1.本技术涉及废品在线剔除装置的领域,尤其是涉及一种应用于生产溯源系统中的自动剔除装置。
背景技术:
2.随着工业自动化的不断推进,越来越多的产品在产线上生产时就引入了生产溯源系统,其主要是通过在流水线上生产的产品的外包装上进行顺序喷码,使得同生产日期、同批次的产品可溯源,以确保单一产品质量缺陷时能快速查找出同批次产品,能显著提高企业的产品质量溯源管理。但是在通过在线喷码机对产品进行喷码时,偶有存在喷码不清晰或漏喷的现象,影响整个产线产品质量溯源系统的稳定运行。
3.相关技术中公开号为cn113118050a的中国专利,提出了一种瓶体剔除装置及瓶体检测设备,瓶体剔除装置包括:剔除传送带,剔除传送带用于带动瓶体移动;喷嘴组件,喷嘴组件的出风口朝向剔除传送带,且出风口的气流方向与剔除传送带的移动方向垂直;控制器,喷嘴组件与控制器电连接,控制器设置为控制喷嘴组件向异常瓶体喷气,异常瓶体为控制器通过图像采集组件采集的瓶体图像检测出的。该申请提供的瓶体剔除装置及瓶体检测设备,通过设置剔除传送带、喷嘴组件以及控制器,控制器能够控制喷嘴组件及时向剔除传送带喷气,实现自动剔除异常瓶体,能够提高瓶体的筛选效率。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:图像采集组件将异常瓶体检测出后,通过剔除装置将异常瓶体直接剔除,这样产品质量合格仅是未正常喷码的瓶体散落在异常产品区,后续生产人员还需要将该异常产品区的瓶体取出进行手动喷码,手动喷码过程中生产人员需要逐个调整瓶体状态以寻找合适的喷码位置,严重制约了二次补喷码的效率。
技术实现要素:
5.为了改善对未喷码完全产品进行二次喷码时操作效率低下的问题,本技术提供一种应用于生产溯源系统中的自动剔除装置。
6.本技术提供的一种应用于生产溯源系统中的自动剔除装置采用如下的技术方案:一种应用于生产溯源系统中的自动剔除装置,包括机架及所述机架上依次设置的第一图像采集组件、剔除传送带和剔除机构,所述机架对接在生产线传输系统上,所述剔除机构包括剔除底座及用于驱动所述剔除底座进行三轴运动的驱动组件,所述剔除底座上设置有:抓取组件,用于抓取异常瓶体;旋转组件,用于驱使异常瓶体转动;所述剔除机构还包括用于识别瓶体待喷码部位的第二图像采集组件、用于承载异常瓶体的托盘和第一控制器,所述第二图像采集组件与所述第一控制器电连接,所述第一控制器用于控制所述旋转组件驱使异常瓶体转动或停止转动。
7.通过采用上述技术方案,喷码后的瓶体经生产线传输系统传输至剔除传送带上时,第一图像采集组件对瓶体上喷码的完整性进行检测,当检测到喷码不完整后,驱动组件驱动剔除底座运动至异常瓶体上方,抓取组件对异常瓶体进行抓取,驱动组件再驱动剔除底座移动至剔除传送带一侧以免影响后续瓶体的正常传输;在此过程中,第二图像采集组件对瓶身待喷码部位进行检测,若待喷码部位未与第二图像采集组件对准,第二图像采集组件则通过第一控制器控制旋转组件驱动以驱使异常瓶体旋转至其上的待喷码部位与第二图像采集组件对准;随后驱动组件将转向完成的异常瓶体放置在托盘上,从而使得被剔除的异常瓶体均能保持其待喷码部位同向,有利于后续生产人员对这些异常瓶体进行手持喷码,极大提高了人工二次喷码时的便利性和高效性。
8.可选的,所述机架上架设有位于所述剔除传送带正上方的剔除架,所述剔除架长度方向与瓶体运输路线呈正交设置,所述剔除架上设置有两组分列所述剔除传送带输送方向两侧的所述剔除机构。
9.通过采用上述技术方案,两组剔除机构同时作业,使得本技术能适用于连续性的异常瓶体的剔除。
10.可选的,所述旋转组件包括固接在所述剔除底座上的回转气缸,所述抓取组件安装于所述回转气缸的输出端上,所述回转气缸与所述第一控制器电连接。
11.通过采用上述技术方案,第二图像采集组件检测到异常瓶体的待喷码部位未与第二图像采集组件对准时,通过第一控制器控制回转气缸旋转直至异常瓶体的待喷码部位与第二图像采集组件对准,回转气缸停止作业,可实现对异常瓶体的稳定转动调整效果。
12.可选的,所述抓取组件包括抓取座以及铰接在所述抓取座轴向上的多个抓取臂,所述抓取臂呈弯折状且其弯折部铰接在所述抓取座上,多个所述抓取臂远离所述抓取座的一端用于共同抱合、抓取瓶体,所述抓取座中部设置有用于驱动多个所述抓取臂上端同步升降的升降件。
13.通过采用上述技术方案,驱动组件驱动剔除底座运动至异常瓶体上方并驱使剔除底座下降以使多个抓取臂环绕在异常瓶体周侧后,升降件驱动多个抓取臂上端同步上移,多个抓取臂下端同步靠近以对异常瓶体进行抱合、抓取,实现了对异常瓶体的稳定抓取效果。
14.可选的,所述升降件包括固接在所述抓取座上的直线驱动件,所述直线驱动件的动力端贯穿所述抓取座且其自由端固接有连接环,所述连接环弧面周侧竖向固接有多个与多个所述抓取臂一一对应的导向块,所述导向块上贯穿开设有沿其长度方向的导向槽,所述抓取臂靠近所述抓取座的一端设置有滑动设置在所述导向槽内的铰头。
15.通过采用上述技术方案,直线驱动件驱动连接环上移时,拉动铰头在其导向块的导向槽内滑动,进而带动抓取臂在抓取座上翻转,以实现多个抓取臂的同步抱合,并且导向槽的设置有利于抓取臂在翻转时其上端部移动轨迹的变化,能有效防止抓取臂翻转时的卡顿现象。
16.可选的,所述抓取臂下端设置有用于扣紧瓶体的瓶口的弧形抓块。
17.通过采用上述技术方案,弧形抓块的设置有利于实现对瓶体的瓶口处的抱合,使得多个抓取臂在对异常瓶体进行抓取后,异常瓶体较难自住抓取臂上脱落,尤其适用于瓶体自重较大的情况,确保了抓取组件对异常瓶体的稳定抓取效果。
18.可选的,所述驱动组件包括固接在所述剔除架上的第一导轨,所述第一导轨沿所述剔除架长度方向设置,两个所述剔除底座同时滑动设置在所述第一导轨上,所述剔除底座上设置有用于驱动所述剔除底座在所述第一导轨上滑动的x轴驱动件,两个所述x轴驱动件共同连接有第二控制器,所述第二控制器与所述第一图像采集组件电连接,所述第二控制器轮流控制两个所述x轴驱动件工作。
19.通过采用上述技术方案,第一图像采集组件检测到异常瓶体上的喷码不完整后,通过第二控制器控制其中一个x轴驱动件作业,以使该x轴驱动件对应的剔除底座行进至异常瓶体上方,将该异常瓶体转移至剔除传送带一侧;当第一图像采集组件连续检测到第二个异常瓶体时,通过第二控制器控制另一个x轴驱动件作业,从而两个剔除机构协同作业,准确衔接了剔废作业过程中的时间差,使得本技术能适用于高速产线上的剔除作业。
20.可选的,所述托盘上滑动设置有多个呈长条状的托板,多个所述托板沿其宽度方向依次排列,所述托板长度方向的端部固接有拉手,所述拉手设置在所述托板靠近所述第二图像采集组件一侧的邻侧。
21.通过采用上述技术方案,异常瓶体经剔废机构旋转并转移至托板上排列后,多个异常瓶体的待喷码部位同向,从而作业人员可以抽动托板将码放整体的一列异常瓶体至托盘上抽出以进行检测和二次喷码;并且由于拉手设置在托板长度方向的端部且拉手位于述托板靠近第二图像采集组件一侧的邻侧,从而拉出的托板上的多个异常瓶体的待喷码部位直接沿托板长度方向依次直接陈列在生产人员面前,进一步提高了生产人员在进行二次喷码时的便捷性。
22.可选的,所述托板长度方向两端的下端面均固接有托脚,所述托盘上端面固接有与所述托脚滑动适配的滑槽,靠近所述拉手的所述托脚下端面与所述托盘下端面平齐。
23.通过采用上述技术方案,生产人员在托盘上抽出托板时,对应于拉手的托脚能对悬空的托板端部进行支撑以使托板保持水平;位于托盘内滑槽中的托脚在跟随托板滑动时,可起到限位作用,以防托板被直接拉出。
24.综上所述,本技术包括以下至少一种有益技术效果:1.第一图像采集组件检测到异常瓶体的喷码不完整后,抓取组件对异常瓶体进行抓取并转移至剔除传送带一侧,第二图像采集组件对瓶身待喷码部位进行检测,旋转组件受控启动以驱使异常瓶体旋转至其上的待喷码部位与第二图像采集组件对准,随后驱动组件将转向完成的异常瓶体放置在托盘上,从而使得被剔除的异常瓶体均能保持其待喷码部位同向,有利于后续生产人员对这些异常瓶体进行手持喷码,极大提高了人工二次喷码时的便利性和高效性;2.抓取臂上弧形抓块的设置有利于实现对瓶体的瓶口处的抱合,使得多个抓取臂在对异常瓶体进行抓取后,异常瓶体较难自住抓取臂上脱落,尤其适用于瓶体自重较大的情况,确保了抓取组件对异常瓶体的稳定抓取效果;3.两个剔除机构协同作业,准确衔接了剔废作业过程中的时间差,使得本技术能适用于高速产线上的剔除作业。
附图说明
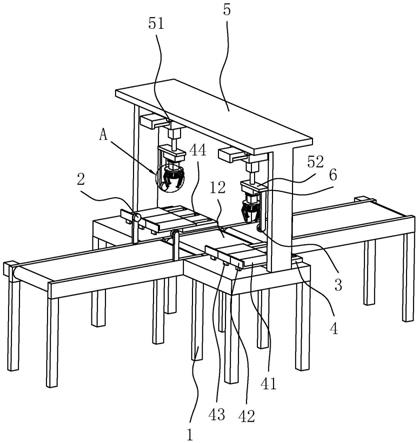
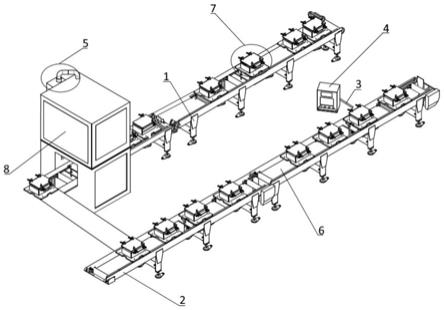
25.图1是本技术实施例的整体结构示意图。
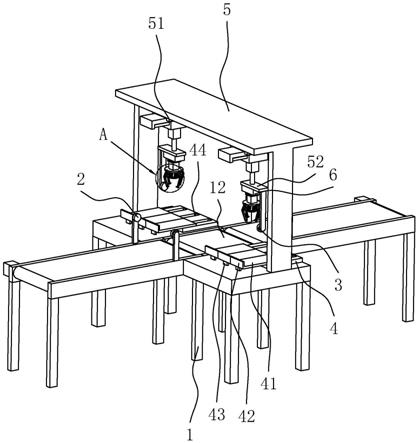
26.图2是图1中a部分的局部放大示意图。
27.附图标记:1、机架;12、剔除传送带;2、第一图像采集组件;3、第二图像采集组件;4、托盘;41、托板;42、拉手;43、托脚;44、滑槽;5、剔除架;51、第一导轨;52、剔除底座;6、回转气缸;71、抓取座;72、抓取臂;73、直线驱动件;74、连接环;75、导向块;76、导向槽;77、铰头;78、弧形抓块。
具体实施方式
28.以下结合附图1
‑
2对本技术作进一步详细说明。
29.本技术实施例公开一种应用于生产溯源系统中的自动剔除装置。参照图1和图2,应用于生产溯源系统中的自动剔除装置包括机架1及机架1上依次设置的第一图像采集组件2、剔除传送带12和剔除机构,机架1对接在生产线传输系统上,剔除传送带12的输送方向与生产线传输方向一致。剔除机构包括剔除底座52及用于驱动剔除底座52进行三轴运动的驱动组件,剔除底座52上设置有:用于抓取异常瓶体的抓取组件、用于驱使异常瓶体转动的旋转组件;剔除机构还包括用于识别瓶体待喷码部位的第二图像采集组件3、用于承载异常瓶体的托盘4和第一控制器,第二图像采集组件3与第一控制器电连接,第一控制器用于控制旋转组件驱使异常瓶体转动或停止转动。
30.参照图1和图2机架1上架设有位于剔除传送带12正上方的剔除架5,剔除架5长度方向与瓶体运输路线呈正交设置,剔除架5上设置有两组分列剔除传送带12输送方向两侧的剔除机构。驱动组件包括固接在剔除架5上的第一导轨51,第一导轨51沿剔除架5长度方向设置,两个剔除底座52同时滑动设置在第一导轨51上,剔除底座52上设置有用于驱动剔除底座52在第一导轨51上滑动的x轴驱动件,两个x轴驱动件共同连接有第二控制器,第二控制器与第一图像采集组件2电连接,第二控制器轮流控制两个x轴驱动件工作。
31.从而喷码后的瓶体经生产线传输系统传输至剔除传送带12上时,第一图像采集组件2对瓶体上喷码的完整性进行检测,当检测到瓶体上的喷码不完整后,通过第二控制器控制其中一个x轴驱动件作业,以使该x轴驱动件对应的剔除底座52行进至异常瓶体上方,抓取组件对异常瓶体进行抓取,驱动组件再驱动剔除底座52移动至剔除传送带12一侧以免影响后续瓶体的正常传输;在此过程中,第二图像采集组件3对瓶身待喷码部位进行检测,若待喷码部位未与第二图像采集组件3对准,第二图像采集组件3则通过第一控制器控制旋转组件驱动以驱使异常瓶体旋转至其上的待喷码部位与第二图像采集组件3对准;随后驱动组件将转向完成的异常瓶体放置在托盘4上,从而使得被剔除的异常瓶体均能保持其待喷码部位同向,有利于后续生产人员对这些异常瓶体进行手持喷码,极大提高了人工二次喷码时的便利性和高效性。并且当第一图像采集组件2连续检测到第二个异常瓶体时,通过第二控制器控制另一个x轴驱动件作业,从而两个剔除机构协同作业,准确衔接了剔废作业过程中的时间差,使得本技术能适用于高速产线上的剔除作业。
32.具体的,参照图1和图2旋转组件包括固接在剔除底座52上的回转气缸6,抓取组件安装于回转气缸6的输出端上,回转气缸6与第一控制器电连接;抓取组件包括抓取座71以及铰接在抓取座71轴向上的多个抓取臂72,多个抓取臂72以抓取座71外周侧等间距布设,抓取臂72呈弯折状且其弯折部铰接在抓取座71上,多个抓取臂72远离抓取座71的一端用于共同抱合、抓取瓶体。抓取座71中部设置有用于驱动多个抓取臂72上端同步升降的升降件,
升降件包括固接在抓取座71上的直线驱动件73,直线驱动件73可以为气缸、电动推杆和液压缸中的任意一种。
33.并且为避免直线驱动件73驱动抓取臂72上端升降时发生卡顿,参照图1和图2直线驱动件73的动力端贯穿抓取座71且其自由端固接有连接环74,连接环74弧面周侧竖向固接有多个与多个抓取臂72一一对应的导向块75,导向块75上贯穿开设有沿其长度方向的导向槽76,抓取臂72靠近抓取座71的一端设置有滑动设置在导向槽76内的铰头77;从而驱动组件驱动剔除底座52运动至异常瓶体上方并驱使剔除底座52下降以使多个抓取臂72环绕在异常瓶体周侧后,直线驱动件73驱动连接环74上移,拉动铰头77在其导向块75的导向槽76内滑动,进而带动抓取臂72在抓取座71上翻转,以实现多个抓取臂72的同步抱合,并且导向槽76的设置有利于抓取臂72在翻转时其上端部移动轨迹的变化,能有效防止抓取臂72翻转时的卡顿现象,多个抓取臂72下端同步靠近以对异常瓶体进行抱合、抓取时,实现了对异常瓶体的稳定抓取效果。
34.而为避免瓶体内盛装重物后,多个抓取臂72共同抓取瓶体时发生瓶体滑脱现象,参照图1和图2抓取臂72下端设置有用于扣紧瓶体的瓶口的弧形抓块78,具体的,由于大多数瓶体的瓶口处均设置有环状凸缘,可在弧形抓块78下端内弧壁也设置凸沿,使得多个抓取臂72在对多个瓶体进行抱合时,弧形抓块78上的凸沿能与环状凸缘形成卡接,能有效防止被抓取后的瓶体的滑脱现象。
35.在其他可行的实施例中,还可以在弧形抓块78内弧壁设置橡胶层,并使橡胶层内弧壁呈磨砂状或者设置防滑纹,进一步增加弧形抓块78与瓶体抵紧时二者之间的静摩擦力。
36.为便于生产人员能便捷快速地对剔除出的异常瓶体进行人工打码,参照图1,托盘4上滑动设置有多个呈长条状的托板41,多个托板41沿其宽度方向依次排列,托板41长度方向的端部固接有拉手42,拉手42设置在托板41靠近第二图像采集组件3一侧的邻侧。托板41长度方向两端的下端面均固接有托脚43,托盘4上端面固接有与托脚43滑动适配的滑槽44,靠近拉手42的托脚43下端面与托盘4下端面平齐。
37.从而异常瓶体经剔废机构旋转并转移至托板41上排列后,多个异常瓶体的待喷码部位同向,从而作业人员可以抽动托板41将码放整体的一列异常瓶体至托盘4上抽出以进行检测和二次喷码,托板41被拉出时,对应于拉手42的托脚43能对悬空的托板41端部进行支撑以使托板41保持水平;位于托盘4内滑槽44中的托脚43在跟随托板41滑动时,可起到限位作用,以防托板41被直接拉出。
38.并且由于拉手42设置在托板41长度方向的端部且拉手42位于述托板41靠近第二图像采集组件3一侧的邻侧,从而拉出的托板41上的多个异常瓶体的待喷码部位直接沿托板41长度方向依次直接陈列在生产人员面前,进一步提高了生产人员在进行二次喷码时的便捷性。
39.作为用于驱动剔除底座52进行三轴运动的驱动组件,其实质与本领域常规技术手段无异,例如用于实现剔除底座52做x轴运动的x轴驱动件、用于实现剔除底座52做y轴运动的y轴驱动件以及用于驱动剔除底座52做z轴运动的z轴驱动件都可以直接设置为直线电机,或者设置为x轴运动、y轴运动为齿轮齿条驱动结构、z轴运动为气缸驱动结构。
40.本技术实施例应用于生产溯源系统中的自动剔除装置的实施原理为:第一图像采
集组件2检测到异常瓶体的喷码不完整后,多个抓取臂72对异常瓶体进行抓取并转移至剔除传送带12一侧,第二图像采集组件3对瓶身待喷码部位进行检测,回转气缸6受控启动以驱使异常瓶体旋转至其上的待喷码部位与第二图像采集组件3对准,随后驱动组件将转向完成的异常瓶体放置在托盘4上,从而使得被剔除的异常瓶体均能保持其待喷码部位同向,有利于后续生产人员对这些异常瓶体进行手持喷码,极大提高了人工二次喷码时的便利性和高效性。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。