1.本发明涉及数字生产辅助技术领域,尤其是涉及一种基于数字孪生平台的仿真调试系统。
背景技术:
2.数字孪生的概念由美国michaelgrieves教授于2003年提出,当前的研究和应用主要集中于航空航天和汽车制造等领域的产品设计、制造车间建模、产品装配、产品质量分析和寿命预测等,并作为面向智能制造的新兴技术引起了广泛重视。数字孪生技术是以数字化的方式建立物理实体的虚拟模型,借助数据模拟物理实体在实体环境中的行为,通过虚实交互反馈、数据融合分析、决策迭代优化等手段,实现物理世界和信息世界的融合。运用数字孪生技术,可以集成复杂的制造工艺,实现“产品设计
‑
产品制造
‑
产品维护”的全生命周期的优化。随着物联网、大数据、云计算等新一代计算机技术的快速发展,实现了物理世界和信息世界之间的互通互联,数字孪生车间概念也应运而生,主要是借助与物理实体等价的数字模型对物理车间的实际生产过程进行仿真,并基于车间数字模型开展工艺设计、智能制造单元调度、排产等任务,基于网络互联与数据共享对智能化制造单元进行有效地集成和管控,实现各生产环节之间信息交互和统筹管理,从而达到有效提高产品组装质量和降低生产成本的目的。
3.目前,焊接工艺,往往是从工艺设计到加工现场执行的单向信息传递,当焊接过程中出现异常时,不能对焊接工艺进行实时调整,很容易产生焊接缺陷。且面对生产加工多样化需求,多种产品和设备在生产过程中需要多次换型,而每次换型时的参数设置也均需要调整,故亟须设计出一个用于换型仿真调试,对提高焊接质量具有重大意义。
技术实现要素:
4.为了有效解决上面所述的换型时参数设定问题,本发明提出了一种基于数字孪生平台的仿真调试系统。
5.具体采用的技术方案如下:本发明所述的一种基于数字孪生平台的仿真调试系统,在数字孪生平台新增机器人离线仿真系统,构建满足所述数字孪生平台主框架要求的虚拟场景,ui面板和脚本代码,将所述机器人离线仿真系统集成到所述数字孪生平台中;所述机器人离线仿真系统至少包括智能控制模块,中心控制模块,离线调试模块和系统设置模块。其中,所述智能控制模块包括:主界面,用于显示生产信息,生产数据,设备状态,质量统计;状态监控界面,用于查看历史报警数据和操作日志;以及全屏显示,用于同时显示数字孪生界面及监控界面。
6.所述中心控制模块包括:整机控制单元,用于整机开启时的智能控制及参数设置;所述参数设置至少包括上料参数配置单元,用于上料制成和状态控制;加工参数配置单元,用于显示和设置加工时机器的进程参数和加工状态控制。
7.所述离线调试模块用于设置与所述系统连接的plc的配置参数,所述配置参数包括示教机器人点位配置数据,离线仿真配置数据和点位替换上传数据。
8.和所述系统设置模块,包括:修改密码界面,用于管理用户密码;账号管理,用于增加或删除用户信息;切换用户登录管理界面和程序关闭按钮。
9.其中,所述虚拟场景为从所述数字孪生平台的在线虚实同步模块中加载的全部或者部分设备三维模型;所述虚拟空间为实际车间设备的数字化映射显示进一步的,点击所述离线调试模块,在全屏显示中显示至少包括:右侧区的操作面板,左侧区的仿真信息栏,和呈现在全屏中间区域的虚拟空间,所述虚拟空间为所述虚拟场景中实际车间设备的数字化映射的显示区。
10.其中,所述操作面板,还包括:机器人名称切换键,点击下拉框进行切换视角操作机器人。
11.关节角度配置区,包括通过输入关节角度示教,点动示教和滚动条示教进行关节示教参数配置;以及通过点动步进调节按钮进行步进大小调整。
12.拖拽器按钮,通过点击拖拽器按钮生成,在所选操作机器人上生成拖拽器,按住拖拽器按钮的三个轴箭头进行机器人单方向的拖动示教。
13.以及笛卡尔坐标显示区域,用于显示当前操作机器人的笛卡尔坐标信息,及进行笛卡尔坐标上的点动示教。
14.进一步的,所述操作面板,还包括:点位操作区,包括:记录点位按钮,重命名点位,删除点位和保存点位;其中,在点位示教完成后,点击所述记录点位按钮进行记录示教好的点位,点击选中表格中记录的任意一个点位,机器人则自动跳转至该点位置,该点位字体会变成绿色,拖动表头边框可调整某列的显示宽度;点击所述重命名点位进行点位重命名;点击删除点位进行点位删除,如果点位被机器人运动指令引用则不可删除;以及在新记录示教点位后需要点击仿真信息界面,则点击保存点位进行保存磁盘操作。
15.其中,所述仿真信息栏,还包括:机器人点位,机器人末端工具和仿真程序;其中机器人点位中的点位信息与操作面板记录的点位保持一致,所述机器人末端工具显示机器人可用的机器人夹具,所述仿真程序显示已有的仿真程序。
16.点击所述机器人末端工具,则打开需要切换工具的机器人树节点,点击选中需要显示或卸载的工具节点,右键弹出菜单,选择卸载工具或装载工具。
17.所述仿真信息栏,还包括:产品型号按钮,点击所述产品型号按钮时,则弹出显示产品型号切换对话框,选择需要显示的产品模型确认后场景将显示选择的产品模型。
18.和新建程序按钮,点击所述新建程序按钮选择已有的标准仿真程序作为模板新建仿真程序,或者选择空白选项新建空白仿真程序;将完成新建的程序按钮保存后,点击对应的仿真程序弹出菜单选项包括仿真运行,重命名和删除选项进行选择;当选择仿真运行时,则弹出仿真播放控制器,选择需要仿真的机器人,点击播放按钮,被选择的机器人则按照设定的仿真程序运动;当选择重命名时则进行重命名操作;当点击删除选项时则将当前运行程序删除;以及上传信息按钮,所述仿真程序通过上传信息按钮进行选择对应的程序并上传至系统。
19.进一步的,所述选择空白选项新建空白仿真程序,还包括以下步骤:s1:选择空白选项新建仿真程序;s2:点击选中需要添加指令的机器人,右键弹出添加指令菜单;s3:添加settoollink指令设置仿真工具,然后按运动轨迹添加运动指令和工具动作,确认相应的起点,终点和仿真速度;其中,settoollink指令为设置工具指令;s4:点击保存按钮,存储当前新增程序;并点击右键程序进行仿真运行播放,查看效果;或进行属性修改;或进行指令信息删。
20.其中,所述新建空白仿真程序与点位替换操作,包括以下步骤:ss1:记录需要替换的新点位;ss2:选择标准仿真程序作为模板新建仿真程序;ss3:展开新建的仿真程序,其中,采用黄色标志可修改起点终点的指令,点击选中任一个黄色指令右键弹出修改指令属性菜单,点击修改属性选项,将终点替换成新记录的点位;ss4:点击保存按钮保存当前设置,并通过中心控制模块内选择新增的可上传仿真程序进行点位上传。
21.综上所述,本发明提供一种基于数字孪生平台的仿真调试系统,通过在数字孪生平台上新增机器人离线仿真模块,在摩擦焊接的换型生产过程中,通过本发明所述系统进行机器人程序点位的重新对位,及对虚拟机器人模型仿真验证,通过在数字孪生系统中机器人离线调试界面重新规划机器人运动轨迹,并进行仿真验证,通过集成上料plc控制系统中工件参数设定信息,在数字孪生平台上将仿真后的机器人程序替换原有程序,实现快速换型。
附图说明
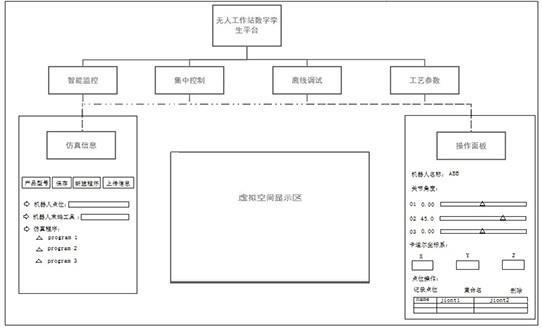
22.图1 为本发明所述的基于数字孪生平台的仿真调试系统平台示意图。
23.图2为关节示教界面。
24.图3为拖拽器示例图。
25.图4为新建仿真程序对话框。
26.图5为仿真程序右键操作示例图。
27.图6为仿真播放控制器示例图。
28.图7为程序上传对话框。
29.图8为添加指令菜单。
30.图9为添加movej指令示例。
31.图10为指令修改右键菜单。
32.图11为展开复制的仿真程序。
具体实施方式
33.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员
在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.本发明所述一种基于数字孪生平台的仿真调试系统,是通过在数字孪生平台新增机器人离线仿真系统,构建满足所述数字孪生平台主框架要求的虚拟场景,ui面板和脚本代码,将所述机器人离线仿真系统集成到所述数字孪生平台中。
35.其中,所述机器人离线仿真系统至少包括:智能控制模块,中心控制模块,离线调试模块和系统设置模块,具体为:具体的,所述智能控制模块包括:主界面,用于显示生产信息,生产数据,设备状态,质量统计;状态监控界面,用于查看历史报警数据和操作日志;以及全屏显示,用于同时显示数字孪生界面及监控界面。
36.所述中心控制模块包括:整机控制单元,用于整机开启时需要的控制及参数设置;接头上料位单元,用于显示接头上料位的控制及控制状态;杆体上料位单元,用于显示杆体上料位的控制及控制状态;焊机单元,用于显示焊机的控制及控制状态。
37.所述离线调试模块用于设置与所述系统连接的plc的配置参数,所述配置参数包括示教机器人点位配置数据,离线仿真配置数据和点位替换上传数据。
38.和所述系统设置模块,包括:修改密码界面,用于管理用户密码;账号管理,用于增加或删除用户信息;切换用户登录管理界面和程序关闭按钮。
39.进一步的,点击所述离线调试模块,在全屏显示中显示至少包括(如图1所示):右侧区的操作面板,左侧区的仿真信息栏,和呈现在全屏中间区域的虚拟空间,所述虚拟空间为所述虚拟场景中实际车间设备的数字化映射的显示区。
40.其中,所述虚拟场景为从所述数字孪生平台的在线虚实同步模块中加载的全部或者部分设备三维模型;所述虚拟空间为实际车间设备的数字化映射显示。
41.具体的,在右侧区的操作面板中,还包括:机器人名称切换键,点击下拉框进行切换视角操作机器人。
42.关节角度配置区,包括通过输入关节角度示教,点动示教和滚动条示教进行关节示教参数配置;以及通过点动步进调节按钮进行步进大小调整, 如图2所示,可选的,通过关节角度栏进行输入关节角度示教、点动示教、滚动条示教。如在01栏的关节角度输入区进行关节角度值键入,或通过其右侧的滑动条进行角度调整;在02栏进行角度减少或增加点
动的调整;03栏则为拖动滚动条示教的调整。还可以在点动步进栏进行步进的大小调整。
43.如图3所示,拖拽器按钮,通过点击拖拽器按钮生成,在所选操作机器人上生成拖拽器,按住拖拽器按钮的三个轴箭头进行机器人单方向的拖动示教。
44.以及笛卡尔坐标显示区域,用于显示当前操作机器人的笛卡尔坐标信息,及进行笛卡尔坐标上的点动示教。
45.进一步的,在右侧区的操作面板中,还包括:点位操作区,包括:记录点位按钮,重命名点位,删除点位和保存点位;其中,在点位示教完成后,点击所述记录点位按钮进行记录示教好的点位,点击选中表格中记录的任意一个点位,机器人则自动跳转至该点位置,该点位字体会变成绿色,拖动表头边框可调整某列的显示宽度;点击所述重命名点位进行点位重命名;点击删除点位进行点位删除,如果点位被机器人运动指令引用则不可删除;以及在新记录示教点位后需要点击仿真信息界面,则点击保存点位进行保存磁盘操作。
46.在左侧区的所述仿真信息栏,还包括:机器人点位,机器人末端工具和仿真程序;其中机器人点位中的点位信息与操作面板记录的点位保持一致,所述机器人末端工具显示机器人可用的机器人夹具,所述仿真程序显示已有的仿真程序。
47.进一步的,点击所述机器人末端工具,则打开需要切换工具的机器人树节点,点击选中需要显示或卸载的工具节点,右键弹出菜单,选择卸载工具或装载工具。
48.所述仿真信息栏,还包括:产品型号按钮,点击所述产品型号按钮时,则弹出显示产品型号切换对话框,选择需要显示的产品模型确认后场景将显示选择的产品模型;和新建程序按钮,点击所述新建程序按钮选择已有的标准仿真程序作为模板新建仿真程序,或者选择空白选项新建空白仿真程序,其中,选择空白新建的程序不可进行点位上传;如图4所示,点击所述新建程序按钮,弹出新建仿真程序对话框,如选择1m73standard作为模板新建仿真程序,将完成新建的程序按钮保存后,右击对应的仿真程序弹出菜单选项包括仿真运行,重命名和删除选项进行选择(如图5所示);当选择仿真运行时,则弹出仿真播放控制器(如图6所示),选择需要仿真的机器人,点击播放按钮,被选择的机器人则按照设定的仿真程序运动,其中,仿真播放控制器显示时其他界面按钮不可点击,点击“x”按钮退出可恢复。当选择重命名时则进行重命名操作;当点击删除选项时则将当前运行程序删除。
49.以及上传信息按钮,所述仿真程序通过上传信息按钮进行选择对应的程序并上传至系统,如图7所示,上传的点位信息包括编号,点位描述,位置信息,配置信息,及角度信息,并以表格形式呈现,点击确认键则可以进行上传。
50.所述选择空白选项新建空白仿真程序,还包括以下步骤:s1:选择空白选项新建仿真程序。
51.s2:点击选中需要添加指令的机器人,右键弹出添加指令菜单,如图8所示,其中,其中:movej指令为关节运动指令;movel指令为线性运动指令;pause指令为暂停指令;config指令为配置点位指令,该指令不影响仿真运动;settoollink指令为设置工具指令;toolaction指令为工具运动指令。其中,movel指令需保证起点与终点的姿态一致(欧拉角一致),否则可能导致程序崩溃。
52.s3:添加settoollink指令设置仿真工具,然后按运动轨迹添加运动指令和工具动作,确认相应的起点,终点和仿真速度;其中,settoollink指令为设置工具指令;例如:需要
fanuc机器人从a点关节运动到b点,可添加movej指令,如图9所示。
53.s4:点击保存按钮,存储当前新增程序;并点击右键程序进行仿真运行播放,查看效果;如果需要调整指令,可点击选中当前指令右键弹出修改菜单(如图10所示),选择
ꢀ“
修改属性”选项弹出修改对话框,进行属性修改;选择“删除指令”选项可删除指令。
54.进一步出,所述新建空白仿真程序与点位替换操作,包括以下步骤:ss1:记录需要替换的新点位;ss2:选择标准仿真程序作为模板新建仿真程序;ss3:展开新建的仿真程序,如图11所示,其中,采用黄色标志可修改起点终点的指令,点击选中任一个黄色指令右键弹出修改指令属性菜单,点击修改属性选项,将终点替换成新记录的点位;ss4:点击保存按钮保存当前设置,并通过中心控制模块内选择新增的可上传仿真程序进行点位上传。
55.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。