1.本发明涉及工程机械安全防护技术领域,尤其涉及一种工程机械用防碰撞系统。
背景技术:
2.工程机械是土石方施工、路面建设与养护和各种建筑工程施工中所必需的机械装备。在许多施工现场,各种工程机械如:挖掘机、推土机和压路机等设备的。工程施工往往带有突击性,为了按时完成工程的施工进度,施工单位会要求操作人员加班或延长工作时间。工程机械作业人员每天的劳动时间基本都在8
‑
10小时,有时每天工作长达12小时,甚至超过14小时。每天的持续长时间工作会带来身体和精神上的疲劳,身心疲劳会降低施工作业精度,影响作业效率。例如振动压路机,作为一种高效的压实机械,越来越广泛的应用于道路和水坝的施工建设中。在压路机的作业过程中,通常会有施工人员和工程车辆进入作业区域,压路机在作业区域外变道和转向时也会有人员和车辆进入压路机行驶路径中。然而在施工作业中,压路机驾驶员操作人员每天需坐在驾驶室里,忍受充满噪声和扬尘的恶劣工作环境,工作长达十几个小时;而且,由于工程施工多位于室外,酷暑和寒冷、雨水和大风等天气因素还会加剧恶化现场的工作环境;此外驾驶员操作单一重复,容易产生驾驶疲劳;上述因素都很容易导致驾驶员对突发情况无法做出及时处理造成安全事故。
技术实现要素:
3.本发明的目的在于提供一种工程机械用防碰撞系统,有效避免碰撞。
4.实现上述目的的技术方案是:
5.一种工程机械用防碰撞系统,包括:
6.安装于工程机械前后,用于采集前作业区域和后作业区域内障碍物信息的数据采集机构;
7.根据所述障碍物信息进行障碍物检测,并在存在障碍物时输出紧急制动指令和危险警报指令的主控制器;
8.根据所述紧急制动指令对工程机械进行紧急制动的制动系统;以及
9.根据所述危险警报指令发出警报的报警装置。
10.优选的,还包括工控机,所述工控机接收来自所述主控制器发送的障碍物信息并进行实时监控;
11.所述工控机发送第一制动指令给主控制器;所述主控制器根据第一制动指令发送相应指令给所述制动系统进行相应动作。
12.优选的,所述数据采集机构包括安装于工程机械前面并水平排列的三个超声波传感器,以及安装于工程机械后面并水平排列的三个超声波传感器。
13.优选的,所述超声波传感器分为前左超声波传感器、前中超声波传感器、前右超声波传感器、后左超声波传感器、后中超声波传感器和后右超声波传感器,超声波传感器的超声波单侧发射角度为13
°
,检测距离为8米。
14.优选的,所述前左超声波传感器位于工程机械前侧,距离工程机械中轴线左侧0.6米处;
15.所述前中超声波传感器位于工程机械前侧,中轴线位置处;
16.所述前右超声波传感器位于工程机械前侧,距离工程机械中轴线右侧0.6米处;
17.所述后左超声波传感器位于工程机械后侧,距离工程机械中轴线左侧0.6米处;
18.所述后中超声波传感器位于工程机械后侧,中轴线位置处;
19.所述后右超声波传感器位于工程机械后侧,距离工程机械中轴线右侧0.6米处。
20.优选的,所述障碍物信息指高电平信号或低电平信号,当存在障碍物时所述超声波传感器发送高电平信号;当不存在障碍物时所述超声波传感器发送低电平信号;
21.所述主控制器检测所述障碍物信息为高电平信号还是低电平信号,当为高电平信号时,所述主控制器输出紧急制动指令和危险警报指令。
22.本发明的有益效果是:本发明通过有效的障碍物信息采集,反应速度快,实时性强。当工程机械未检测到有障碍物进入到传感器区域时,会继续沿着当前路径行驶或作业;当检测到有障碍物进入到传感器区域时,工程机械会优先执行停车等待动作。当检测到障碍物停车后,会定时更新三个传感器数据。在无障碍物时继续作业。本发明自动化程度高,当主控制器检测到有障碍物进入超声波传感器的检测范围,且工控机没有给出停车等待或避障的运行指示时,主控制器会优先执行停车动作。之后进行每秒对障碍物的重复扫描、数据更新,直至障碍物运动出工作区域后,解除警报和制动,工程机械可继续工作。本发明采用前左、前中、前右、后左、后中、后右六个超声波传感器;并相邻各传感器间隔0.6m,超声波单侧发射角度为13
°
,检测距离为8米,超声波传感器检测区域能够有效覆盖工程机械前后的工作区域,且6个超声波传感器共同检测,任一传感器检测到障碍物的信息就会反馈给主控制器,并激发制动系统,能够有效反馈工作区域内的任一障碍物信息。推广于广大的工程机械的应用中,将会大大降低相关安全事故的发生。
附图说明
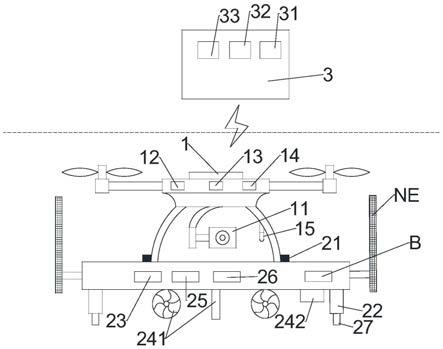
23.图1是本发明的工程机械用防碰撞系统的结构图;
24.图2是本发明中超声波传感器检测范围俯视示意图。
具体实施方式
25.下面将结合附图对本发明作进一步说明。
26.请参阅图1和图2,本发明的工程机械用防碰撞系统,包括:数据采集机构1、主控制器2、制动系统3和报警装置4、工控机5。
27.数据采集机构1安装于工程机械前后,用于采集前作业区域和后作业区域内障碍物信息。主控制器2根据所述障碍物信息进行障碍物检测,并在存在障碍物时输出紧急制动指令和危险警报指令。制动系统3根据所述紧急制动指令对工程机械进行紧急制动。报警装置4根据所述危险警报指令发出警报。
28.工控机5工控机接收来自主控制器1发送的障碍物信息并进行实时监控。同时,工控机5发送第一制动指令给主控制器1;所述主控制器1根据第一制动指令发送相应指令给制动系统3进行相应动作。
29.数据采集机构1包括安装于工程机械前面并水平排列的三个超声波传感器,以及安装于工程机械后面并水平排列的三个超声波传感器。超声波传感器分为前左超声波传感器、前中超声波传感器、前右超声波传感器、后左超声波传感器、后中超声波传感器和后右超声波传感器,每个超声波传感器的超声波单侧发射角度为13
°
,检测距离为8米。例如:
30.前左超声波传感器位于工程机械前侧,距离工程机械中轴线左侧0.6米处,其检测区域为以超声波传感器为圆心,圆心角为13
°
,半径为8米的扇形区域。前中超声波传感器位于工程机械前侧,中轴线位置处,其检测区域为以超声波传感器为圆心,圆心角为13
°
,半径为8米的扇形区域。前右超声波传感器位于工程机械前侧,距离工程机械中轴线右侧0.6米处,其检测区域为以超声波传感器为圆心,圆心角为13
°
,半径为8米的扇形区域。后左超声波传感器位于工程机械后侧,距离工程机械中轴线左侧0.6米处,其检测区域为以超声波传感器为圆心,圆心角为13
°
,半径为8米的扇形区域。后中超声波传感器位于工程机械后侧,中轴线位置处,其检测区域为以超声波传感器为圆心,圆心角为13
°
,半径为8米的扇形区域。后右超声波传感器位于工程机械后侧,距离工程机械中轴线右侧0.6米处,其检测区域为以超声波传感器为圆心,圆心角为13
°
,半径为8米的扇形区域。
31.上述的障碍物信息指高电平信号或低电平信号,当存在障碍物时所述超声波传感器发送高电平信号;当不存在障碍物时所述超声波传感器发送低电平信号。主控制器2检测所述障碍物信息为高电平信号还是低电平信号,当为高电平信号时,主控制器2输出紧急制动指令和危险警报指令。
32.如图2所示,工程机械前进时工作原理:
33.在工程机械前进时,前面三个超声波传感器装置用于扫描工作区域内的障碍物信息,扫描区域共分为六个,若六个扫描区域内均无障碍物信息,工程机械正常工作;若六个扫描区域内
①
区域存在障碍物,此时前左超声波传感器会发送高电平给主控制器2,若工控机5没有紧急制动命令,主控制器2会根据此高电平下达紧急制动命令;若六个扫描区域内
②
区域存在障碍物,此时前左超声波传感器和前中超声波传感器会发送高电平给主控制器2,若工控机5没有紧急制动命令,其二者任一高电平均会促使主控制台下达紧急制动命令,具体取决于其反馈信号时间先后顺序;若六个扫描区域内
③
区域存在障碍物,此时前左超声波传感器、前中超声波传感器和前右超声波传感器均会会发送高电平给主控制器2,若工控机5没有紧急制动命令,其三者任一高电平均会促使主控制台2下达紧急制动命令,具体取决于其反馈信号时间先后顺序;若六个扫描区域内
④
区域存在障碍物,此时前右超声波传感器和前中超声波传感器会发送高电平给主控制器2,若工控机5没有紧急制动命令,其二者任一高电平均会促使主控制台2下达紧急制动命令,具体取决于其反馈信号时间先后顺序;若六个扫描区域内
⑤
区域存在障碍物,此时前右超声波传感器会发送高电平给主控制器2,若工控机5没有紧急制动命令,主控制器2会根据此高电平下达紧急制动命令;若六个扫描区域内
⑥
区域存在障碍物,此时前中超声波传感器会发送高电平给主控制器2,若工控机5没有紧急制动命令,主控制器1会根据此高电平下达紧急制动命令。工程机械后退时原理同上。
34.当检测到障碍物后停车,会每隔1s更新三个传感器数据。若有传感器前1s数据与现在的数据变化幅度超过10cm,则认为障碍物处于运动状态,并对前1s的传感器数据进行更新。若前后两次数据变化小于设定值,则不对前并对前1s的传感器数据进行更新。当三个
传感器的数据变化都小于设定值时,启动定时器,其设定时间为5s。在计时过程中,若有传感器数据变化超过设定值则复位定时器,反之则继续计时。工程机械会循环对障碍物进行检测,等待运动物体离开传感器检测区域后再继续进行作业。
35.以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本发明的范畴,应由各权利要求所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。