一种混凝土3d打印的路径优化方法
技术领域
1.本发明属于混凝土3d打印技术领域,特别涉及一种混凝土3d 打印的路径优化方法。
背景技术:
2.目前的混凝土3d打印技术仍然存在着诸多缺陷。传统的路径规划方法通常按照某种事先规划好的规则路径进行打印,对于复杂的 3d打印构件打印过程中由于打印头频繁的跳转,产生了过多的打印断点,进而导致3d打印构件的成型质量差。并且由于传统路径规划下的3d打印机会出现喷头频繁抬头的情况,严重加长了3d打印的成型时间。
技术实现要素:
3.为了克服上述现有技术的不足,本发明的目的在于提供一种混凝土3d打印的路径优化方法,该方法首先将3d打印构件切片模型建立为几何模型,并且初始化几何模型中各个点位置信息,其次利用图论中相关知识将几何模型分为多个可以一次性遍历完的区域,然后利用蚁群算法多次迭代找出可以打印完几何模型的最短路径,最后将所规划好的打印路径转化为g代码在3d打印机上完成打印,实现3d打印的路径优化。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种混凝土3d打印的路径优化方法,包括以下步骤;
6.步骤1):将混凝土打印构件模型切片;
7.步骤2):混凝土打印构件切片模型转化为几何模型;
8.步骤3):初始化几何模型中几何点的位置信息,并依据图论原理将几何模型划分为可一次性打印完的多个区域;
9.步骤4):利用蚁群算法找出最短打印几何模型路径。
10.所述步骤1)的打印件模型切片过程中,采集混凝土3d打印构件模型数据,然后依据所采集的数据建立打印模型,最后使用cura软件将所建立模型切片。
11.所述步骤2)的模型转化步骤:
12.(1)提取几何模型中只需打印的区域,其余信息进行删除操作;
13.(2)对几何模型的几何点进行标记,先标记各个几何顶点,然后对几何模型中各个打印路径所相交的点也进行标记;
14.(3)将标记的几何点按照打印路径宽度等比例连接起来;
15.(4)转化完成后将几何模型进行等比例缩放。
16.所述步骤3)首先将打印模型的切片构建为计算机可以识别的几何图形,其次将几何图形的各个几何点提取出来并且编号为s1、 s2、s3……
s
n
,将每个点坐标分别记为(x1,y1)、(x2,y2)、(x3, y3)
……
(x
n
,y
n
),并且设置矩阵t来描述各个点之间的连接情况,矩阵中的元素记为权值,然后按照以下规则先后将各个点存放进分区矩阵t1中,t、t1如下式;
17.y
i
=y
j
且x
i
<x
j
且t
ij
≠0且t
ij
≠inf;
18.x
i
=x
j
且y
i
<y
j
且t
ij
≠0且t
ij
≠inf;
19.y
i
=y
j
且x
i
>x
j
且t
ij
≠0且t
ij
≠inf;
20.x
i
=x
j
且y
i
>y
j
且t
ij
≠0且t
ij
≠inf;
[0021][0022]
设置一个矩阵b,第一行为所标记的几何点s
i
,第二行b
2i
为每个几何点与其它点连接的次数初始值设置为0,在t1矩阵的第一行中选择一个起始点s
i
连接其下一行中的点s
j
,并且将矩阵t中元素t
ij
置为 inf,将矩阵b中的元素b
2i
加1,后在t1矩阵中找到s
j
列,判断矩阵 t和矩阵b的元素重复进行以上操作,找到可以一次遍历完的分区, b矩阵如上式。
[0023]
所述连接规则具体为:
[0024]
连接s
i
、s
j
,使t
ij
=inf、b
2i
=b
2i
1;
[0025]
找到s
j
、s
j1
,如果t
ij
≠inf且b
2j
<b
2j1
,连接s
j
、s
j1
;
[0026]
当重新连接到s
i
时,标志着一个分区已经寻找完毕,此时以s
i
为圆心,以r为半径寻找未曾连接的点重复以上操作找到新的分区,并且筛选出连接路径最长的分区,重复以上操作直至遍历完整个图形。
[0027]
所述步骤4)的步骤为:
[0028]
(1)初始化各项参数,如蚂蚁的数量μ、信息素重要程度因子α、信息素挥发因子β、最大迭代次数itermax;
[0029]
(2)构建解空间,将各个蚂蚁随机地置于不同的出发点,计算每个蚂蚁k(k=1,2,3
…
n)下一个待访问的打印点,直到所有蚂蚁访问完所有打印点;
[0030]
(3)更新信息素,计算每个蚂蚁经过路径长度d
k
(k=1,2,
…
,n),记录当前迭代次数中的最优解(最短路径),同时,对各个打印点连接路径上信息素浓度进行更新;
[0031]
(4)判断是否终止,若iter<itermax,则令iter=iter 1,清空蚂蚁经过路径的记录表,并返回步骤2;否则,终止计算,输出最优解。
[0032]
本发明的有益效果:
[0033]
本发明针对打印件中多封闭轮廓件在3d打印路径扫描过程中产生空行程的问题,提出了一种混凝土3d打印的路径优化设计方法,合理规划各轮廓的扫描顺序及扫描起始点,减少了3d打印扫描过程中轮廓路径的拐点,缩短了轮廓路径的空行程,从而提高成型的速度和质量。
附图说明
[0034]
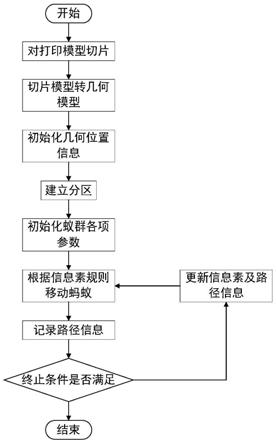
图1为混凝土3d打印的路径优化设计方法流程图。
[0035]
图2为混凝土3d打印构件切片几何图。
[0036]
图3为混凝土3d打印分区规则图。
[0037]
图4为混凝土3d打印的路径优化设计方法仿真结果图。
具体实施方式
[0038]
下面结合实施例对本发明作进一步详细说明。
[0039]
参照图1,对本发明的具体步骤进行详细描述。
[0040]
步骤一:将打印件模型切片。
[0041]
所述步骤一:本方法采集过程中首先使用测量工具读出打印构件的几何数据(长、宽、高等),然后依据所采集的数据建立打印模型,最后使用cura软件将所建立模型切片。
[0042]
步骤二:切片模型转化为几何模型。
[0043]
所述步骤二:(1)将切片模型中不需要打印部分的信息删除;(2) 将切片模型中的各个几何点提取出来;(3)将所采集到的切片模型几何数据进行等比例缩小,使得所建立的几何模型方便处理。如图2。
[0044]
步骤三:初始化几何模型中几何点的位置信息,并依据图论原理将其划分为可一次性打印完的多个区域。
[0045]
所述步骤三:在分区算法中首先将打印模型的切片构建为计算机可以识别的几何图形,其次将几何图形的各个几何点提取出来并且编号为s1、s2、s3……
s
n
,将每个点坐标分别记为(x1,y1)、 (x2,y2)、(x3,y3)
……
(x
n
,y
n
)。并且设置矩阵t来描述各个点之间的连接情况,矩阵中的元素记为权值。然后按照以下规则先后将各个点存放进分区矩阵t1中。t、t1如下式。
[0046]
(1)y
i
=y
j
且x
i
<x
j
且t
ij
≠0且t
ij
≠inf;
[0047]
(2)x
i
=x
j
且y
i
<y
j
且t
ij
≠0且t
ij
≠inf;
[0048]
(3)y
i
=y
j
且x
i
>x
j
且t
ij
≠0且t
ij
≠inf;
[0049]
(4)x
i
=x
j
且y
i
>y
j
且t
ij
≠0且t
ij
≠inf;
[0050][0051]
设置一个矩阵b,第一行为所标记的几何点s
i
,第二行b
2i
为每个几何点与其它点连接的次数初始值设置为0。在t1矩阵的第一行中选择一个起始点s
i
连接其下一行中的点s
j
,并且将矩阵t中元素t
ij
置为 inf,将矩阵b中的元素b
2i
加1。后在t1矩阵中找到s
j
列,判断矩阵 t和矩阵b的元素重复进行以上操作,找到可以一次遍历完的分区。 b矩阵如上式。如图3。以下为连接规则:
[0052]
(1)连接s
i
、s
j
,使t
ij
=inf、b
2i
=b
2i
1;
[0053]
(2)找到s
j
、s
j1
,如果t
ij
≠inf且b
2j
<b
2j1
,连接s
j
、s
j1
;
[0054]
当重新连接到s
i
时,标志着一个分区已经寻找完毕,此时以s
i
为圆心,以r为半径寻找未曾连接的点重复以上操作找到新的分区,并且筛选出连接路径最长的分区,重复以上操作直至遍历完整个图形。
[0055]
所述步骤三的分区步骤:
[0056]
(1)初始化几何模型中几何点的过程中,按照几何模型比例赋予每个几何点(x,y)坐标值,即可求出各个点之间的欧氏距离。所用到的求出欧式距离公式如下。
[0057][0058]
(2)初始化位置信息完成后,继续赋予不同几何点之间的权值,权值的大小取决于各个点之间的打印路径长短。当两个点之间没有打印路径时,权值取inf。
[0059]
(3)依据图论的原理首先从初始点出发,依据规则开始寻找分区路径,当重新找到初始点时,一个分区寻找完毕。此时根据初始点的位置找到距离其最近的且并未被寻找的几何点,重新根据规则寻找路径。如此重复,直到整个几何模型被遍历完成。
[0060]
步骤四:利用蚁群算法找出最短打印最短路径。
[0061]
所述步骤四:(1)初始化各项参数,如蚂蚁的数量μ、信息素重要程度因子α、信息素挥发因子β、最大迭代次数itermax等;
[0062]
(2)构建解空间,将各个蚂蚁随机地置于不同的出发点,计算每个蚂蚁k(k=1,2,3
…
n)下一个待访问的打印点,直到所有蚂蚁访问完所有打印点;
[0063]
(3)更新信息素,计算每个蚂蚁经过路径长度d
k
(k=1,2,
…
, n),记录当前迭代次数中的最优解(最短路径)。同时,对各个打印点连接路径上信息素浓度进行更新;
[0064]
(4)判断是否终止,若iter<itermax,则令iter=iter 1,清空蚂蚁经过路径的记录表,并返回步骤2;否则,终止计算,输出最优解。最终的仿真结果如图4。
[0065]
所述步骤四的步骤为:
[0066]
(1)根据所建立的分区分别将几何模型中的几何点分类;
[0067]
(2)每次从每个分类中提取一个点依据蚁群算法找出最短路径,其中(x1,y1)、(x2,y2)、(x3,y3)
……
(x
n
,y
n
)分别代表各个点的坐标,运用如下公式得到各个点之间的相对距离d
ij
,相加各个d
ij
得到各个点的距离之和记为d
k
。每次连接打印点是留下信息素τ
k
,τ
k
的值随着打印距离的边长而递减,并且随着时间增长,τ
k
也随着变小。τ
k
的计算公式如下。然后根据如下公式利用d
k
、τ
k
计算打印下一个点的概率p
k
,由式中可以看出两个点的距离越小下次被打印的概率也越大,随着时间的推进所遗留的信息素值越大。最终在算法正反馈的作用下,打印路径会集中到最佳路径。
[0068][0069][0070]
[0071][0072]
本发明所采用的算法在windows 10的操作平台下,使用 matlab r2018a开发工具进行试验,具体软硬件环境如下所示:
[0073]
表1.软件硬件环境参数表
[0074][0075]
本发明首先依据几何理论将3d打印件的二维切片模型进行分区,减少了打印机喷头的转弯次数,提高了3d打印件的成型质量。其次将二维切片模型的各个分区中的几何点提取出来,利用蚁群算法对这些几何点进行路径规划,找出可以遍历完所有分区的最短路径。降低了3d打印机喷头的抬头次数,减少了3d打印过程中的空行程,缩短了3d打印成型时间。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。