基于rfid的接地识别监测系统
技术领域
1.本发明涉及信号识别技术领域,尤其涉及基于rfid的接地识别监测系统。
背景技术:
2.接地线检测在现有技术的环境下,普遍存在着感应电,继而在感应电的存在下,检测人员在进行实际检测过程中会有触电危险,同时现有技术在检测时,检测结果准确度更多依赖于检测人员对于检测作业的熟练度。
3.现有技术中,在进行接地线检测时,会从两个方面进行,一方面是对于接地电线本身进行,另一个方面是对于检测人员本身进行,因此无法对两者起到一个合理高效的兼顾作用。
技术实现要素:
4.本发明的目的在于提供基于rfid的接地识别监测系统,解决现有技术中在接电线检测时人工无法高效准确检测且识别出接地线本身感应电信号的问题。
5.本发明的目的通过以下述技术方案来实现,包括以下步骤:s1.信号反馈,输出监测信号,与待监测接地线信号相互配合识别后,反馈识别射频信号;s2.信号接收,将反馈识别射频信号进行定向定位接收;s3.信号一级处理,将接收到的反馈识别射频信号进行基于aloha算法的第一次信号监测处理;s4.信号过滤,将一级处理后的射频信号进行过滤处理,引导分离频率不同的两种信号;s5.信号二级处理,将已经过滤后的信号进行第二次定位处理,基于rfid定位算法进行处理,得到定位识别信号;s6.循环监测,重复上述步骤s1
‑
s5,直至监测识别作业结束。
6.需要说明的是,本方案中改变以往惯用的人工配合检测识别接电线感应电信号的方法,加入了信号一级处理以及信号二级处理,这两步地加入可以高效保证感应电信号在出现后,即可以被高效识别以及处理,保证接地线环境的安全性。其中,申请人在实际实验过程中,实验得出,对于感应电信号进行两次两级处理的方法,可以将接地线作业环境中存在的感应电信号进行高效识别定位,进而进行相应的保护作业。
7.所述s1具体如下:所述输出信号在有控制要求时可以提供一个开关量信号,使被控设备动作,当控制器接收到输入信号后,根据预先编入的程序,控制器通过总线将联动控制信号进行输送,所述联动控制信号为接地线检测信号,所述联动控制信号经过数模电交互后,形成射频信号。
8.需要说明的是,利用现有技术输出信号的输出作用原理,将接地线检测信号中含有的感应电信号进行及时的交互,将信号的属性进行及时变化,提高感应电信号的后续传递效率以及后续的识别效果以及速度。
9.所述s2具体如下:所述信号接收过程中所述射频信号会再一次进行数模电交互,形成可以被系统进一步识别的模拟信号,系统随机进行定位识别信号接收。
10.需要说明的是,将信号进行进一步的是处理,在进行定位,是对信号定位识别精确
的加强作用。
11.所述s3具体如下:所述aloha算法把监测信号分成多个离散的时隙,每个时隙长度大于等于一个帧,监测信号只能在每个时隙的开始处发送数据,在每个时隙中,监测信号与阅读器联通,接到阅读器的指令后把自己的id串传输给阅读器,所述阅读器会进行进一步的信号监测判断。
12.需要说明的是,现有技术中对于aloha算法的应用主要处于防碰撞领域,结合aloha算法主要的作用就是对于一些存储读取进行防干扰处理,本方案将上述算法加入到了信号的定位识别以及监测中,将防碰撞算原理结合信号的输出特点进行间隙对位,保证了感应电信号识别的高效以及准确。
13.所述s4具体如下:所述引导过滤包括将信号进行增益处理,将所述一级处理后的射频信号进行增益处理,基于频率不同进行分通道引导增益。
14.需要说明的是,增益处理的目的在于加强信号的识别频率,将已经定位反馈得到的信号进行一个高效率的处理,保证需要进行利用的信号频率清晰,提高预判以及识别监测的精确度。
15.所述s5具体如下:所述定位算法包括一次定位处理以及补偿误差处理,其中一次定位处理具体为依据如下公式实现:
16.rssi=
‑
(a 10
·
nlgd)
17.rssi是接收信号强度,d是收发节点之间的距离,n是信号传播因子;
18.其中补偿误差处理具体为依据如下公式实现:
19.rssi=
‑
(a 10nlgd)
‑
eaf
20.eaf为环境影响因素。
21.需要说明的是,定位算法中引入了一次定位处理和补偿误差处理可以进行双层的定位处理,现有技术中,通常采用简单的一次处理信号即对于信号进行加工,因此在接地线的信号处理中,通常就会出现感应电信号无法高效识别的结果,因此会造成相应的危险,上述实现处理的方式中可以看出,常数a和n的值决定了接收信号强度和信号传输距离的关系。射频参数a和n用于描述网络操作环境。射频参数a被定义为用dbm表示的距发射器1m时接收到信号平均能量的绝对值。如平均接收能量为
‑
40dbm,那么参数a被定为40。射频参数n指出了信号能量随着距收发器距离增加而衰减的速率,其数值的大小取决于无线信号传播的环境,rssi值受周围环境的影响较大,具有时变特性,有时会偏离式的描述,根据接收信号强度估计出的距离d就会有较大误差。通过大量数据分析,采用了噪声模型,即环境衰减因素模型,可有效补偿环境影响带来的误差。
22.所述s6具体如下:经过二级处理的信号,进行rtk算法处理,将二级信号进行稳定处理,随即将信号发送至mcu处理器。
23.需要说明的是,本技术中的rtk算法为独有的算法,可以实现信号定位的稳定厘米级定位精度,与现有技术定位精度完全不同,同时申请人在实际实验中得到厘米级的定位精度可以保证更高的安全系数。
24.本发明与现有技术相比,具有如下的优点和有益效果:
25.1.加入信号一级处理和信号二级处理,可以有效保证接地线感应电信号的精准识别,保证信号之间转化处理地高效进行;
26.2.进行数电模电的交互转换,可以在交互处理的进程上,保证信号之间识别定位的准确性,保证识别定位的高效率;
27.3.补偿算法加入的作用是为了保证以及提高因为环境所导致的信号识别偏差,提高识别的效果以及预先进行感应电信号的判断。
附图说明
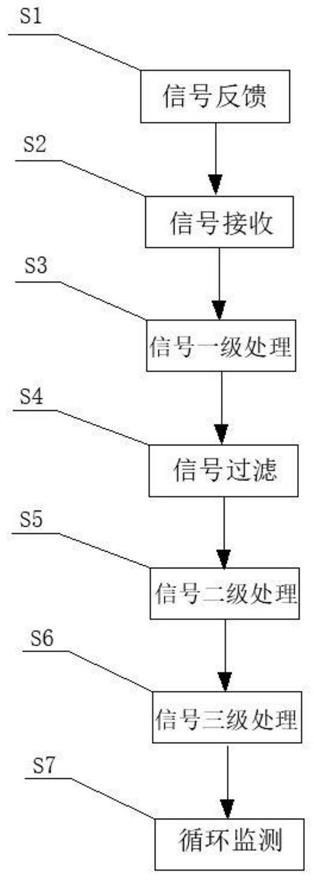
28.图1是本发明的流程示意图。
具体实施方式
29.请参考说明附图1,本实施例提供了基于rfid的接地识别监测系统,该基于rfid的接地识别监测系统主要用于解决现有技术中在接电线检测时人工无法高效准确检测且识别出接地线本身感应电信号的问题,该系统已经处于实际应用阶段。
30.本实施例具体包括以下步骤:s1.信号反馈,输出监测信号,与待监测接地线信号相互配合识别后,反馈识别射频信号;s2.信号接收,将反馈识别射频信号进行定向定位接收;s3.信号一级处理,将接收到的反馈识别射频信号进行基于aloha算法的第一次信号监测处理;s4.信号过滤,将一级处理后的射频信号进行过滤处理,引导分离频率不同的两种信号;s5.信号二级处理,将已经过滤后的信号进行第二次定位处理,基于rfid定位算法进行处理,得到定位识别信号;s6.信号三级处理,将已经进行过二级处理的信号,进行rtk算法处理,随即将处理信号发送至mcu进行处理;s7.循环监测,重复上述步骤s1
‑
s6,直至监测识别作业结束,其中上述步骤之间的具体工作过程为:
31.首先需要说明的是,本实施例的系统是使用在接地线监测定位环节中的局部系统,并不是对于接电线全生命周期进行的监测定位识别系统,基于此,本实施例具体作业过程为,操作人员在进行接地线监测识别作业时,首先会对监测识别环境进行一个初步评估,也就是对于接地线本身以及接地线所处环境进行评估,现有技术中在这个环节会进行如下的人工作业:在无电压的情况下.操作人员拿万用表和长一点的线一头插在任意一插座的接地线端上另一头搭在万用表上的表棒上。然后把万用表的另一头搭在配电箱里的接地线总进线处,如果表上显示通或测出的电阻不大于某一值即为正常;在有电压的情况下.操作人员拿万用表以220v三极插座为例.假设火为a.零为b.地为c.操作人员先测量a与b的电压.再测量a与c的电压,如果a与b的电压略大于a与c的电压二者相差在某些限定值以内正常.用万用表测量b与c之间的电阻如b与c之间通或二者有电阻且电阻不大于某一限定值为正常,上述的过程中很容易了解到,操作过程繁琐且更多基于人工的参与。
32.本技术的实施例中,首先接地线的感应电信号会在场效应的作用下进行敷设散布,因此会在一个特定的区域内形成一个较为稳定的电场,当电场形成时,周围的电信号会激增,此时信号会进行初步反馈,在现有技术的支持上,对场信号进行常规的射频输出,因而射频信号的输出方式即为现有技术中采用的射频技术,在射频信号发出后,本实施例会对射频信号进行接收,相应的射频信号会在现有接收器的作用下进行信号交互接收,同时伴随信号的转化,在转化的过程中实现定位,定位的具体原理为,可以参考蝙蝠的超声波定位原理,本实施例为衍用了超声波的定位方法,将信号进行数电以及模电的转化接收,因此整个接收定位的过程中,会不断进行转化,提高定位精确度,本实施例所说的转化的信号为
场内的感应电信号。
33.接着,在接收到相应的感应电转化信号后,会对信号进行一级处理,在处理过程中应用aloha算法,现有技术中aloha算法主要应用在防碰撞方面,本实施例采用aloha算法的防碰撞算法原理,将每个感应电信号进行信号识别匹配,在实际作业中,必然会出现信号无法进行一一对位识别的情况,实际情况如下信号对应识别数量少、相等和多,因此为了解决这个问题,提高监测识别效率,本实施例aloha算法会在感应电信号远远多于固定的对应监测识别器时,会产生过多碰撞;反之,会产生较少碰撞,当过多或者过少时,aloha算法会进行补偿作业,将未进行一一对应匹配识别定位的感应电信号进行追踪定位识别,提高监测定位效率,现有技术仅仅通过信号简单定位实现,定位效果不好且定位的效果较差,本实施例较佳的实施方式即为上述的aloha算法识别技术,将实施于不同领域的技术问题,进行转化使用,提高作业效果。
34.其次,已经通过aloha算法的信号可以进行信号过滤处理,将信号中的有效信号源进行增益处理,增益处理过程为现有技术的增益处理方式,此处不再赘述,增益的目的为了保证信号识别清晰度。最后在有效感应电信号经过上述步骤定位识别后,会进入二级信号处理中,在二级信号处理中,加入一次定位处理以及补偿误差处理可以双层提高信号最终监测识别以及定位的准确度,具体过程如下,首先在一次定位处理中,基于如下公式进行判定:
35.rssi=
‑
(a 10
·
nlgd)
ꢀꢀꢀ
公式1
36.其中rssi是接收信号强度,d是收发节点之间的距离,n是信号传播因子,其中常数a和n的值决定了接收信号强度和信号传输距离的关系。射频参数a和n用于描述网络操作环境,本实施例中即为感应电场的场效应,射频参数n指出了信号能量随着距收发器距离增加而衰减的速率,其数值的大小取决于场效应的环境,因此基于上述公式,本实施例的接地线的监测在二级信号处理过程中的一次定位处理中,可以依据上述公式进行接收数据的合理改变,当感应电信号的强度可以被清晰监测识别到时,d的具体数据就会被显示,也就是将虚拟的信号显示更改为实质数值距离显示,方便识别接收。接着,在进行完一次定位后,会紧接着进行补偿误差处理,处理过程依据如下公式:
37.rssi=
‑
(a 10nlgd)
‑
eaf
ꢀꢀꢀ
公式2
38.上式中eaf为环境影响因素,它的值取决于室内环境,是靠大量的数据累积的经验值,eaf是一个随机变量,但为了增强实用性,将其固定为一个值。本实施例中,因为在场效应的作用下,感应电信号会受到很多环境因素的影响导致信号接收的不全面,因此本实施例设置一个补偿误差进行处理,可以有效降低相应的信号丢失,提高接地线的感应电信号的识别监测覆盖度,现有技术中在进行完相应的信号收集识别后,不会再进行进一步的处理,因此导致信号接收识别效果差,导致操作人员进入现场进行相应作业会存在危险,同时也可以降低接地线的感应电信号的识别监测错误率,在完成上述信号处理后,将处理后的信号导入本技术独有rtk算法中进行处理,稳定达到厘米级定位精度,本监测系统支持多系统联合定位,具有高性能、高精度、抗干扰、低功耗的特点,申请人在实际实验中发现本监测系统可以实现支持bds/gps/qzss多系统联合定位。
39.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。