1.本发明涉及海洋监测技术领域,特别是涉及一种广域海洋监测设备。
背景技术:
2.随着陆地资源日益枯竭,人类将目光转向了资源更加丰富的海洋,因为洋流是在不断变化的,这对人类的研究提出了更高的要求。而海洋数据监测作为一项基础研究手段,是人类走向海洋的重要基础,如何能提供更加准确、覆盖范围更广、全天候稳定工作的海洋监测设备一直是海洋领域研究的重点。
3.现有的海洋监测数据采集与传输设备常利用漂浮平台或无人机进行监测,漂浮平台具有待机时间长、成本低、可持续测量水下数据的优势,而无人机具有工作范围广、速度快的优势,但是同时又各有缺陷,如漂浮平台的监测范围、航速、无人机的续航里程等。
技术实现要素:
4.本发明的目的是提供一种广域海洋监测设备,将无人机与漂浮平台的优势互补,同时弥补各自的不足,以实现对海洋内部水质及表面环境进行全天候、大范围的监测。
5.为实现上述目的,本发明提供了如下方案:
6.一种广域海洋监测设备,包括:无人机、漂浮平台和控制中心;
7.无人机包括摄像头、无人机定位装置、无人机通信模块和无人机控制器;摄像头用于采集海洋表面环境视频;无人机定位装置用于获取无人机的实时位置信息;无人机通信模块用于在无人机与控制中心之间进行数据和信号传输,将无人机的实时位置信息、状态信息(包括荷电状态、高度、速度、方向等)以及采集到的环境视频发送到控制中心;无人机控制器与无人机的其他部件连接,按照控制中心的指令对无人机进行控制;
8.漂浮平台包括固定装置、带有传感器模块的伸缩杆、平台定位装置、自适应巡航装置、平台通信模块和平台控制器;无人机通过固定装置的开闭可脱离地固定在漂浮平台上;伸缩杆设置在漂浮平台靠近海水的一侧,在伸缩杆下端的传感器模块用于采集海洋环境数据;平台定位装置用于对漂浮平台进行实时跟踪定位;自适应巡航装置用于驱动漂浮平台按照预定的线路行进;平台通信模块用于在漂浮平台与控制中心之间进行数据和信号传输,将漂浮平台的实时位置信息、状态信息(包括航速、方向、荷电状态等)以及采集到的海洋环境数据发送到控制中心;平台控制器与平台的其他部件连接,按照控制中心的指令对平台进行控制;
9.控制中心包括上位通信模块、存储器和处理器;上位通信模块用于接收无人机和漂浮平台发来的数据,并对无人机和漂浮平台发送控制指令;存储器用于对无人机和漂浮平台发送的数据进行存储;处理器用于对上述数据进行加工和处理,以生成控制指令。
10.可选地,处理器通过对无人机和漂浮平台的位置信息进行处理,从而对悬浮平台进行路径规划。
11.可选地,控制中心通过对于无人机所在位置、漂浮平台所在位置、无人机的荷电状
态(soc)、漂浮平台的航速的监控,对于无人机的安全性进行评估,当无人机的待机时间大于漂浮平台的抵达时间,则无人机选择悬停模式等待漂浮平台到达;当无人机的待机时间小于漂浮平台的抵达时间,则选择返航模式按照规划好的路径反向飞行至漂浮平台。
12.可选地,自适应巡航装置包括驱动装置和避障装置,其中驱动装置包括螺旋桨和舵,避障装置包括设置于漂浮平台下部的声呐探测器,用于收集漂浮平台附近的障碍物信息,以实现漂浮平台的自适应巡航。
13.可选地,漂浮平台还包括供电装置b,供电装置b用于为漂浮平台和无人机提供电能。
14.可选地,漂浮平台还包括新能源发电系统ne,新能源发电系统ne设置在漂浮平台上,其与供电装置b连接以便为供电装置b充电。
15.可选地,新能源发电系统ne为太阳能发电系统或者风力发电系统。
16.可选地,无人机还具有机载浮标,机载浮标可以发射位置信号,当无人机定位装置或者无人机通信模块发生故障时,无人机控制器可以自动开启机载浮标,并将其投放在无人机所在的目标位置,控制中心可以通过机载浮标所在的位置对漂浮平台进行导航,完成对于目标位置的海洋数据采集。
17.本发明还提供一种广域海洋监测方法,包括如下步骤:
18.s1,控制中心将欲采集位置信息通过上位通信模块发送给漂浮平台,平台控制器控制自适应巡航装置,驱动漂浮平台与无人机一起到达欲采集位置,开始采集海洋环境数据,平台通信模块将漂浮平台的实时位置信息、状态信息以及采集到的海洋环境数据发送到控制中心;
19.s2,控制中心将巡视指令通过上位通信模块发送给无人机和漂浮平台,平台控制器控制固定装置开启,无人机控制器控制无人机起飞,控制中心遥控无人机对海洋表面环境视频进行采集,无人机通信模块将无人机的实时位置信息、状态信息以及采集到的海洋表面环境视频发送到控制中心;
20.s3,当无人机巡视过程中发现更佳海洋环境数据监测点时,控制无人机悬停,将监测点的位置信息作为目标位置信息上传至控制中心,控制中心进行路径规划并将路径规划指令通过上位通信模块发送至漂浮平台,平台控制器按照路径规划指令控制漂浮平台向目标位置行进;
21.s4,漂浮平台到达目标位置后,再次进行海洋环境数据采集。
22.步骤s1还包括,平台控制器控制固定装置关闭,将无人机固定于漂浮平台上,同时控制伸缩杆抬出水面高度,当漂浮平台与无人机一起到达指定位置后,平台控制器控制伸缩杆伸入水面下预定的深度开始数据采集,平台控制器可以通过伸缩杆来控制传感器模块在水下的深度。
23.在步骤s3之后,还具有步骤s3
‑
1,控制中心通过对于无人机所在位置、漂浮平台所在位置、无人机1的荷电状态(soc)、漂浮平台的航速的监控,对于无人机的安全性进行评估,当无人机的待机时间大于漂浮平台的抵达时间,则无人机选择悬停模式等待漂浮平台到达;当无人机的待机时间小于漂浮平台的抵达时间,则选择返航模式按照规划好的路径反向飞行至漂浮平台。
24.在步骤s3
‑
1之后,还具有步骤s3
‑
2,当无人机与漂浮平台汇合后,无人机降落至漂
浮平台,并且平台控制器控制固定装置关闭,将无人机固定于漂浮平台。
25.步骤s3还包括,平台控制器收到路径规划指令后,控制自适应巡航装置,即控制驱动装置和避障装置,驱动漂浮平台到达预定位置。
26.根据本发明提供的方案,本发明公开了以下技术效果:
27.本发明提供的广域海洋监测设备,通过无人机和漂浮平台的协同作用,有效扩大了漂浮平台的监测范围,并解决了无人机续航里程的短板,实现对海洋内部水质及表面环境进行全天候、大范围的监测。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
29.图1为本发明广域海洋监测设备结构示意图;
30.图2为本发明广域海洋监测方法的流程图。
31.附图标记:无人机1、漂浮平台2、控制中心3、摄像头11、无人机定位装置12、无人机通信模块13、无人机控制器14、机载浮标15、固定装置21、伸缩杆22、平台定位装置23、自适应巡航装置24、驱动装置241、避障装置242、平台通信模块25、平台控制器26、传感器模块27、上位通信模块31、存储器32、处理器33、新能源发电系统ne、供电装置b。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的是提供一种广域海洋监测设备,以实现对海洋内部水质及表面环境进行全天候、大范围的监测。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
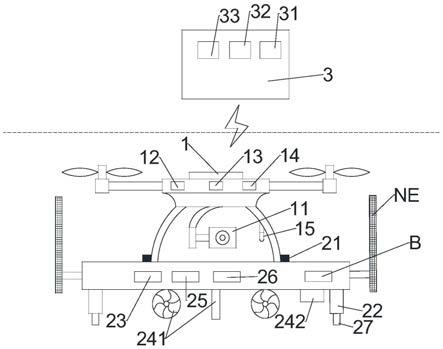
35.如图1所示,本发明提供的一种广域海洋监测设备,包括:无人机1、漂浮平台2和控制中心3;
36.无人机1包括摄像头11、无人机定位装置12、无人机通信模块13和无人机控制器14;摄像头11用于采集海洋表面环境视频;无人机定位装置12用于获取无人机的实时位置信息;无人机通信模块13用于在无人机1与控制中心3之间进行数据和信号传输,将无人机1的实时位置信息、状态信息(包括荷电状态、高度、速度、方向等)以及采集到的环境视频发送到控制中心3;无人机控制器14与无人机1的其他部件连接,按照控制中心3的指令对无人机1进行控制;
37.漂浮平台2包括固定装置21、带有传感器模块27的伸缩杆22、平台定位装置23、自适应巡航装置24、平台通信模块25和平台控制器26;无人机1通过固定装置21的开闭可脱离
地固定在漂浮平台2上;伸缩杆22设置在漂浮平台靠近海水的一侧,在伸缩杆22下端的传感器模块27用于采集海洋环境数据;平台定位装置23用于对漂浮平台2进行实时跟踪定位;自适应巡航装置24用于驱动漂浮平台2按照预定的线路行进;平台通信模块25用于在漂浮平台2与控制中心3之间进行数据和信号传输,将漂浮平台2的实时位置信息、状态信息(包括航速、方向、荷电状态等)以及采集到的海洋环境数据发送到控制中心3;平台控制器26与平台2的其他部件连接,按照控制中心3的指令对平台2进行控制;
38.控制中心3包括上位通信模块31、存储器32和处理器33;上位通信模块31用于接收无人机1和漂浮平台2发来的数据,并对无人机1和漂浮平台2发送控制指令;存储器32用于对无人机1和漂浮平台2发送的数据进行存储;处理器33用于对上述数据进行加工和处理,以生成控制指令。
39.在实际应用中,处理器33通过对无人机1和漂浮平台2的位置信息进行处理,从而对悬浮平台2进行路径规划。
40.在实际应用中,控制中心3通过对于无人机1所在位置、漂浮平台2所在位置、无人机1的荷电状态(soc)、漂浮平台2的航速的监控,对于无人机1的安全性进行评估,当无人机1的待机时间大于漂浮平台2的抵达时间,则无人机1选择悬停模式等待漂浮平台2到达;当无人机1的待机时间小于漂浮平台2的抵达时间,则选择返航模式按照规划好的路径反向飞行至漂浮平台2。
41.在实际应用中,自适应巡航装置24包括驱动装置241和避障装置242,其中驱动装置241包括螺旋桨和舵,避障装置242包括设置于漂浮平台2下部的声呐探测器,用于收集漂浮平台2附近的障碍物信息,以实现漂浮平台2的自适应巡航。
42.在实际应用中,传感器模块27包括ph值检测器、硅酸盐检测器和硝酸盐检测器。
43.在实际应用中,漂浮平台2还包括风速传感器和加速度传感器;风速传感器和加速度传感器均与平台控制器26连接;风速传感器用于测量海面风速;加速度传感器用于确定海浪信息。
44.在实际应用中,漂浮平台2还包括供电装置b,供电装置b用于为漂浮平台2和无人机1提供电能。
45.在实际应用中,漂浮平台2还包括新能源发电系统ne,新能源发电系统ne设置在漂浮平台2上,其与供电装置b连接以便为供电装置b充电。
46.在实际应用中,新能源发电系统ne为太阳能发电系统或者风力发电系统。
47.在实际应用中,无人机1还具有机载浮标15,机载浮标15可以发射位置信号,当无人机定位装置12或者无人机通信模块13发生故障时,无人机控制器14可以自动开启机载浮标15,并将其投放在无人机1所在的目标位置,控制中心3可以通过机载浮标15所在的位置对漂浮平台2进行导航,完成对于目标位置的海洋数据采集。
48.在实际应用中,在漂浮平台2上还设有计时器,计时器设定时间阈值,当到达时间阈值时,控制器控制固定装置21打开,并控制无人机1飞行以采集海面的环境视频,平台控制器26还控制伸缩杆22打开以采集海平面以下的海洋环境数据。
49.如图2所示,本发明还提供的一种广域海洋监测方法,包括如下步骤:
50.s1,控制中心3将欲采集位置信息通过上位通信模块31发送给漂浮平台2,平台控制器26控制自适应巡航装置24,驱动漂浮平台2与无人机1一起到达欲采集位置,开始采集
海洋环境数据,平台通信模块25将漂浮平台2的实时位置信息、状态信息以及采集到的海洋环境数据发送到控制中心3;
51.s2,控制中心3将巡视指令通过上位通信模块31发送给无人机1和漂浮平台2,平台控制器26控制固定装置21开启,无人机控制器14控制无人机1起飞,控制中心3遥控无人机对海洋表面环境视频进行采集,无人机通信模块13将无人机1的实时位置信息、状态信息以及采集到的海洋表面环境视频发送到控制中心3;
52.s3,当无人机1巡视过程中发现更佳海洋环境数据监测点时,控制无人机1悬停,将监测点的位置信息作为目标位置信息上传至控制中心3,控制中心3进行路径规划并将路径规划指令通过上位通信模块31发送至漂浮平台2,平台控制器26按照路径规划指令控制漂浮平台2向目标位置行进;
53.s4,漂浮平台2到达目标位置后,再次进行海洋环境数据采集。
54.在步骤s3之后,还具有步骤s3
‑
1,控制中心3通过对于无人机1所在位置、漂浮平台2所在位置、无人机1的荷电状态(soc)、漂浮平台2的航速的监控,对于无人机1的安全性进行评估,当无人机1的待机时间大于漂浮平台2的抵达时间,则无人机1选择悬停模式等待漂浮平台2到达;当无人机1的待机时间小于漂浮平台2的抵达时间,则选择返航模式按照规划好的路径反向飞行至漂浮平台2。
55.在步骤s3
‑
1之后,还具有步骤s3
‑
2,当无人机1与漂浮平台2汇合后,无人机1降落至漂浮平台2,并且平台控制器26控制固定装置21关闭,将无人机1固定于漂浮平台2。
56.步骤s1还包括,平台控制器26控制固定装置21关闭,将无人机1固定于漂浮平台2上,同时控制伸缩杆22抬出水面高度,当漂浮平台2与无人机1一起到达指定位置后,平台控制器26控制伸缩杆22伸入水面下预定的深度开始数据采集,平台控制器26可以通过伸缩杆22来控制传感器模块27在水下的深度。
57.步骤s3还包括,平台控制器26收到路径规划指令后,控制自适应巡航装置24,即控制驱动装置241和避障装置242,驱动漂浮平台2到达预定位置。
58.下面将结合具体实施例对本发明的工作过程进行详细地说明。
59.当仅需要漂浮平台2进行海洋内部环境信息采集时,控制中心3将欲采集位置信息通过上位通信模块31发送给漂浮平台2,平台控制器26控制固定装置21关闭,将无人机1固定于漂浮平台2上,同时控制伸缩杆22抬出水面高度,平台控制器26根据控制中心3发来的指令对自适应巡航装置24进行控制,即控制驱动装置241和避障装置242,驱动漂浮平台2到达欲采集位置。随后平台控制器26控制伸缩杆22伸入水面下预定的深度开始数据采集,平台控制器26可以通过伸缩杆22来控制传感器模块27在水下的深度,传感器模块包括ph值检测器、硅酸盐检测器和硝酸盐检测器;漂浮平台2还包括风速传感器和加速度传感器;风速传感器和加速度传感器均与平台控制器26连接;风速传感器用于测量海面风速;加速度传感器用于确定海浪信息。平台通信模块25将漂浮平台2的实时位置信息、状态信息(包括航速、方向、荷电状态等)以及采集到的海洋环境数据发送到控制中心3。
60.当需要对海洋表面环境视频进行采集时,控制中心3将巡视指令通过上位通信模块31发送给无人机1和漂浮平台2,平台控制器26控制固定装置21开启,无人机控制器14控制无人机1上电起飞,控制中心3遥控无人机进行预定范围内的巡视和视频采集。摄像头11用于在无人机1飞行时采集海洋表面的环境视频;无人机定位装置12用于获取无人机的实
时位置信息;无人机通信模块13用于在无人机1与控制中心3之间进行数据和信号传输,将无人机1的实时位置信息、状态信息(包括荷电状态、高度、速度、方向等)以及采集到的环境视频发送到控制中心3。
61.当无人机1发现更佳海洋环境数据监测点时,悬停于该位置,并将该位置信息作为目标位置信息上传至控制中心3,控制中心3的处理器33基于无人机1和漂浮平台2的位置信息,对漂浮平台2向目标位置进行路径规划,将路径规划指令通过上位通信模块31发送至漂浮平台2,平台控制器26按照路径规划指令控制漂浮平台2向目标位置行进。在航行中,平台控制器26再次控制伸缩杆22抬出水面高度,之后按照规划的路径控制自适应巡航装置24,驱动漂浮平台2到达目标位置,再次进行数据采集。
62.在完成路径规划后,控制中心3通过对于无人机1所在位置、漂浮平台2所在位置、无人机1的荷电状态(soc)、漂浮平台2的航速的监控,对于无人机1的安全性进行评估,当无人机1的待机时间大于漂浮平台2的抵达时间,则无人机1选择悬停模式等待漂浮平台2到达;当无人机1的待机时间小于漂浮平台2的抵达时间,则选择返航模式按照规划好的路径反向飞行至漂浮平台2。
63.无论选择上述两种模式的哪一种,待无人机1与漂浮平台2汇合后,无人机1降落至漂浮平台2,并且平台控制器26控制固定装置21关闭,将无人机1固定于漂浮平台2。
64.本文中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。