基于动量编码的x射线衍射成像装置及方法
技术领域:
1.本发明属于x射线衍射成像技术领域,具体是一种基于动量编码的x射线衍射成像装置及方法。
背景技术:
2.x射线衍射强度关联成像技术是一种利用光场高阶关联的衍射成像技术。该成像技术在理论上不需要相干光源就可以得到物体透过率函数的傅里叶变换分布,通过相位恢复算法恢复出物体的实空间分布信息。由于其对光源要求较低,有望实现小型化的显微成像装置。
3.中国科学院上海光学精密机械研究所的喻虹等人设计了非相干x射线衍射强度关联成像装置(非相干x射线衍射强度关联成像装置,201110148476.6),并于2016年完成了x射线傅里叶变换关联成像(xfgi)的原理演示实验(h.yu et al.,“fourier
‑
transform ghost imaging with hard x rays,”phys.rev.lett.,vol.117,no.11,2016),验证了该成像技术的有效性。但该技术采集的数据是时间序列的,主要存在以下几个局限:
4.1)在理论上,关联成像的结果是通过计算系综平均得到的,需要无限多的时间序列才能够得到结果。在实际中,往往是有限次的测量,通过压缩感知等算法得到一个较为满意的结果,其时间测量次数通常为几百至数千次。较多的时间测量次数带来的必然是成像时间的延长,特别的在x光成像领域中,较长的成像时间通常是难以接受的。
5.2)传统强度关联衍射成像技术中,在探测臂通常是采样点探测器,相比与面阵探测器,点探测器只能够记录一个空间点的光强数据。而探测臂光强在空间中具有一定的分布,仅记录一点的光强数据无疑造成了光通量的浪费。
6.3)由于传统分光装置无法运用在x射线分光中,探测臂和参考臂需要依靠是否在光路中放置待测物体进行分辨。因此,探测臂和参考臂的数据需要依靠时间序列采集,大大延长成像时间。
技术实现要素:
7.本发明要解决的技术问题在于克服上述在先技术的缺陷,提出一种基于动量编码的x射线衍射成像装置及方法,在光路中引入动量编码模块,其中,动量编码模块为一个多衍射体结构,各个衍射体具有不同的衍射周期、中心位置与指向。x射线源发出的发散的x射线经过动量编码模块,各个不同衍射周期、中心位置与指向的衍射体对发散的x射线的动量进行编码,单一x射线面阵探测器上记录的空间光强分布包含在先技术中所述探测臂与参考臂测量得到的空间信息,通过计算x射线面阵探测器上记录的空间光强分布的空间关联得到物体的傅里叶衍射谱,进行相位恢复或端对端的图像恢复神经网络程序得到物体的实空间强度分布。
8.本发明的技术解决方案如下:
9.一种基于动量编码的x射线衍射成像装置及方法,其特征在于其构成包括x射线
源、动量编码模块、待测物体、x射线面阵探测器和数据处理模块。所述的x射线源发出的发散的x射线经过动量编码模块,汇聚通过待测物体后射入x射线面阵探测器。所述的数据处理模块与x射线面阵探测器相连,具有对记录的光强空间分布进行待测物体实空间分布恢复的程序。
10.所述的动量编码模块是一个多衍射体结构,各个衍射体的衍射周期、中心位置与指向的编码会对发散的x射线的动量产生编码作用。所述的x射线源是真实热x射线源,或赝热x射线源。
11.所述的基于动量编码的x射线衍射成像装置及方法,其特征在于所述的数据处理模块是计算机,或具有计算和存储能力的处理器。
12.所述的数据处理模块包含程序有进行空间强度关联计算的数值计算程序与相位恢复算法程序,或深度学习训练的端对端的图像恢复神经网络程序。
13.该成像光路与成像方法具体为:
14.<1>调节x射线源、动量编码模块、x射线面阵探测器同轴,其中,x射线源和动量编码模块的距离为d
forward
,动量编码模块和x射线面阵探测器的距离为d
backward
;
15.<2>将待测物体放入此光路中,其距x射线面阵探测器距离为d
ccd
,调节其与光路同轴;
16.<3>在x射线源的一个相干时间内,x射线面阵探测器曝光一次,获得空间光强分布图像为i(x,y),其中,x,y为x射线面阵探测器的空间坐标;
17.<4>数据处理模块对空间光强分布图像进行空间强度关联计算与相位恢复运算,或深度学习训练的端对端的图像恢复神经网络运算,最后得到待测物体的实空间分布信息。
18.所述的多衍射体结构满足:
19.<1>每个衍射体满足衍射体同侧衍射公式:
20.d[sin(θ
in
) sin(θ
out
)]=mλ
[0021]
其中,d为衍射周期,θ
in
为入射衍射体的x射线和衍射体平面法线的夹角,θ
out
为出射衍射体的x射线和衍射体平面法线的夹角,m为衍射级次,λ为x射线的波长;
[0022]
<2>所述的光路中,单个衍射体中心位置满足如下公式:
[0023][0024]
其中,ρ为单个衍射体中心在动量编码模块的径向位置,ρ
′
为单个衍射体相对于物平面的径向位置;
[0025]
<3>每一个衍射体的一级次衍射x射线通过待测物体中心,需满足每一个衍射体的指向,即z轴标定角度,满足:
[0026][0027]
其中,x,y是单个衍射体中心在动量编码模块的相对位置,且满足
[0028]
<4>每一个衍射体的一级次衍射x射线通过待测物体中心,需满足以下式子:
[0029][0030]
所述的多衍射体结构的设计要求,可以解得:
[0031][0032]
可以看出单个衍射体中心在动量编码模块的径向位置ρ和衍射周期d成反比;
[0033]
经过上述的单个衍射体的出射x射线的将被编码为:
[0034][0035]
<5>所述的多衍射体结构中的各个衍射体,所述的选取指向与位置方式,在动量编码模块上排列,且不存在靠近与重叠交叉。
[0036]
所述的单个衍射体结构可以是光栅、晶体、多层膜结构或其他可以满足上述原理的结构。
[0037]
本发明的技术效果如下:
[0038]
本发明基于动量编码的x射线衍射成像装置及方法在x射线衍射成像技术中引入动量编码模块,使用单臂收集数据,其光学传递过程和处理过程不同于传统的时间序列关联成像计算方法,应用于x射线衍射成像中,能极大的提高图像质量和成像速度,并减少待测样品辐射损伤。
附图说明:
[0039]
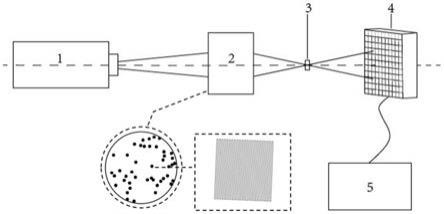
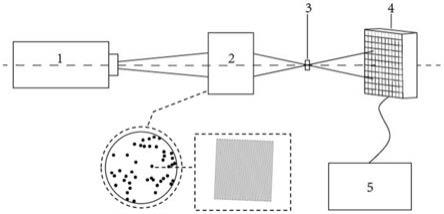
图1是本发明一种基于动量编码的x射线衍射成像装置及方法的实施例结构示意图,图中:
[0040]
1:x射线源,2:动量编码模块,3:待测物体,4:x射线面阵探测器,5:数据处理模块。
[0041]
图2是本发明一种基于动量编码的x射线衍射成像装置及方法的实施例x射线面阵探测器记录下的光强空间分布。
[0042]
图3是本发明一种基于动量编码的x射线衍射成像装置及方法的实施例动量编码模块的结构示意图。
[0043]
图4是本发明一种基于动量编码的x射线衍射成像装置及方法的实施例动量编码模块的多衍射体结构细节图。
具体实施方式:
[0044]
本发明基于动量编码的x射线衍射成像装置,如图1所示,构成包括x射线源1、动量编码模块2、待测物体3、x射线面阵探测器4、数据处理模块5。x射线源1、动量编码模块2、待
测物体3、x射线面阵探测器4处于同一高度。x射线源1发出的发散的x射线经过动量编码模块2,汇聚通过待测物体3后射入x射线面阵探测器4,x射线面阵探测器4记录x射线光强空间信息。数据处理模块5与x射线面阵探测器4相连,具有对记录的光强空间分布进行待测物体实空间分布恢复的程序。能够在单次曝光的情况下进行成像。
[0045]
利用本实施例的基于动量编码的x射线衍射成像装置进行成像,包括以下步骤:
[0046]
<1>调节x射线源1、动量编码模块2、x射线面阵探测器4同轴,其中,x射线源1和动量编码模块2的距离为d
forward
,动量编码模块2和x射线面阵探测器4的距离为d
backward
;
[0047]
在本实施例中,x射线源1和动量编码模块2的距离为d
forward
为55cm,动量编码模块2和x射线面阵探测器4的距离为d
backward
为118cm;
[0048]
<2>将待测物体3放入此光路中,其距x射线面阵探测器4距离为d
ccd
,调节其与光路同轴;
[0049]
在本实施例中,待测物体3距x射线面阵探测器4距离为d
ccd
为100cm;
[0050]
<3>在x射线源1的一个相干时间内,x射线面阵探测器4曝光一次,获得空间光强分布图像为i;
[0051]
在本实施例中,x射线源1为赝热光源,波长为1.1324nm,相干时间t0为40秒。x射线面阵探测器4的曝光时间t
t
为30秒,满足强度关联成像的相干探测条件:t
t
<t0;
[0052]
在本实施例中,x射线面阵探测器4的维度大小为512
×
512,空间光强分布见图2。
[0053]
<4>数据处理模块5对空间光强分布图像进行空间强度关联计算与相位恢复运算,或深度学习训练的端对端的图像恢复神经网络运算,最后得到待测物体3的实空间分布信息。
[0054]
在本实施例中,数据处理模块5是含有深度学习训练的端对端的图像恢复神经网络模型的计算机。
[0055]
所述的动量编码模块中的多衍射体结构满足:
[0056]
<1>每个衍射体满足衍射体同侧衍射公式:
[0057]
d[sin(θ
in
) sin(θ
out
)]=mλ
[0058]
其中,d为衍射周期,θ
in
为入射衍射体的x射线和衍射体平面法线的夹角,θ
out
为出射衍射体的x射线和衍射体平面法线的夹角,m为衍射级次,λ为x射线的波长;
[0059]
<2>所述的光路中,单个衍射体中心位置满足如下公式:
[0060][0061]
其中,ρ为单个衍射体中心在动量编码模块的径向位置,ρ
′
为单个衍射体相对于物平面的径向位置;
[0062]
<3>每一个衍射体的一级次衍射x射线通过待测物体中心,需满足每一个衍射体的指向,即z轴标定角度,满足:
[0063]
[0064]
其中,x,y是单个衍射体中心在动量编码模块的相对位置,且满足
[0065]
<4>每一个衍射体的一级次衍射x射线通过待测物体3中心,需满足以下式子:
[0066][0067]
根据所述的多衍射体结构的设计要求,可以解得:
[0068][0069]
可以看出单个衍射体中心在动量编码模块的径向位置ρ和衍射周期d成反比;
[0070]
经过上述的单个衍射体的出射x射线的将被编码为:
[0071][0072]
<5>所述的多衍射体结构中的各个衍射体,按照<3>、<4>中所述的衍射周期、选取指向与位置方式,在动量编码模块上排列,且不存在靠近与重叠交叉。
[0073]
在本实施例中,动量编码模块为多光栅结构。装置上随机部署255个光栅。其衍射周期,选取指向与位置由上述公式限制。本实施例中的动量编码模块示意图,见图3。动态方向编码装置多衍射体结构细节图,见图4。
[0074]
综上所述,本发明基于动量编码的x射线衍射成像装置及方法在x射线衍射成像技术中引入动量编码模块,使用单臂收集数据,其光学传递过程和处理过程不同于传统的时间序列关联成像计算方法,应用于x射线衍射成像中,能极大的提高图像质量和成像速度,并减少待测样品辐射损伤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。