一种裸眼3d室内外全自动扫地消杀一体机器人
技术领域
1.本发明涉及机器人研发技术领域,具体为一种裸眼3d室内外全自动扫地消杀一体机器人。
背景技术:
2.随着我国经济的飞速发展,我国科技水平也在不断进步,而机器人的研发也是在不断的进步,在机器人的领域中机器人的种类也是多种多样的,而在这些机器人中使用最为频繁的就是扫地消杀一体机器人。
3.现有的裸眼3d室内外全自动扫地消杀一体机器人在使用时常常由于外部环境对内部设备影响过大而导致机器人无法正常使用的问题,对此我们提出一种裸眼3d室内外全自动扫地消杀一体机器人。
技术实现要素:
4.本发明的目的在于提供一种裸眼3d室内外全自动扫地消杀一体机器人,以解决上述背景技术中提出现有的裸眼3d室内外全自动扫地消杀一体机器人在使用时常常由于外部环境对内部设备影响过大而导致机器人无法正常使用的问题。
5.为实现上述目的,本发明提供如下技术方案:一种裸眼3d室内外全自动扫地消杀一体机器人,包括机器人主体,所述机器人主体的下端设置有流通气槽,且流通气槽设置有若干个,所述流通气槽内部的上方设置有吸附尘块,所述流通气槽的下方设置有防潮条,且防潮条与机器人主体通过防潮条固定块固定连接,所述防潮条固定块内部的上端设置有内垫块,所述防潮条固定块内部的一侧设置有滚球固定块,且滚球固定块与防潮条固定块通过卡槽焊接连接,所述滚球固定块的一侧设置有滑动滚球,且滑动滚球与滚球固定块通过卡槽转动连接,所述滑动滚球设置有若干个。
6.优选的,所述机器人主体一端的两侧均设置有清理机构,且清理机构与机器人主体通过卡槽固定连接,所述机器人主体一端的上侧设置有摄像头模块,且摄像头模块与机器人主体通过卡槽焊接连接,所述机器人主体两端的下方设置有滚轮固定块,且滚轮固定块与机器人主体焊接连接。
7.优选的,所述滚轮固定块的内部设置有滑动滚轮,且滑动滚轮与滚轮固定块通过卡槽转动连接,所述机器人主体的上端设置有上防护块,所述上防护块的上方设置有激光雷达驱动器,且激光雷达驱动器与上防护块焊接连接,所述机器人主体一侧的上端设置有控制器。
8.优选的,所述机器人主体的两侧均设置有弧形玻璃罩,且弧形玻璃罩与机器人主体通过卡槽粘贴连接,所述弧形玻璃罩的一侧设置有三维裸眼广告机,且三维裸眼广告机与机器人主体通过广告机固定块固定连接,所述机器人主体内部的下端设置有降温风扇。
9.优选的,所述降温风扇的上方设置有放置板块,所述放置板块下方的四个拐角处均设置有支撑柱体,且支撑柱体与放置板块焊接连接,所述放置板块下方的一端设置有测
温传感器,且测温传感器与降温风扇通过电性连接,所述放置板块的一端设置有通气孔,且通气孔设置有若干个。
10.优选的,所述放置板块上方的中间位置处设置有电气柜,且电气柜与放置板块通过卡块固定连接,所述电气柜的两侧分别设置有路由器和锂电池,所述电气柜内部的上方设置有rtc厘米级定位模块,所述rtc厘米级定位模块的下方设置有机器人工业控制模块,且机器人工业控制模块和rtc厘米级定位模块与电气柜均通过板块固定连接。
11.优选的,所述机器人主体内部的上方设置有活动方块,且活动方块与机器人主体通过连接合页块固定连接,所述活动方块的内部设置有静电吸附块,且静电吸附块与活动方块通过卡槽固定连接,所述静电吸附块的外部设置有防脱落凸块,且防脱落凸块与静电吸附块粘贴连接,所述防脱落凸块设置有若干个,所述活动方块上方的两侧均设置有抗压上块,且抗压上块与活动方块粘贴连接,所述活动方块的一侧设置有限位内方块。
12.优选的,所述控制器的下方设置有搬动把手,且搬动把手与机器人主体焊接连接,所述搬动把手的下方设置有检修盖,且检修盖与机器人主体通过卡槽连接。
13.与现有技术相比,本发明的有益效果是:
14.1.该种裸眼3d室内外全自动扫地消杀一体机器人与现有的机器人研发相比,配备了吸附尘块和防潮条,吸附尘块的设计可以有效降低灰尘进入到机器人主体的内部,防潮条的设计可以有效降低潮气进入到机器人主体的内部,解决了现有的裸眼3d室内外全自动扫地消杀一体机器人在使用时常常由于外部环境对内部设备影响过大而导致机器人无法正常使用的问题。
15.2.该种裸眼3d室内外全自动扫地消杀一体机器人与现有的机器人研发相比,配备了测温传感器和降温风扇,测温传感器的设计可以让降温风扇的动作更加灵敏,降温风扇的设计可以有效提高内部设备的降温速率,解决了现有的裸眼3d室内外全自动扫地消杀一体机器人在使用时常常由于内部设备降温不够及时而导致设备烧毁无法正常使用的问题。
附图说明
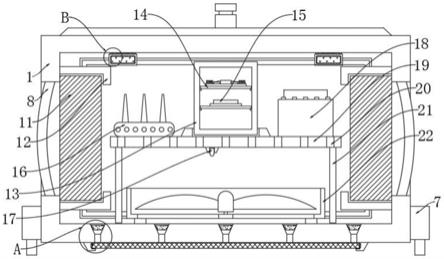
16.图1为本发明的整体结构立体图;
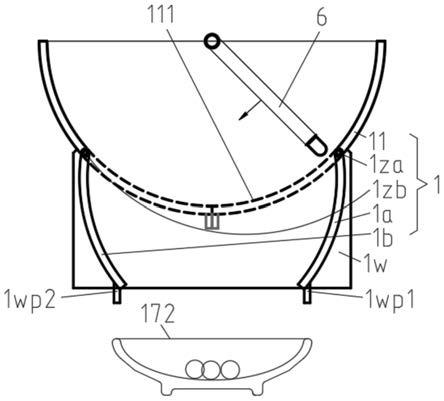
17.图2为本发明的整体结构剖视图;
18.图3为本发明图2的a区局部放大图
19.图4为本发明图2的b区局部放大图
20.图5为本发明的整体结构后视图。
21.图中:1、机器人主体;2、清理机构;3、摄像头模块;4、上防护块;5、激光雷达驱动器;6、控制器;7、滚轮固定块;8、弧形玻璃罩;9、滑动滚轮;10、滑动滚球;11、三维裸眼广告机;12、广告机固定块;13、电气柜;14、rtc厘米级定位模块;15、机器人工业控制模块;16、路由器;17、测温传感器;18、锂电池;19、放置板块;20、通气孔;21、支撑柱体;22、降温风扇;23、流通气槽;24、吸附尘块;25、防潮条;26、内垫块;27、防潮条固定块;28、滚球固定块;29、连接合页块;30、活动方块;31、抗压上块;32、限位内方块;33、搬动把手;34、静电吸附块;35、防脱落凸块;36、检修盖。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.请参阅图1
‑
5,本发明提供的一种实施例:一种裸眼3d室内外全自动扫地消杀一体机器人,包括机器人主体1,机器人主体1的下端设置有流通气槽23,且流通气槽23设置有若干个,流通气槽23内部的上方设置有吸附尘块24,流通气槽23的下方设置有防潮条25,且防潮条25与机器人主体1通过防潮条固定块27固定连接,让防潮条25与机器人主体1的连接更加牢固,防潮条固定块27内部的上端设置有内垫块26,防潮条固定块27内部的一侧设置有滚球固定块28,且滚球固定块28与防潮条固定块27通过卡槽焊接连接,让滚球固定块28与防潮条固定块27的连接更加牢固,滚球固定块28的一侧设置有滑动滚球10,且滑动滚球10与滚球固定块28通过卡槽转动连接,让滑动滚球10与滚球固定块28的连接更加牢固,滑动滚球10设置有若干个,滑动滚球10的设计可以让防潮条25在进行移动时更加方便。
24.进一步,机器人主体1一端的两侧均设置有清理机构2,且清理机构2与机器人主体1通过卡槽固定连接,让清理机构2与机器人主体1的连接更加牢固,机器人主体1一端的上侧设置有摄像头模块3,且摄像头模块3与机器人主体1通过卡槽焊接连接,机器人主体1两端的下方设置有滚轮固定块7,且滚轮固定块7与机器人主体1焊接连接,让滚轮固定块7与机器人主体1的连接更加牢固。
25.进一步,滚轮固定块7的内部设置有滑动滚轮9,且滑动滚轮9与滚轮固定块7通过卡槽转动连接,让滑动滚轮9与滚轮固定块7的连接更加牢固,机器人主体1的上端设置有上防护块4,上防护块4的上方设置有激光雷达驱动器5,且激光雷达驱动器5与上防护块4焊接连接,让激光雷达驱动器5与上防护块4的连接更加牢固,机器人主体1一侧的上端设置有控制器6。
26.进一步,机器人主体1的两侧均设置有弧形玻璃罩8,且弧形玻璃罩8与机器人主体1通过卡槽粘贴连接,让弧形玻璃罩8与机器人主体1的连接更加牢固,弧形玻璃罩8的一侧设置有三维裸眼广告机11,且三维裸眼广告机11与机器人主体1通过广告机固定块12固定连接,让三维裸眼广告机11与机器人主体1的连接更加牢固,机器人主体1内部的下端设置有降温风扇22。
27.进一步,降温风扇22的上方设置有放置板块19,放置板块19下方的四个拐角处均设置有支撑柱体21,且支撑柱体21与放置板块19焊接连接,让支撑柱体21与放置板块19的连接更加牢固,放置板块19下方的一端设置有测温传感器17,且测温传感器17与降温风扇22通过电性连接,放置板块19的一端设置有通气孔20,且通气孔20设置有若干个。
28.进一步,放置板块19上方的中间位置处设置有电气柜13,且电气柜13与放置板块19通过卡块固定连接,让电气柜13与放置板块19的连接更加牢固,电气柜13的两侧分别设置有路由器16和锂电池18,电气柜13内部的上方设置有rtc厘米级定位模块14,rtc厘米级定位模块14的下方设置有机器人工业控制模块15,且机器人工业控制模块15和rtc厘米级定位模块14与电气柜13均通过板块固定连接,让机器人工业控制模块15和rtc厘米级定位模块14与电气柜13的连接更加牢固。
29.进一步,机器人主体1内部的上方设置有活动方块30,且活动方块30与机器人主体1通过连接合页块29固定连接,让活动方块30与机器人主体1的连接更加牢固,活动方块30
的设计让静电吸附块34在对机器人主体1内部静电进行吸收时更加方便,活动方块30的内部设置有静电吸附块34,且静电吸附块34与活动方块30通过卡槽固定连接,让静电吸附块34与活动方块30的连接更加牢固,静电吸附块34的外部设置有防脱落凸块35,且防脱落凸块35与静电吸附块34粘贴连接,让防脱落凸块35与静电吸附块34的连接更加牢固,静电吸附块34的设计可以有效增加对静电的吸收,防脱落凸块35设置有若干个,而静电吸附块34外部防脱落凸块35的设计可以有效防止静电吸附块34的脱落,活动方块30上方的两侧均设置有抗压上块31,且抗压上块31与活动方块30粘贴连接,让抗压上块31与活动方块30的连接更加牢固,活动方块30的一侧设置有限位内方块32。
30.进一步,控制器6的下方设置有搬动把手33,且搬动把手33与机器人主体1焊接连接,让搬动把手33与机器人主体1的连接更加牢固,搬动把手33的下方设置有检修盖36,且检修盖36与机器人主体1通过卡槽连接,让检修盖36与机器人主体1的连接更加牢固,检修盖36的设计让工作人员在移动该种裸眼3d室内外全自动扫地消杀一体机器人时更加方便。
31.工作原理:使用时先将该种裸眼3d室内外全自动扫地消杀一体机器人移动到需要使用的位置处,在该种裸眼3d室内外全自动扫地消杀一体机器人使用时,此时机器人主体1下方的防潮条25可以有效防止潮气进入到机器人主体1的内部,而流通气槽23内部的吸附尘块24可以将进入到机器人主体1的内部,这样可以大大降低外部环境对机器人主体1的影响,大大增加了该种裸眼3d室内外全自动扫地消杀一体机器人的使用寿命,而在该种裸眼3d室内外全自动扫地消杀一体机器人使用时,此时测温传感器17就可以对机器人主体1内部温度进行感知,当温度过高时,此时测温传感器17感知到并将信号传输给降温风扇22,这样可以及时对内部设备进行降温。
32.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。