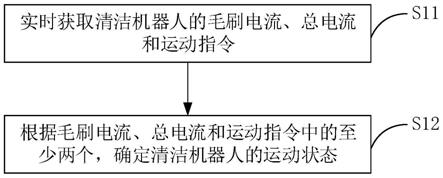
借助机器人的机器人辅助表面处理
1.分案申请
2.本技术是申请日为2016年11月15日,申请号为201680078988.0,标题为“借助机器人的机器人辅助表面处理”的发明申请的分案申请。
技术领域
3.本发明涉及一种机器人,用于表面处理,例如用于清理地面(真空吸尘器机器人)、用于割草、用于涂抹表面等。此外,本发明涉及一种由机器人执行的方法,该方法用于通过机器人有效地实施的相应的任务。
背景技术:
4.近年来,自主移动的机器人正被越来越多地用于例如清理地面或修剪草坪。在这两种情况下,取决于利用安装在机器人上的例如刷头的表面处理设备来完整地处理特定的表面。通过例如随机地在待清理的表面上移动,简单的设备在不创建和使用机器人部署区域的地图的情况下就足够使用。更复杂的机器人使用机器人部署区域的地图,所述机器人自己创建所述地图或获得呈电子形式的地图以供使用。这些系统实现记录已处理过的表面。
5.具有地图功能的这些现代的自主移动的机器人在处理(例如,清理)表面时使用尽可能系统化的处理图案。所述处理图案必须匹配于使用区域的复杂条件,例如带家具的公寓。此外,机器人必须能够对意外的情况作出反应,例如在其使用区域内移动的人员或者利用机器人的传感器难以检测到的障碍物。然而,可能会发生在此一些地面区域被遗漏的情况。机器人可能具有检测模块来检测并随后清理这种最后或在运行期间被遗漏的表面。为此,必须重新驶过已经处理过的表面,由此降低处理效率或增加用于整个区域的处理持续时间。
6.一般而言,可以看出本发明的目的在于改进现有的由机器人所执行的方法,所述方法用于表面处理(例如,用于清理地面)的自主移动的机器人,从而由此提升机器人的效率。
技术实现要素:
7.上面提及的目的通过根据权利要求1、13、21、23、31和36之一所述的方法以及通过根据权利要求41所述的机器人来解决。本发明的各种实施方式和改进方案是从属权利要求的主题。
8.在下文中,将描述一种借助自主移动的机器人处理待处理的区域的表面的方法。根据本发明的一个示例,所述表面由机器人沿机器人轨迹的轨迹节段根据第一种处理图案进行处理。将待处理的区域根据机器人的当前的位置分解为根据处理图案应该已经处理过的第一子区域、仍待处理的第二子区域以及当前正在处理的第三子区域。然后机器人可以检查所述第一子区域是否实际上已经被清理完毕。
9.根据另一个实施例,该方法包括根据第一种处理图案沿机器人轨迹的轨迹节段处理所述表面,其中所述轨迹节段具有序列。该方法进一步包括在处理所述轨迹节段的特定的轨迹节段器件检测是否在至少一条轨迹节段中存在尚未处理的区域,所述至少一条轨迹节段在所述序列中位于第一条轨迹节段之前,所述尚未处理的区域在无阻碍地执行所述处理的情况下根据所述序列应该已经被清理完毕。
10.根据另一个实施例,该方法包括:控制机器人根据第一种处理图案处理所述区域;监控所述机器人的周围环境中的区域,其中所述区域相对于机器人具有固定的位置;以及当在被监测的区域中检测到可进入的和未处理的区域时,控制所述机器人根据第二种处理图案来处理所述区域。
11.此外,描述了一种用于控制自主移动的机器人的方法,该机器人具有用于在区域内实施任务的处理模块。根据这里描述的示例之一,该方法包括:沿机器人轨迹处理所述区域的表面;检测机器人的周围环境的特征以在处理期间检测障碍物;以及自动地规划围绕检测到的障碍物的避让路线,其中所述规划被限制于规划区域,所述规划区域与所述机器人一起移动并仅包括所述区域的一部分。
12.根据另一个实施例,该方法包括:沿机器人轨迹处理该区域的表面;检测机器人的周围环境的特征以在处理期间检测障碍物;以及自动地规划围绕检测到的障碍物的避让路线,其中在所述规划过程中考虑处理增益,所述处理增益在所述避让期间和/或之后由于对所述表面的处理而产生。
13.根据另一个实施例,该方法包括:根据第一种处理图案沿机器人轨迹处理该区域的表面;借助机器人上的传感器组件自动地确定所述机器人在该区域中的位置;确定用于所确定的位置的不准确性的量度值;以及根据所确定的用于不准确性的量度值(用于不准确性的量度值当然也是用于准确性的量度值)来匹配所述第一种处理图案。
14.其他实施例涉及一种具有内部的和/或外部的数据处理设备的机器人,所述数据处理设备被配置用于实施软件程序,所述软件程序在由所述数据处理设备实施时使所述机器人实施本文所述的方法。
附图说明
15.接下来将借助附图中示出的示例更详细地解释本发明。附图不一定按比例绘制,并且本发明不限于所示出的方面。相反,重点在于表示基于本发明的原理。附图示出:
16.图1示出了表面处理时自主机器人的导航策略的各种示例;
17.图2示意性地示出了,当由于障碍物而必须匹配机器人的先前计算的轨迹时,“被遗漏的”(未经处理的)区域的问题;
18.图3示例性地示出了由于障碍物而带有和不带有干扰的清理机器人的周围环境中的清理地图(其中标记已清理过的区域的地图);
19.图4示出了匹配用于处理先前由于障碍物而被遗漏的区域的机器人轨迹的各种可能方案;
20.图5示出了用于逐步地匹配用于处理先前由于障碍物而被遗漏的区域的机器人轨迹的另一种可能方案;
21.图6示出了在动态地匹配用于绕过(绕开)障碍物的机器人轨迹的过程中的各种方
案;
22.图7示出了在动态地匹配用于避让(避免)的机器人轨迹的过程中的并搜索用于继续清理的起点的各种方案;
23.图8示出了类似于图7的情况,然而其中的规划区域与机器人不对称,并且在规划所匹配的用于避让或绕过障碍物的机器人轨迹时将所述规划区域考虑在内;
24.图9示出了在选择避让轨迹节段(从左侧或右侧绕过所述障碍物)时的各种策略和决策标准;
25.图10示出了在选择避让轨迹节段(绕过所述障碍物或继续在另一条直线的蜿蜒曲折区段中进行清理)时的各种策略和决策标准;
26.图11示出了根据本文描述的策略的、对具有障碍物的区域进行系统化的处理的示例;以及
27.图12示出了对具有重叠的轨迹节段的区域进行系统化的处理的示例。
具体实施方式
28.接下来将借助涉及用于清理地面的自主机器人(例如,真空吸尘器机器人)的实施例来示例性地解释本发明。然而,本文所描述的实施例也适用于其中应该通过自主移动的工作机器尽可能完整地表面处理的其他领域。除此以外,这种机器人的其他示例还包括用于去除地面层的机器(例如通过研磨)、用于施涂诸如油漆到表面上的机器和用于修剪草坪的机器、用于在耕地上作业的机器以及自主的收割机。
29.移动自主机器人100通常包括驱动模块,该驱动模块例如可以具有电动机、变速器和车轮,由此理论上机器人可以到达地面的任何点。机器人还包括处理模块,诸如用于清理地面的清理模块、诸如刷头或用于吸取污物(或两者)的装置。这种机器人本身是已知的并且由于周围环境中的导航的类型以及由于策略而基本上具有差异,在处理地面时、例如在清理过程中所使用所述策略。
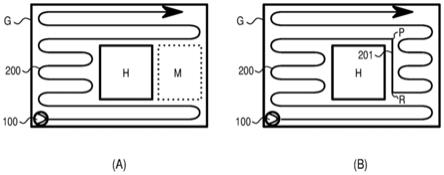
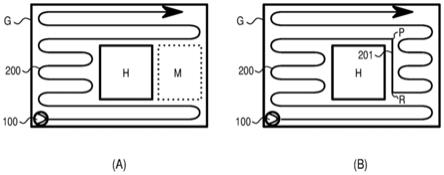
30.图1示出了导航策略的各种示例。在图1a中,机器人100使用随机的导航方法,由此所述机器人在无需创建或使用地图的情况下足够使用(参见例如irobot公司的公开文献ep2287697a2)。通过这种方式,待清理的区域g中的地面部分地被多次清理,而其他的地面可能根本未被清理。
31.为了提高地面处理的效率,已经开发了系统化的清理图案,从而一次性地并且以已处理过的表面的尽可能少的重叠来处理区域g。这些处理图案(处理图案)例如通过将轨迹节段(轨迹节段)相继地排列成机器人处理的机器人轨迹(轨迹)而得到。通过将轨迹节段相继地排列而得到例如螺旋形的(参见图1b)或蜿蜒曲折形的处理图案(参见图1c,也被称为曲折形图案或牛耕式转行图案)。例如,蜿蜒曲折形的处理图案200由多个长形的、直的并且大致平行的轨迹节段组成,所述轨迹节段通过短的连接段(直的和/或弯曲的)进行连接。所述处理图案可以设计成不同的变型方案并相互组合。此外,还可以将所述处理图案与其他策略组合使用、例如用于避让障碍物的或用于清理所述区域g的严重污染的区域的策略。
32.为了确保根据所述处理图案的可靠的遍历并且使所述机器人轨迹匹配于机器人部署区域,机器人100可以确定周围环境的地图并且同时也借助合适的、例如布置在机器人上的传感器以及例如slam方法确定其在该地图中的位置。(slam:同步的定位和地图创建,
德语:simultane lokalisierung und kartener stellung,参见如b.h.durrant
‑
whyte和t.baileyde:“simultaneous localization and mapping(slam):part i the essential algorithms”,ieee机器人与自动化杂志,第13卷,第2期,第99
‑
110页,2006年6月)。这由此实现了可以有目的地驶向和清理预先给定的区域g中的每个(可到达的)点。在理想情况下,在此刚好驶向每个点一次,从而避免重新清理已清理过的区域,这由此显著地减少了用于清理所述区域g所需的时间。合适的传感器例如是用于测量到周围环境中的物体的距离的传感器,例如借助光学的三角测量或发出的信号的传播时间测量来工作的光学的和/或声学的传感器(三角测量传感器、飞行时间相机、激光扫描仪、超声波传感器)。合适的传感器的其他典型示例包括相机、触觉传感器、加速度传感器、转速传感器和里程表。
33.为了确保所述区域g的每个点都已被清理,所述机器人可以将已处理过的表面存储在清理地图(其中标记了已清理过的区域的地图)中。为此,例如可以使用栅格地图,所述区域g在所述栅格地图中被划分为多个正方形的子表面并且针对每个正方形进行存储所述正方形是否已经被清理的信息。这种正方形的边缘长度例如可以对应于所述清理模块的尺寸或者更小。替代性地,机器人例如可以存储其轨迹(机器人轨迹的路线)并由此计算出所述区域g的哪些区域已经被处理完毕以及哪些区域仍然需要被处理。
34.预先给定的待处理的区域g可以由诸如墙壁的真实的障碍物(例如,公寓或公寓的封闭的空间)来进行限制。在更高级的设备中,区域g可以额外地由虚拟的边界来限定。例如,虚拟的边界可以由用户或机器人在机器人部署区域的地图中进行定义(例如,呈边界线的形式)。机器人例如可以将整个区域划分成相继地被处理的多个子区域(例如,公寓的多个空间或空间的多个区域)。
35.通常,机器人100可以借助传感器检测其周围环境的特征并且基于所检测到的特征检测障碍物。由传感器所检测到的特征也可以实现所述机器人在电子地图中的定位。尽管采用了基于地图的导航,由于有错误的传感器和地图数据而几乎不能实现对区域g的清理的可靠的预先规划。对此的原因在于:仅借助布置在机器人上的传感器难以检测的障碍物或者诸如人员或家庭宠物等的可能会在短期内阻挡机器人的路径的动态的障碍物。因此仅在非常有限的范围内实现(空间上的和/或时间上)的远距离的预先规划,并且因此有必要将由所述机器人使用的处理图案动态地匹配于未预见的(例如,由于不可预见的)情况。下面将描述用于机器人的不同方案,从而根据需要(例如,当检测到未预见的障碍物时)动态地匹配预先给定的处理图案。这使得机器人能够对动态变化的周围环境(例如,由于移动的障碍物)作出尽可能“智能”的响应。
36.图2a根据现有技术示例性地示出了自主移动的机器人100,该自主移动的机器人借助蜿蜒曲折形的轨迹200从“从下到上”(在根据图2a的地图上)系统地清理区域g。由于障碍物h,在所述区域g的一部分中不能清理整个宽度,因此遗漏了子区域m。为了避免碰撞,机器人在障碍物前方转身并且沿所述蜿蜒曲折轨迹200的下一个直的(在地图上位于其上的)子块继续进行所述处理。因此缩短了所述蜿蜒曲折轨迹200的由所述障碍物h所阻挡的子块(与没有障碍物h的情况相比)。当机器人100使用其中存储有所述待处理的区域g的已清理过的区域的清理地图时,所述机器人100因此可以在完成所述清理后检测(也就是说,将所述区域g的未处理的区域作为这种区域来进行识别)被所述遗漏的区域m(参见图2a中的虚线)并且有目标地驶向所述区域并对其进行处理。然而,所述机器人在此必须再次驶过已清
理过的区域,由此使得整个处理过程的效率(例如,所述区域g的每个表面单位的处理时间)下降。
37.图2b示例性地示出了根据本文所描述的方案如何改进对所述区域g的系统化的处理。自主移动的机器人100借助蜿蜒曲折形的轨迹200“从下到上”系统地清理所述区域g。此外,所述机器人100定期地(例如,利用其中记录有已清理过的表面的清理地图)检查被遗漏的区域m是否存在于所述机器人的“下方”并且是否可以直接驶过该区域。在点p处,所述机器人100检测这样的区域m并且相应地调整所述处理图案以对该区域进行清理。因此,区域m被称为“被遗漏的”,因为在所述机器人达到点p的时刻,如果没有所述障碍物h,所述区域应该已经被清理过。因此,障碍物的存在已经导致所述区域m被遗漏。接下来,将解释通过机器人自主地检测被遗漏的区域的各种方案。
38.在此应该注意的是,“从下到上”或“从上到下”和“在机器人位置之上”或“在机器人位置之下”的描述不是限制性的,而是仅涉及机器人的周围环境的地图的图示的示例。实际上,在每次系统化的清理的过程中都可以借助蜿蜒曲折形的轨迹如此选择坐标系,使得在该坐标系中的机器人“向下”开始并且“向上”终止对所述区域g的处理。
39.为了在所述清理期间检测被遗漏的区域m(参见图2a),机器人例如可以连续地检查记录在清理地图中的其直接的周围环境的处理状态(清理状态)。图3a示例性地示出了在系统化的清理过程中借助蜿蜒曲折形的轨迹200的在所述机器人100的周围环境中的已被清理过的表面,所述蜿蜒曲折形的轨迹由多个互相连接的、直线的子轨迹组成。所述表面被划分为当前正被处理的轨迹区段t(处理状态t,轨迹,轨迹)、尚未清理的区域u(处理状态u,未清理,未清理)和先前已清理过的区域c(处理状态c,已清理,已清理)。在(无干扰的)系统化的清理中(例如沿蜿蜒曲折轨迹),所述机器人100的周围环境的这种划分总是可能的且可容易确定的。此外,所述机器人100可以在所述区域g中的每个位置上(也就是说,当所述机器人到达特定点的时刻)确定所述区域g的哪个区域在无干扰的处理过程中应该已被清理过(也就是说,具有所述处理状态c)。借助将该目标状态(参见图3a)与由所述清理地图可见的实际状态(参见图3b)进行比较,可以确定被遗漏的区域m。对此,该示例在图3b中示出。
40.图3b示出了沿蜿蜒曲折形的轨迹200进行系统化的清理期间在机器人100的周围环境中的已清理过的表面。在此,由于障碍物h,待清理的区域g没有被完整处理(参见图2a),由此产生了被遗漏的子区域m。通过将该清理结果(实际状态)与来自图3a的所规划的或所期望的结果(目标状态)进行比较,所述机器人100可以检测所述被遗漏的表面块并立即对其进行清理。一旦检测到被遗漏的子区域m(到达位置p),当其在所述机器人的被监控的周围环境内的尺寸(表面、长度或宽度,或这些特征参量的组合)超过预先定义的边界值时,所述机器人100可以决定清理被遗漏的子区域。此外,当可以从所述机器人100的位置直接(不需要绕过障碍物)达到被遗漏的表面块时,所述机器人100于是仅决定清理所述被遗漏的表面块。在图3b的示例中,当该机器人经过所述障碍物h(即,在到达所述位置p之后)并且不出现新的干扰性的障碍物时,所述机器人100尤其于是才会决定清理所述被遗漏的表面块m。
41.如图3所示,所述被监控的周围环境可限于围绕所述机器人100对称布置的圆形的区域s(参见图3a和3b)。在所述机器人前方的行驶方向上的矩形的区域(参见图3c)也是可能的。替代性地,所述周围环境也可以限于根据期待应该已经被清理过的区域。例如,所述
被监控的周围环境因此可以限于被蜿蜒曲折轨迹200的最后的直线的轨迹区段(或被最后两个直线的并且平行的轨迹区段)所覆盖的区域。所述被监控的周围环境例如可以位于当前正被处理的轨迹区段t附近(正被处理的轨迹t)并向前延伸两个机器人直径。在此,所考虑的周围环境将根据驶过的清理图案而改变。因此,在图3的示例中,仅机器人100的右侧(沿行驶方向)的区域是相关的。所述机器人100将沿相反方向驶过下一个(或前一个)平行的轨迹区段,由此所述机器人100的左侧(沿行驶方向)的区域是相关的。此外,所考虑的周围环境可以匹配于所使用的清理地图的特性。当所述清理地图例如为栅格地图时,所观察的区域s例如为矩形(参见图3c)并且包含预先给定数量的子表面。
42.对清理图案的匹配可以通过不同的方式和方法来进行以清理被遗漏的区域m。在图2b的先前说明的示例中,机器人100沿所述障碍物尽可能远地向右行驶直至所述被遗漏的区域m的末端(在地图上直至所述区域m的最低点r)并且在那里借助蜿蜒曲折形的轨迹200继续进行系统化的清洁。由此,实现了用于清理先前被遗漏的区域m的“无缝”过渡,并且在一次运行中实现了对所述待清理的区域g的完整的处理,而不需要两次驶过区域。此外,例如在所述被遗漏的区域m内,可以如此匹配两个相邻的蜿蜒曲折轨迹的距离,使得所述机器人可以在所述区域m也已经被处理完毕之后在点p上(或者在其附近)重新继续所述处理。在图4中,示出了相对于图2中所示出的用于清理所述被遗漏的区域m的方案的替代方案。
43.图4a示出了通过使蜿蜒曲折方向旋转90
°
来匹配用于处理先前由于所述障碍物h而被遗漏的区域m的机器人轨迹的另一种可能方案。举例来说,这作为匹配于所述被遗漏的区域m的几何形状来进行,从而减少在(沿蜿蜒曲折方向)非常窄的但(横向于蜿蜒曲折方向)长的被遗漏的区域中所需的蜿蜒曲折轨迹的数量。在此,例如在点p处中断的轨迹(当机器人在点p处继续作业时,应该已经被清理过的表面)也可以一起被清理。在完成对所述被遗漏的区域m的清理之后,在q点上再次恢复初始的清理图案。
44.图4b示出了通过镜像所述蜿蜒曲折轨迹来匹配所述处理图案(处理图案)或清理图案(清理图案)的另一种可能方案。在此,在p点处检测到被遗漏的区域之后,继续对当前的轨迹进行清理。在该轨迹的末端,在当前的轨迹下方(在被遗漏的区域中)选择新的蜿蜒曲折轨迹。当所述被遗漏的区域m已被完整地清理过之后,所述机器人继续对剩余的区域进行清理。穿过所述区域m的蜿蜒曲折轨迹的直线的子块可以因此被缩短,使得在边缘处(在图4b中的右侧),条带保持未处理,所述机器人然后返回行驶到点q,在所述点q处继续进行对所述区域g的剩余部分的清理。在该示例中,所述返回行驶沿所述区域m的背向所述障碍物h的一侧进行。
45.为了选择对所述处理图案的合适的匹配,机器人可以使用其现有的地图数据。然而,这些地图数据可能是有错误的。替代性地,机器人可以至少部分地重新探测所述被遗漏的区域m的边界。为此,所述机器人例如可以利用边缘跟随行驶至少部分地跟随所述被遗漏的区域的边界。所述被遗漏的区域m的边界例如由所述区域g的边界、障碍物和已经被清理过的表面给出。在此,已经被清理过的表面可以至少部分地被重叠驶过以改善清理结果(参见图12)。
46.图5示出了所述处理图案的匹配的优选的变型方案,即使在复杂的被遗漏的区域的情况下(由于更复杂的障碍物h),该处理图案也是稳健的。在此,在点p1处检测到被遗漏的区域m1之后,所述机器人100驶向第一个“局部的最小值”(也就是说,机器人跟随所述障
碍物沿“棱边”伸入到所述被遗漏的区域中直到角落)。在此,所述机器人100由此例如在边缘跟随行驶期间检测所述局部的最小值,通过机器人的取向指向最后的蜿蜒曲折轨迹的方向,并且/或者通过机器人不再远离最后的蜿蜒曲折轨迹移动,并且/或者通过机器人再次向最后的蜿蜒曲折轨迹移动。在此,所述机器人借助“从下到上”的蜿蜒曲折重新开始系统化的清理。在点p2处,所述机器人重新检测被遗漏的区域m2并且根据先前所述的方法开始清理所述被遗漏的区域。由此,尽管存在复杂的障碍物h,所述机器人100可以一次性系统地并且完整地清理所述区域g。
47.以上说明基本上涉及由于某种原因(例如,由于障碍物h,该障碍物在机器人轨迹的初始规划中未被考虑)也总是在先前遗漏对其进行的处理的区域m(或多个被遗漏的子区域m1、m2组成)的检测(识别本身以及对位置和尺寸的确定)。接下来,还将针对机器人轨迹的动态规划以实现对表面的处理进行说明。原则上,对表面的处理根据所定义的处理图案进行、例如蜿蜒曲折图案,根据该曲线图案所述处理沿蜿蜒曲折形的轨迹进行,所述蜿蜒曲折形的轨迹可以由多个直线的且平行的轨迹节段和相关联的连接节段组合而成。处理图案必须匹配于实际的条件、例如所述区域g的几何形状和位于其中的障碍物。这是根据本文所述的方法在处理过程中动态完成的,以便能够响应于特定的事件、例如可移动的和/或尚未(利用传感器)检测到的障碍物,所述障碍物在初始的轨迹规划过程中没有被考虑或者不能被考虑在内。
48.处理图案包括至少应当由机器人处理的至少一条第一条轨迹(轨迹)。轨迹的宽度w对应于所述机器人的处理模块的宽度,并且所述轨迹可以由多个轨迹节段(轨迹节段)组成(例如,在蜿蜒曲折图案的情况下为多个平行的直线的节段)。在此应该注意的是,为了简化附图中的图示,假定所述处理模块与机器人一样宽。实际上,处理模块不必占据机器人的整个宽度。机器人主要用于尽可能宽地处理所述轨迹。如果适当的话,在轨迹的根据规划的处理过程中针对阻挡机器人的行驶轨迹的障碍物(或其他元素)应予以避让。已知所述机器人在做出关于进一步清理的决定之前完整地绕过所述障碍物的机器人,由此可能会使清理的效率下降。其他机器人在遇到障碍时会停止处理当前的轨迹节段并开始处理另一条轨迹节段。还有一些机器人会跟随所述障碍物直到所述中断条件被满足。所述中断条件例如是机器人再次位于先前被遗漏的轨迹节段上(在识别到障碍物时),或者机器人位于蜿蜒曲折轨迹的另一个尚未被处理的节段上。
49.通过根据利用反应式算法的处理图案的机器人轨迹的轨迹节段的初始规划,机器人可以做出“更智能”的决定,以便在尽可能完整地覆盖所述区域g的情况下提高处理效率。在此,自主移动的机器人100应当根据关于其周围环境的数据来决定其是否应当继续清理当前处理的轨迹节段,或者是否开始清理新的轨迹节段为更有利。为此,将处理增益(处理增益,也就是说,总共被处理的表面增加)相对于呈表面的迂回和/或双重的清理的形式的必要的成本进行权衡并且走廊上的必要规划(以下也称为规划区域)被限制为当前正被处理的轨迹节段以减少规划工作量。接下来,将借助图6和图7来示例性地对其解释。
50.避让操作:当自主移动的机器人在区域g中例如利用蜿蜒曲折形的处理图案清理其上存在一个或多个障碍物h的地板时,因此所述机器人必须能够决定是否绕过障碍物(参见图6,避让轨迹节段200a和200b)为更有效的,从而继续在所述障碍物h后方进行处理或者开始所述蜿蜒曲折轨迹200的新的轨迹节段(参见图7,到下一个常规的轨迹节段的反向轨
迹节段200d)。在此,得出的问题是,待考虑的可能方案的工作量和数量随着规划中所考虑的区域的尺寸的增长呈指数增长。因此,在其中执行所述规划的区域可以被限制为当前穿越的轨迹节段周围的规划区域a(参见图6和图7)以减少规划工作量。规划区域a是例如矩形的并且具有位于所述当前的轨迹节段(规划区域的宽度)的右侧和左侧的预先定义的范围。在所述轨迹节段的方向上(也就是说,在所述机器人的行驶方向上或与所述机器人的行驶方向相反),所述规划区域例如仅由待处理的区域g限制,从而所述规划区域获得走廊的特征。替代性地,所述规划区域也可以在当前的机器人位置上开始并且沿所述轨迹节段延伸直至所述区域g的边界和/或直至最大的规划范围(例如,在所述机器人前方5米处,例如,通过传感器的范围而得出)。
51.如果所述机器人发现阻挡处理当前的轨迹的一个或多个障碍物h,所述机器人会检查是否有可能在走廊(规划区域a)内实现避让。当如在图7中的示例那样:即,在所述规划区域a内的避让为不可能时,所述机器人将搜索用于新的蜿蜒曲折轨迹的起点(例如,在所述反向轨迹节段200d的末端)。因此,所述走廊的宽度会自动地限制可能的避让操作。机器人可以做出有关避让操作的决定,而无需评估规划的结果。为了避免不必要的避让操作,所述走廊(规划区域a)例如是所述机器人或所述轨迹节段的三到四(或五)倍的宽度(在所示出的附图中,宽度w是与机器人的宽度相同的尺寸,但这不一定必须如此)。此外,可以如此选择所述走廊的尺寸,以便可以绕过仅阻挡所述当前的轨迹的障碍物。因此,所述走廊尤其是所述机器人的至少两倍的宽度(横向于所述蜿蜒曲折轨迹200的直线的轨迹节段)。
52.应该注意的是,相对于所述当前正被处理的轨迹节段,所述规划区域a可以是对称的或偏置的。例如,在对称的机器人的情况下或为了简化计算,可以使用对称的规划走廊。在蜿蜒曲折形的处理图案的情况下,可以如此选择所述走廊(规划区域a),使得所述走廊比已经伸入到所述已处理过的区域的更进一步地伸入到所述未处理的区域中。这种情况例如在图8示出,其中横向于所述机器人100的行驶方向的并且相对于所述机器人100的规划区域a仅向右(在地图上向下)延伸一个轨道宽度w,然而向左(在地图上向上)延伸两个轨道宽度(也就是说,2
·
w)。
53.为了避让或绕过一个或多个障碍物,已知不同的算法本身(参见如r.siegwart,i.r.nourbakhsh和d.scaramuzza:“introduction to autonomous mobile robots”,mit出版社)。例如,可以利用“避障算法”(bug algorithm)绕过障碍物。机器人尤其跟随所述障碍物的边缘,直到所述机器人可以返回到属于初始的处理图案的轨迹节段上。当机器人试图绕过障碍物时,所述机器人检查它是否正在被用于规划的规划区域a中移动。当离开所述规划区域时,机器人会中断绕过所述障碍物的避让尝试并搜索与清理图案相对应的新轨迹的起点。这种情况只发生在机器人错误地判断障碍物时,例如因为所述障碍物移动(或已经移动)或者很难通过所述机器人的传感器检测到,由此先前所述的规划已经得到以下:即,已经可以绕过走廊内的障碍物,但是这实际上并非如此。
54.在检查机器人是否以及如何可以绕过障碍物时,所述机器人可以额外地检查在避让操纵期间是否存在处理增益(也就是说,对先前未处理的表面进行处理)。这种情况在图9中示出。例如在沿蜿蜒曲折轨迹行驶期间,障碍物右侧附近的区域然而可能已被清理完毕(参见例如图9,避让轨迹节段200e基本上引导穿过已处理过的区域c;因此沿该避让轨迹节段200e的处理增益将相当低)。在这种情况下,机器人可以检查它是否可以绕过走廊内左侧
的障碍物(例如参见图9,替代性的避让轨迹节段200f仅穿过未处理的区域u,因此沿该轨迹节段200f的处理增益将会较高,所述机器人可以根据所述蜿蜒曲折图案搜索新的轨迹节段的起点(参见图7,反向轨迹节段200d)。例如,对所述清理增益的计算通过将通过规划的避让操作而清理的表面与储存在清理区域中的先前被清理的表面(区域c)进行比较而实现。
55.在第二示例中,机器人100用蜿蜒曲折形的相继地排列的轨迹节段进行清理并且可以在两个方向上以清理增益绕过所述障碍物。为了避免在这种情况下出现隔离的非清理区域,应该在最后的蜿蜒曲折轨迹的方向上绕开所述障碍物。因此,在清理图案上定向的优选方向用于避让指向已清理过的区域的方向的障碍物。根据该方面,在根据图6的本示例中,所述避让轨迹节段200a优于所述避让轨迹节段200b。
56.在一些情况下,机器人100不是对称设计的,而是例如可以在右边缘上具有侧刷头,这允许所述机器人清理直至到所述机器人100右侧的障碍物的边界的表面。与之相反,未处理的区域将保留成为所述机器人100左侧的障碍物。例如,可以在先前所述的用于评估清理增益的方法中考虑这一点。替代性地,机器人可以具有固定的优选方向,所述优选方向可以确保机器人避让位于其右侧的障碍物。
57.作为用于绕过障碍物的附加的判定标准,机器人100可以考虑障碍物h后面的即将预期的清理增益,所述清理增益可以通过清理地图来确定。因此,当在避让操纵期间由可能的双重清理所产生的工作量显著地小于所预期的清理增益时,于是绕过障碍物。这种情况在图10中示出。因此,当沿所述避让轨迹节段200e沿逆时针方向绕过所述障碍物h时,第二次(即,冗余地)处理较小的区域c'(清理增益为零)。然而,通过避让实现了对更大的区域m(较高的清理增益)的进一步处理。因此,当呈先前已清理过的区域(作为区域c'的表面而测量的工作量)的行驶的工作量超过预先定义的边界值时,或者当清理增益低于预先定义的边界值时,机器人因此可以决定搜索新的蜿蜒曲折轨迹的起点并将其沿反向轨迹节段200d进行反向。替代性地,机器人可以基于已清理过的区域c'的待驶过的表面与m的区域的潜在的待清理的表面来做出其决定。在此,当表面块未被清理(即,产生被遗漏的区域)时,则可以利用进一步在上面所述的方法(参见图1至5)重新对所述表面块进行处理以匹配用于清理被遗漏的区域的清理图案。
58.如果当前已清理过的轨迹节段引导穿过先前已清理过的区域,则可以实现类似的过程。例如,所述先前已清理过的区域可以来源于障碍物的绕过。机器人于是例如借助所述预期的清理增益和/或借助由对先前已清理过的区域的再次清理的成本决定,规划的轨迹是否继续通过先前已清理过的区域,或者是否搜索用于新的蜿蜒曲折轨迹的起点。
59.蜿蜒曲折形的处理图案由以对应于关于所期望的重叠的轨迹宽度w(所述处理模块的宽度)的一定距离大致平行的直线的轨迹节段组成。通过例如1厘米至2厘米的小的重叠,尽管机器人在定位和/或控制中有小的不准确性,但仍可保证对表面的完整覆盖。当所述重叠超过50%时,地面至少可以被处理两次。例如,可以利用具有匹配选定的重叠(也就是说,距其的相应的距离)的任意的起始节段和其他的轨迹节段与相应先前的轨迹节段一起形成其他的处理图案。接下来,在图11所示出的示例中,示出了所述机器人在蜿蜒曲折轨迹的轨迹节段的动态的匹配过程中的处理方式以及在下一个节段上进行对新的起点的动态的搜索过程中的处理方式。
60.在所述待处理的区域g中,根据所述预先给定的处理图案,例如首先确定可以彼此
附接的和彼此重叠的直线的轨迹节段(图11中未示出重叠)。在本示例中,在第一条轨迹节段上对起点s1的选择是没有问题的,并且所述起点在所述第一条轨迹节段上固定地位于待清理的区域的拐角的区域中、例如在最接近于所述机器人的当前的位置的每个拐角处。当机器人到达轨迹节段的末端(终点e1、e2、e3)时,搜索后续的轨迹节段上的起点(起点s2、s3、s4)。通常将其确定为尽可能接近机器人100的当前的位置(即,直接在下一条轨迹节段上的相应的终点“上方”,参见图11,点e1和s2)。如果所述起点不可进入(例如,被障碍物阻挡),可以沿轨迹节段移动所述起点,直到确保所述起点的可到达性。在图11中,例如在最后的轨迹节段中存在障碍物h3,该障碍物导致起点s4向左移位。在终点e4处,机器人如先前参考图2至图5所述识别被遗漏的区域m,并且所述机器人可以清理该区域m。由此完成了对所述区域g的处理。当在整个下一条轨迹节段中没有发现可到达的起点时,该区域的清理显然已经完成。在图11中,例如没有第五条直线的轨迹节段并且因此也没有相关联的起点s5。
61.从可进入的起点开始,可以沿新的轨迹在两个方向上确定该轨迹上的可能的清理增益。在此,所述规划可能限于先前所述的走廊,并且可以考虑用于规划绕过障碍物的先前所述的原理和再次清理先前已清理过的区域。
62.基于如此确定的可能的清理增益,机器人100可以决定其开始清理轨迹的方向,或者确定所述机器人是否应当在该轨迹上确定新的起点或者新的轨迹。例如,在此可能出现以下可能性:(a)在一个方向上,由于这里已经被清理或者存在障碍物,因此不可能有清理增益。在第二方向,清理增益是可能的。机器人开始在第二方向上进行清理。(b)可以在两个方向进行清理。然而,在一个方向上,它例如仅对应于机器人的底座表面(即,它小于预先给定的边界值)。机器人在这个方向上移动所述起点,以便能够一次性清理整个可能的轨迹长度。(c)在两个方向上,清理增益小于最小值或等于零,因为例如在右侧和左侧上都存在较大的障碍物。机器人试图确定新的轨迹节段。(d)在两个方向上,清理增益大于边界值;在这种情况下(在实践中很少发生)在清理增益较大的方向进行清理。
63.在该示例中(参见图11),机器人将从起点s2向左处理第二条轨迹节段,直到所述机器人到达障碍物h1。由于在障碍物h1后方不能进行进一步的清理,因此不会尝试绕过障碍物h1并且完成了对第二条轨迹节段的处理(终点e2)。直接在终点e2之上选择第三轨迹节段中的下一个起点s3,由此在障碍物h1之上的第三区段中遗漏对区域m的处理。由于第三轨迹节段中的值得一提的清理增益仅在向右进行时可实现,因此机器人100继续向右侧进行处理,直到它在点x处达到障碍物h2。这可以容易地被绕过,并且机器人借助避让区段200b来调整轨迹节段(也参见图9)。到达第三区段的终点e3,在第四轨迹节段上搜索起点s4。如上所述,由于障碍物h3,将所述起点向左移位。从起点s4开始,只能向左实现清理增益,并继续清理直至终点e4。由于区域g的边界(例如,壁),下一个第五区段(未示出)不可到达,并且因此也不能找到起点s5。清理由此完成。
64.为了机器人100例如借助蜿蜒曲折形的轨迹200来清理表面,所述机器人必须能够确定并校正其位置(例如借助slam方法)。然而在此,在定位和/或定位中总是存在不准确性、例如由于测量或行驶误差,这可能导致在两条已清理过的蜿蜒曲折道之间的未清理的条带。为了避免这种情况,利用当前的轨迹节段(参见图3a,表面t)与先前已清理过的轨迹节段(参见图3a,表面c)之间的重叠处来执行处理。所述重叠是在图12中示例性地示出,其中轨迹节段的宽度由w表示,并且两个相邻的轨迹节段的重叠通过o1、o2、o3、o4来表示。因此
两个相邻的基本平行延伸的轨迹节段之间的距离小于轨迹节段的宽度w(即w
‑
o1,w
‑
o2等)。出现的不准确性通常取决于驶过的表面的材料以及可以通过机器人的传感器所检测到的周围环境并且可以在机器人部署区域内剧烈地波动。因此有利的是,确定定位和/或定位的不准确性的量度并相应地匹配所述清理图案。
65.例如,除了机器人100的位置之外,统计slam方法还可以估计位置不确定性。基于这个估计,例如,当前处理的轨迹节段(区域t)和因此可以确定和匹配先前清理过的区域(区域c),从而确保尽管定位不准确,仍可以完整清理该区域。同时,在定位可靠性高的区域,重叠可以减到最小,从而加快表面清理。
66.例如,所使用的slam方法基于扩展的卡尔曼滤波器或所谓的粒子滤波器,由此确定所预期的机器人位置的和待绕过的障碍物(例如,墙壁)的概率分布。例如,基于这种概率分布,所述机器人相对于待绕过的障碍物的位置的标准偏差现在可以被确定为用于定位的不准确性的量度。如果现在所规划的重叠例如位于标准偏差的两倍处,则理论上的概率约为2%,则在当前正被处理的轨迹节段(表面t)和先前已清理过的表面(c)之间剩余未被清理的区域(负的重叠)。通过重复的定位进一步降低了概率,使得所述概率在实践中不再起作用。定位的不准确性同样可以用slam方法估估计。例如,在第一步骤中估计机器人由于机器人控制的移动命令而处于什么位置(定位)。例如,在第二步骤中,借助对到周围环境的障碍物(例如,墙壁)的距离的测量来校正所述第一估计值(定位)。换句话说,机器人的位置是已知的,但由于测距误差(例如,取决于地面层),所述机器人并不位于初始所规划的位置。在此,必要的校正同样是用于确定必要的重叠o1、o2、o3等的合适的度量。
67.例如在选择用于蜿蜒曲折轨迹的轨迹节段的起点时,可以选择重叠。此外,即使在清理轨迹期间,也可以确定定位的不准确性已经突然恶化或改善(或者定位的准确性,这实际上是相同的)。在这种情况下,例如可以中断对当前的轨迹的处理,以便选择具有匹配于新的不准确性的重叠的轨迹,或者可以动态匹配当前的轨迹的规划的轨迹路线。因此也可以在驶过区段期间匹配重叠(例如,图12中的第一和第二条轨迹节段之间的o1)。
68.在一些情况下,当前正被处理的轨迹节段(表面t)与先前已清理过的表面c之间的特定的重叠可能变得如此之大,以至于无法有效地执行以所选定的清理图案来进行系统化的清理。在这种情况下,可以匹配清理策略。例如,处理图案可以被使用两次,其中所述处理图案在第二次使用中被相对于第一次应用被旋转(例如,大约90度)和/或被移位(例如,大约一半的轨迹宽度)。当不准确性变得如此之大以至于难以或不可能实现有目的的导航时,例如可以使用简单的随机控制的和/或混沌的处理图案。在某些情况下,机器人的定位和测定位置中的不准确性不是各向同性的。例如,在长的走廊中,机器人可以很好地测量其到所述走廊的两个墙壁的距离但没有取向点来确定其沿所述墙壁的位置(即沿与所述墙壁平行的方向)。在这种根据方向的不确定性的情况下,对处理图案如此定向使得其中所述重叠发生的方向是具有较高准确性的方向,这是有利的。在走廊中,机器人因此应该规划平行于墙壁的轨迹节段。
69.机器人可以在整个待清理的区域g中检测位置确定的或者定位的不准确性的量度。不准确性的量度值也可以被存储在机器人的地图中并从一开始就被纳入到未来的工作应用的考虑范围内。在此基础上,所述机器人在所述待清理的区域中可以识别至少一个子区域,在所述子区域中不准确性的量度主要位于边界值之上。然后机器人可以仅为所述子
区域匹配所述处理图案。例如,机器人100因此可以在可被所述机器人用于定位的障碍物的周围的非常大的空间中系统地并且在没有可识别的障碍物的空间的中间混沌地进行清理。例如,机器人可以持续地存储基于所述不准确性的对所述区域g的划分(例如,利用地图)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。