技术特征:
1.一种借助自主移动的机器人(100)来处理待处理的区域(g)的表面的方法,所述方法包括:根据一个或多个处理图案处理所述表面;存储所述区域的已处理完毕的表面部分;其中,存储所述已处理完毕的表面部分在栅格地图中完成。2.根据权利要求1所述的方法,其中,已被处理的每个表面部分,在所述栅格地图中被标记为已处理。3.根据权利要求2所述的方法,其中,根据在所述区域中的定位的不准确性的量度,将所述已被处理的每个表面部分,在所述栅格地图中被标记为已处理。4.根据权利要求3或4所述的方法,其中,针对已清理过的每个表面部分,在所述栅格地图中存储不准确性值,所述不准确性值指示机器人定位的不准确性。5.根据权利要求1
‑
4中任一项所述的方法,其中,所述栅格地图包括多个正方形,并且其中,针对每个正方形进行存储所述正方形是否已经被清理的信息。6.根据权利要求2所述的方法,其中,这种正方形的边缘长度等于或小于清理模块的尺寸。7.一种借助自主移动的机器人(100)来处理待处理的区域(g)的表面的方法,所述方法包括:根据处理图案处理所述表面;其中,通过存储机器人的轨迹,来存储已处理完毕的区域。8.根据权利要求7所述的方法,其中,基于所存储的轨迹,计算出所述区域中的哪些表面部分已经被处理完毕或哪些区域还没有被处理。9.根据权利要求7至8中任一项所述的方法,其中,存储所述轨迹以及定位的不准确性,和/或机器人轨迹节段的重叠。10.根据权利要求7至9中任一项所述的方法,其中,基于所存储的轨迹以及定位的不确定性,计算所述区域的表面部分哪些已经被处理完毕或还未被处理。11.根据权利要求7至10中任一项所述的方法,其中,基于所存储的轨迹以及机器人轨迹节段的重叠,计算出所述区域中的哪些表面部分已经被处理完毕或哪些区域还没有被处理。12.一种连接至内部和/或外部数据处理系统的自主机器人,所述数据处理系统被适配成执行软件程序,当所述软件程序被所述数据处理系统执行时,致使所述机器人执行根据权利要求1至11中任一项所述的方法。
技术总结
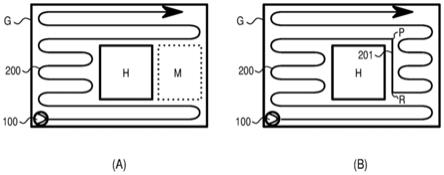
本发明涉及一种借助自主移动的机器人处理待处理的区域的表面的方法。根据这里讨论的实施例,该方法包括以下步骤:控制机器人以根据第一种处理图案处理该区域;监控机器人周围环境中的区域,其中该区域具有相对于所述机器人的固定的位置;并且当在所述被监控的区域中检测到可到达的和未经处理的区域时,控制所述机器人根据第二种处理图案处理该区域。机器人根据第二种处理图案处理该区域。机器人根据第二种处理图案处理该区域。
技术研发人员:H
受保护的技术使用者:罗博艾特有限责任公司
技术研发日:2016.11.15
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。