建立了一种lssvm动车组运行模型,然后对动车组列车的速度进行预测控制;还有人以多质点列车模型为研究对象,利用模糊自适应pid控制器来跟踪列车的速度。
4.其次,在速度跟踪控制算法方面,有人根据最优预见控制算法,利用极点配置设计列车速度控制器,实现了与列车总控制系统的信息沟通;有人利用遗传算法改进传统pid控制器实现了对列车速度的优化控制;有人将灰色控制理论与预测控制相结合,并基于数学模型设计出了列车速度控制器。
5.可见,现有的列车的速度控制策略主要包含了pid控制、预测控制、模糊逻辑控制等传统的控制方法,且随着信息化自动化时代的到来,智能优化算法例如遗传算法、极大似然辨识算法等开始应用于列车ato系统中。
6.然而,现有的高速列车动力学模型及速度跟踪控制算法仍存在如下缺点:
7.一、关于列车动力学模型:
8.1、t
‑
s模型的建立依赖于一定规则的制定,存在着不确定性的缺点;
9.2、单质点列车模型忽略了列车车厢之间的互相影响,虽然应用最广,但是伴随控制理论的不断发展,其计算过于简单、方便,存在已经无法满足对于列车安全控制要求的缺点;
10.3、多质点模型虽然考虑了车厢之间的相互作用力,但其考虑的非线性系统太多,存在计算过程复杂不利于列车在线控制运行的缺点。
11.二、关于列车速度控制算法:
12.1、解析求解的方法在求解过程中需要对线路条件、列车信息等进行简化处理,去掉非线性因素,故需要很强的数学功底,不适合工程人员理解,例如上述的极点配置方法;
13.2、数值求解的方法对于复杂非线性的列车在线运行而言适应性很强,但有时会陷入局部最优的死循环,如上述的极大似然辨识算法;
14.3、智能优化算法和智能控制作为人工智能的重要分支,其精度和控制性能仍有待进一步改善和提高。
技术实现要素:
15.为克服上述现有技术存在的不足,本发明之一目的在于提供一种高速列车速度控制方法及系统,通过建立单位移多质点列车模型,该模型考虑了列车的运行阻力和车厢耦合力,同时又简化了计算过程,提高了高速列车运行的效率。
16.本发明之另一目的在于提供一种高速列车速度控制方法及装置,基于信度分配小脑模型关节控制器(cacmac)与比例积分微分(pid)控制器复合控制实现了高速列车速度跟踪控制,对列车的速度和位置进行跟踪控制的目的。
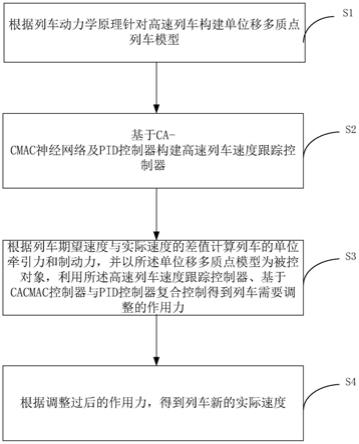
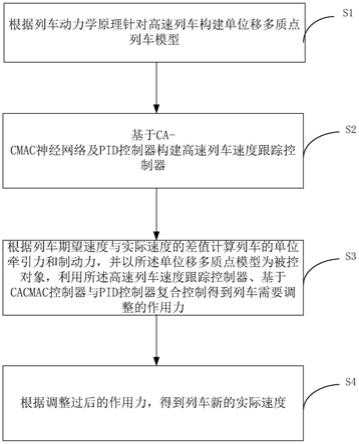
17.为达上述目的,本发明提出一种高速列车速度控制方法,包括如下步骤:
18.步骤s1,根据牛顿第二定律和列车动力学原理针对高速列车构建单位移多质点列车模型;
19.步骤s2,基于cacmac神经网络及pid控制器构建高速列车速度跟踪控制器;
20.步骤s3,利用所述高速列车速度跟踪控制器,根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,基于cacmac控制器与pid控制器复合控制得到列车需要调整的作用力;
21.步骤s4,根据调整过后的作用力,得到列车新的实际速度。
22.优选地,所述单位移多质点模型为:
[0023][0024]
其中,m
i
表示第i节车厢的质量,第i节车厢的加速度,为第i节车厢与第i 1节车厢之间加速度的差值,u
i
表示列车第i节车厢的牵引力和制动力,f
hi
和f
ri
表示第i节车厢的基本阻力和附加阻力。
[0025]
优选地,于步骤s2中,所述高速列车速度跟踪控制器包括信度分配小脑模型关节控制器和pid控制器,其中输入信号与输出信号经第一加法器相减得到误差信号,输入信号与输出信号经所述信度分配小脑模型关节控制器得到实际控制输出,所述误差信号经pid控制器得到比例输出信号,所述比例输出信号与实际控制输出经第二加法器相加得到总控制量,用于控制被控对象输出实际输出信号。
[0026]
优选地,步骤s3进一步包括:
[0027]
步骤s300,获取列车的期望速度和实际速度,将二者的差值作为误差信号;
[0028]
步骤s301,根据所述误差信号计算列车的单位牵引力和制动力;
[0029]
步骤s302,利用得到的列车的单位牵引力和制动力,以所述单位移多质点模型为被控对象,根据cacmac与pid复合控制得到列车需要调整的作用力。
[0030]
优选地,于步骤s301中,通过该误差信号计算pid控制器的控制输出得到比例输出信号u
p
,并将列车的期望速度和实际速度经信度分配小脑模型关节控制器得到实际控制输出u
n
,将该比例输出信号u
p
与实际控制输出u
n
相加得到总控制量u(k),即列车的单位牵引力和制动力。
[0031]
优选地,于步骤s302中,根据得到的列车的单位牵引力和制动力,结合所述高速列车速度跟踪控制器的权值修正公式,实时更新所述信度分配小脑模型关节控制器的权值,产生新的总控制量u(k),即列车需要调整的作用力。
[0032]
优选地,所述高速列车速度跟踪控制器的权值修正公式为:
[0033][0034][0035]
w(k)=w(k
‑
1) δw(k) α[w(k
‑
1)
‑
w(k
‑
2)]
[0036]
其中,e(k)、δw(k)均表示权值的修正因子,f(i)表示cacmac存储空间中第i个单元的学习次数,w(k)、w(k
‑
1)分别表示k时刻、k
‑
1时刻cacmac物理存储空间中的权值,η是学习常数,a
i
表示cacmac存储空间中的存储信息,c为泛化参数。
[0037]
为达到上述目的,本发明还提供一种高速列车速度控制系统,包括:
[0038]
单位移多质点列车模型构建单元,用于根据牛顿第二定律和列车动力学原理针对高速列车构建单位移多质点列车模型;
[0039]
高速列车速度跟踪控制器构建单元,用于基于cacmac神经网络及pid控制器构建高速列车速度跟踪控制器;
[0040]
高速列车速度跟踪控制器,用于根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,利用所述高速列车速度跟踪控制器、基于cacmac与pid复合控制得到列车需要调整的作用力,从而得到新的列车实际速度。
[0041]
优选地,所述高速列车速度跟踪控制器进一步包括:
[0042]
误差信号计算模块,用于获取列车的期望速度和实际速度,将二者的差值作为误差信号e;
[0043]
pid控制器,用于根据所述误差信号得到比例输出信号u
p
;
[0044]
信度分配小脑模型关节控制器,用于根据列车的期望速度与实际速度得到实际控制输出u
n
;
[0045]
总控制量计算模块,用于根据比例输出信号u
p
与实际控制输出u
n
得到系统的总控制量u(k),即列车的单位牵引力和制动力;
[0046]
权值更新模块,用于以单位移多质点列车模型为被控对象,根据高速列车速度跟踪控制器的权值修正公式实时更新信度分配小脑模型关节控制器的权值,并产生新的总控制量u(k)。
[0047]
优选地,所述高速列车速度跟踪控制器的权值修正公式为:
[0048][0049][0050]
w(k)=w(k
‑
1) δw(k) α[w(k
‑
1)
‑
w(k
‑
2)]
[0051]
其中,e(k)、δw(k)均表示权值的修正因子,f(i)表示cacmac存储空间中第i个单
元的学习次数,w(k)、w(k
‑
1)分别表示k时刻、k
‑
1时刻cacmac物理存储空间中的权值,η是学习常数,a
i
表示cacmac存储空间中的存储信息,c为泛化参数。
[0052]
与现有技术相比,本发明一种高速列车速度控制方法及系统通过建立单位移多质点列车模型,该模型考虑了列车的运行阻力和车厢之间的耦合力,同时又简化了计算过程,提高了高速列车运行的效率,并基于信度分配小脑模型关节控制器(cacmac)与比例积分微分(pid)控制器实现了高速列车速度跟踪控制、对列车的速度和位置进行跟踪控制的目的,本发明通过仿真结果证实了本发明提高了列车速度跟踪控制的精准性,响应速度很快且具有很好地抗噪声和抗干扰能力,适合高速列车在线运行控制。
附图说明
[0053]
图1为本发明一种高速列车速度控制方法的步骤流程图;
[0054]
图2为本发明具体实施例中高速列车模型示意图;
[0055]
图3为本发明具体实施例中cacmac pid控制的结构示意图;
[0056]
图4为本发明具体实施例中cacmac pid高速列车速度跟踪控制器的结构图;
[0057]
图5为本发明一种高速列车速度控制系统的系统架构图;
[0058]
图6
‑
图9分别为本发明实施例中速度跟踪、距离跟踪、速度跟踪误差以及距离跟踪误差的曲线图;
[0059]
图10
‑
图13分别为本发明实施例中加噪声的速度跟踪、加噪声的距离跟踪、加噪声的速度跟踪误差以及加噪声的距离跟踪误差的曲线图。
具体实施方式
[0060]
以下通过特定的具体实例并结合附图说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其它优点与功效。本发明亦可通过其它不同的具体实例加以施行或应用,本说明书中的各项细节亦可基于不同观点与应用,在不背离本发明的精神下进行各种修饰与变更。
[0061]
图1为本发明一种高速列车速度控制方法的步骤流程图。如图1所示,本发明一种高速列车速度控制方法,包括如下步骤:
[0062]
步骤s1,根据牛顿第二定律和列车动力学原理针对高速列车构建单位移多质点列车模型。
[0063]
一般地,一辆列车的牵引力和制动力在不同运行环境均有不同的设置,可以理解为牵引约束和制动约束,由列车受力分析可知,每节车厢同时受到了牵引力和制动力、运行阻力以及车间力的影响。在本发明具体实施例中,选取一辆高速列车,如图2所示,它由n节车厢组成,每节车厢与车厢之间可将其简化为一个“弹性
‑
阻尼”系统,因而车厢之间的内力称为耦合力,故对于第i节车厢和第i 1节车厢则有,
[0064][0065]
其中,k表示车钩系统的弹性耦合系数,d表示车钩系统的阻尼耦合系数。x
i
表示第1节车厢与第i节车厢中点的距离,x
i 1
表示第1节车厢与第i 1节车厢中点的距离,x
i
、x
i 1
也就是第i节车厢、第i 1节车厢的位移,也就是第i节车厢、第i 1节车厢的速度,令δ
x
i
表示为第i 1节车厢与第i节车厢之间的位移差,则有两车厢之间的位移关系式,
[0066]
x
i 1
‑
x
i
=δx
i
(2)
[0067]
由式(2)可以推出第i节车厢与第i 1节车厢之间加速度的关系,
[0068][0069]
式(3)中,表示第i节车厢的加速度,表示第i 1节车厢的加速度,接着,以第1节车厢为基准目标,将式(3)变形得到,
[0070][0071]
然后根据牛顿第二定律可以得到,
[0072][0073]
其中,i表示第i节车厢,u
i
表示列车第i节车厢的牵引力和制动力,f
hi
和f
ri
表示第i节车厢的基本阻力和附加阻力,f
ci
表示第i节车厢受到的耦合力,由于车厢之间的耦合力是相互的,对于一节车厢而言,既受到了前车给的耦合力,又收到了后车给的耦合力,因此对于第i节车厢而言,其所受耦合力可以表示为,
[0074]
f
ci
=f
c(i
‑
1)i
‑
f
ci(i 1)
(6)
[0075]
其中,f
c(i
‑
1)i
表示第i节车厢受到的前节车厢的作用力;f
ci(i 1)
表示第i节车厢受到的后节车厢的作用力
[0076]
于是将式(6)代入式(5)中可以得到每一节车厢的受力模型,
[0077][0078]
其中m
i
表示第i节车厢的质量。
[0079]
由于第1节车厢只受到来自后面第2节车厢的作用力,第n节车厢只受到来自前面第n
‑
1节车厢的作用力,因而f
c01
=0且f
cn(n 1)
=0,然后将式(1)中的关系代入式(7)中有,
[0080][0081]
将式(4)中加速度的关系式代入式(8)有,
[0082][0083]
最后,将式(9)的两边依次相加,可以发现的是前后车厢的耦合力全部抵消为零了,因此可以得到改进的多质点列车模型,即单位移多质点模型为:
[0084][0085]
步骤s2,基于cacmac神经网络及pid控制器构建高速列车速度跟踪控制器。
[0086]
图3为本发明具体实施例中cacmac pid复合控制的结构示意图,图4为本发明具体实施例中基于cacmac神经网络及pid控制器构建的高速列车速度跟踪控制器的结构示意图。具体地,所述高速列车速度跟踪控制器包括信度分配小脑模型关节控制器(cacmac)cm1和pid控制器pid1,输入信号r与输出信号y经加法器add1相减得到两者的差值即误差信号e,输入信号r与输出信号y经信度分配小脑模型关节控制器cm1得到实际控制输出u
n
,误差信号e经比例积分微分控制器(pid控制器)pid1得到比例输出信号u
p
,比例输出信号u
p
与实际控制输出u
n
经加法器add2相加得到总控制输入u,总控制输入u控制被控对象输出实际输出信号y。
[0087]
其中u
p
表示pid控制器的输出值,这里采用经典位置式pid算法,即,
[0088]
u
p
(k)=k
p
·
x(1) k
d
·
x(2) k
i
·
x(3)(11)
[0089][0090]
式(11)和式(12)中,t表示时间,k
p
、k
d
、k
i
分别表示比例、微分、积分系数,error(k)表示系统的误差信号,则图3中的控制算法为:
[0091][0092]
u(k)=u
n
(k) u
p
(k)(14)
[0093]
式(13)和式(14)中,un(k)表示信度分配小脑模型关节控制器(cacmac)cm1的实际控制输出值;u(k)表示高速列车速度跟踪控制器的总控制量,然后得到cacmac与pid复合控制的高速列车速度跟踪控制器的权值修正公式为:
[0094][0095]
[0096]
w(k)=w(k
‑
1) δw(k) α[w(k
‑
1)
‑
w(k
‑
2)](17)
[0097]
其中,e(k)、δw(k)均表示权值的修正因子;f(i)表示cacmac存储空间中第i个单元的学习次数;w(k)、w(k
‑
1)分别表示k时刻、k
‑
1时刻cacmac物理存储空间中的权值;η是学习常数,且0<η<1;a
i
表示cacmac存储空间中的存储信息;c被称为泛化参数,其值的选取与神经网络的泛化能力有关。
[0098]
步骤s3,根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,利用所述高速列车速度跟踪控制器、基于cacmac控制器与pid控制器复合控制得到列车需要调整的作用力。
[0099]
具体地,步骤s3进一步包括:
[0100]
步骤s300,获取列车的期望速度和实际速度,将二者的差值作为误差信号。
[0101]
如图4所示,列车的期望速度v
d
就是系统的控制输入,即为图3中的r,列车的实际速度v
a
就是系统的控制输出,即为图3中的y,error表示系统的误差信号,为期望速度与实际速度的差值,即error(k)=v
d
(k)
‑
v
a
(k)。
[0102]
步骤s301,根据所述误差信号计算列车的单位牵引力和制动力。
[0103]
在本发明具体实施例中,通过该误差信号计算pid控制器pid1的控制输出,并结合上述式(13)和式(14)得到系统的总控制量u(k),这里的u(k)就是列车的单位牵引力和制动力。
[0104]
步骤s302,利用得到的列车的单位牵引力和制动力,以所述单位移多质点模型为被控对象,根据cacmac与pid复合控制得到列车需要调整的作用力。
[0105]
在本发明具体实施例中,以单位移多质点模型为被控对象,利用得到的列车的单位牵引力和制动力,结合所述高速列车速度跟踪控制器的权值修正公式,即上述式(15)至式(17),实时更新cacmac神经网络的权值,并产生新的u(k)以及实际的列车牵引力和制动力。
[0106]
步骤s4,根据调整过后的作用力,得到列车新的实际速度。
[0107]
在本发明具体实施例中,根据得到的实际的列车牵引力和制动力,最后得到新的列车实际速度v
a
。
[0108]
图5为本发明一种高速列车速度控制系统的系统架构图。如图5所示,本发明一种高速列车速度控制系统,包括:
[0109]
单位移多质点列车模型构建单元501,用于根据列车动力学原理针对高速列车构建单位移多质点列车模型。
[0110]
在本发明具体实施例中,选取一辆高速列车,同样参照图2所示,它由n节车厢组成,每节车厢与车厢之间可将其简化为一个“弹性
‑
阻尼”系统,因而车厢之间的内力称为耦合力,故对于第i节车厢和第i 1节车厢则有,
[0111][0112]
其中,k表示车钩系统的弹性耦合系数,d表示车钩系统的阻尼耦合系数。x
i
表示第1节车厢与第i节车厢中点的距离,x
i 1
表示第1节车厢与第i 1节车厢中点的距离,x
i
、x
i 1
也就是第i节车厢、第i 1节车厢的位移,也就是第i节车厢、第i 1节车厢的速度,令δx
i
表示为第i 1节车厢与第i节车厢之间的位移差,则有两车厢之间的位移关系式,
[0113]
x
i 1
‑
x
i
=δx
i
(2)
[0114]
由式(2)可以推出第i节车厢与第i 1节车厢之间加速度的关系,
[0115][0116]
式(3)中,表示第i节车厢的加速度,表示第i 1节车厢的加速度,接着,以第1节车厢为基准目标,将式(3)变形得到,
[0117][0118]
然后根据牛顿第二定律可以得到,
[0119][0120]
其中,u
i
表示列车牵引力和制动力,f
hi
和f
ri
表示基本阻力和附加阻力,f
ci
表示车间耦合力,由于车厢之间的耦合力是相互的,对于一节车厢而言,既受到了前车给的耦合力,又收到了后车给的耦合力,因此对于第i节车厢而言,其所受耦合力可以表示为,
[0121]
f
ci
=f
c(i
‑
1)i
‑
f
ci(i 1)
(6)
[0122]
于是将式(6)代入式(5)中可以得到每一节车厢的受力模型,
[0123][0124]
由于第1节车厢只受到来自后面第2节车厢的作用力,第n节车厢只受到来自前面第n
‑
1节车厢的作用力,因而f
c01
=0且f
cn(n 1)
=0,然后将式(1)中的关系代入式(7)中有,
[0125][0126]
将式(4)中加速度的关系式代入式(8)有,
[0127][0128]
最后,将式(9)的两边依次相加,可以发现的是前后车厢的耦合力全部抵消为零了,因此可以得到改进的多质点列车模型,即单位移多质点模型为:
[0129]
[0130]
高速列车速度跟踪控制器构建单元502,用于基于cacmac神经网络及pid控制器构建高速列车速度跟踪控制器。
[0131]
同样参照图3及图4,具体地,所述高速列车速度跟踪控制器包括信度分配小脑模型关节控制器(cacmac)cm1和pid控制器pid1,输入信号r与输出信号y经加法器add1相减得到两者的差值即误差信号e,输入信号r与输出信号y经信度分配小脑模型关节控制器cm1得到实际控制输出u
n
,误差信号e经比例积分微分控制器(pid控制器)pid1得到比例输出信号u
p
,比例输出信号u
p
与实际控制输出u
n
经加法器add2相加得到总控制输入u,总控制输入u控制被控对象输出实际输出信号y。
[0132]
其中u
p
表示pid控制器的输出值,这里采用经典位置式pid算法,即,
[0133]
u
p
(k)=k
p
·
x(1) k
d
·
x(2) k
i
·
x(3)(11)
[0134][0135]
式(11)和式(12)中,t表示时间,k
p
、k
d
、k
i
分别表示比例、微分、积分系数,error(k)表示系统的误差信号,则图3中的控制算法为:
[0136][0137]
u(k)=u
n
(k) u
p
(k)(14)
[0138]
式(13)和式(14)中,un(k)表示信度分配小脑模型关节控制器(cacmac)cm1的实际控制输出值;u(k)表示cacmac系统的总控制量,然后得到cacmac与pid复合控制的高速列车速度跟踪控制器的权值修正公式为:
[0139][0140][0141]
w(k)=w(k
‑
1) δw(k) α[w(k
‑
1)
‑
w(k
‑
2)](17)
[0142]
高速列车速度跟踪控制器503,用于根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,利用所述高速列车速度跟踪控制器、基于cacmac控制器与pid控制器复合控制得到列车需要调整的作用力,从而得到新的列车实际速度v
a
。
[0143]
具体地,高速列车速度跟踪控制器503进一步包括:
[0144]
误差信号计算模块,用于获取列车的期望速度和实际速度,将二者的差值作为误差信号e。
[0145]
在本发明具体实施例中,误差信号计算模块利用加法器add1,其中列车的期望速度v
d
为系统的控制输入,即为图3中的r,列车的实际速度v
a
为系统的控制输出,即为图3中的y,error表示系统的误差信号,为期望速度与实际速度的差值,即error(k)=v
d
(k)
‑
v
a
(k)。
[0146]
pid控制器pid1,用于根据所述误差信号得到比例输出信号。
[0147]
具体地,误差信号e经比例积分微分控制器(pid控制器)pid1得到比例输出信号u
p
。
[0148]
信度分配小脑模型关节控制器(cacmac)cm1,用于根据列车的期望速度与实际速度得到实际控制输出。
[0149]
具体地,列车的期望速度v
d
与列车的实际速度v
a
经信度分配小脑模型关节控制器cm1得到实际控制输出u
n
。
[0150]
总控制量计算模块,用于根据比例输出信号u
p
与实际控制输出u
n
得到系统的总控制量u(k),这里的u(k)即为列车的单位牵引力和制动力。
[0151]
权值更新模块,用于以单位移多质点列车模型为被控对象,根据高速列车速度跟踪控制器的权值修正公式实时更新信度分配小脑模型关节控制器cm1的权值,并产生新的总控制量u(k),即实际的列车牵引力和制动力,
[0152]
最后通过单位移多质点列车模型,根据新的总控制量u(k)得到新的列车实际速度v
a
,从而完成一次学习跟踪过程。
[0153]
实施例
[0154]
在本实施例中,实验仿真的被控对象为第1节所提出的单位移多质点列车模型,列车总质量为840t,其最高运行速度为350km/h,列车自动防护限速为360km/h,选取基本阻力参数a、b和c分别为a=0.53、b=0.0039、c=0.000114,然后通过2.1节的学习算法编写matlab仿真程序,此次仿真共有2000个期望速度样本点,在一台系统配置为core i7,内存为8gb的计算机上运行程序,结果如图6、图7、图8和图9所示,列车的实际速度和实际距离都能很好地跟踪给定的期望速度和期望距离,期望速度和期望距离曲线与实际速度和实际距离曲线两种曲线除极个别点外基本重合,速度误差曲线基本在零曲线附近波动,且速度跟踪误差最大保持在
±
4km/h的范围之内,距离跟踪误差最大保持在
±
3m的范围之内。
[0155]
下面进行比较分析,在列车期望速度样本点均为2000个且列车参数一致的条件下,对模糊神经网络pid控制和传统pid控制进行仿真实验,对比分析结果如表1所示,
[0156]
表1三种控制方法性能比较
[0157][0158]
从表1中可以看出三种控制方法都可以实现列车速度跟踪控制的效果,但各自性能有所不同,本发明提出的方法具有最小的速度和距离跟踪误差,控制精度很高。
[0159]
为了进一步验证cacmac与pid复合控制的性能,本发明还对这2000个样本点增加了随机噪声干扰,仿真结果如图10、图11、图12和图13所示,从这些图中可以明显看到,即使给系统加上较大的噪声干扰,该系统的控制性依旧是比较好的,其速度跟踪平均误差为0.2924km/h,误差范围依然在
±
4km/h,这也说明了本发明提出的方法具有很好地抗噪声和抗干扰能力。
[0160]
综上所述,本发明一种高速列车速度控制方法及系统通过建立单位移多质点列车模型,该模型考虑了列车的运行阻力和车厢之间的耦合力,同时又简化了计算过程,提高了高速列车运行的效率,并基于信度分配小脑模型关节控制器(cacmac)与比例积分微分(pid)控制器实现了高速列车速度跟踪控制、对列车的速度和位置进行跟踪控制的目的,本发明通过仿真结果证实了本发明提高了列车速度跟踪控制的精准性,响应速度很快且具有很好地抗噪声和抗干扰能力,适合高速列车在线运行控制。
[0161]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何本领域技术人员均可在不违背本发明的精神及范畴下,对上述实施例进行修饰与改变。因此,本发明的权利保护范围,应如权利要求书所列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。