一种pid抗饱和的方法
技术领域
1.本发明属于自动变速器控制技术领域,更具体的说是涉及一种pid抗饱和的方法。
背景技术:
2.pid控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好,可靠性高,被广泛应用于工业控制领域,常规的pid控制由比例、积分、微分三项控制组合而成。pid控制器是一种线性的控制器。
3.pid控制器各个矫正环节的作用如下:
4.p比例环节:比例环节是基于偏差进行调节的,即有差调节,成比例的反应控制系统的偏差信号。响应迅速但是准确度不足。
5.i积分环节:积分环节能对误差进行记录,主要用于消除稳态误差,但是积分作用的引入使系统的稳定性下降,尤其在大偏差阶段的积分往往会产生过大的超调。
6.d微分作用:本环节的主要作用是根据偏差值的变化趋势做出反应,加快系统反应,有效的较小超调增加系统的稳定性,不利之处是微分作用会导致系统抗扰动能力降低。
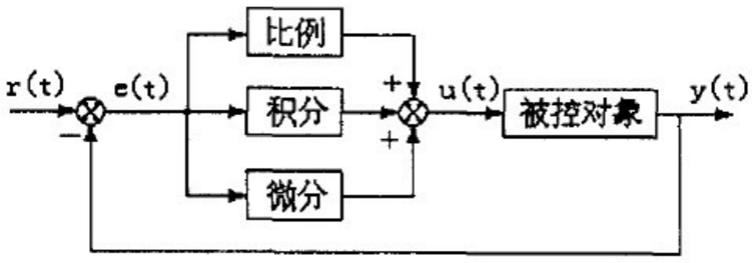
7.然而,在实际运用场景中,控制对象往往是非线性的、时变不确定的,难以精确预测被控对象的突变。往往会由于被控对象突发的误差大幅变化,积分器由于误差的大幅增加而有很大的累计量,当误差变为负时,需要很长时间去消除由于超调累积的累计量。这就使得pid控制系统出现较大的时滞性,影响控制精度。pid控制系统原理框图如图1所示。
8.因此,如何提供一种pid抗饱和的方法成为了本领域技术人员亟需解决的问题。
技术实现要素:
9.有鉴于此,本发明提供了一种pid抗饱和的方法,。
10.为了实现上述目的,本发明采用如下技术方案:
11.一种pid抗饱和的方法,包括:在标准pid的基础上,对积分控制环节进行优化,对i项增加限幅环节与反馈环节,限制i项输出的最大最小值,以及判断系统饱和的方向对i项累积量进行反馈,当pid控制系统发生过饱和现象时,首先对积分环节最终输出进行限制,然后根据积分累计饱和方向,削弱积分环节的积分量。
12.进一步的,包括如下步骤:
13.s1,计算期望输出r(t)与实际输出y的差值,得到期望偏差e(t);
14.s2,期望偏差输入至比例调节器,计算比例调节器的输出u3=e(t)*kp,其中kp为比例系数;
15.s3,期望偏差输入至微分调节器,对其进行微分计算,计算微分调节器的输出其中kd为微分系数;
16.s4,期望偏差输入至积分调节器,对其进行积分计算,并在积分环节的输出增加限幅环节,计算积分环节输出与限幅环节输出的差值,并将差值乘以反馈系数,反馈到积分环
节输入中,得到积分调节器输出u1;
17.s5,u(t)=u1 u2 u3,u(t)为比例、积分、微分三项控制组合而成的输出。
18.进一步的,采用如下公式计算积分调节器输出u1:
19.①
ki为积分系数、fd为反馈系数;
20.②
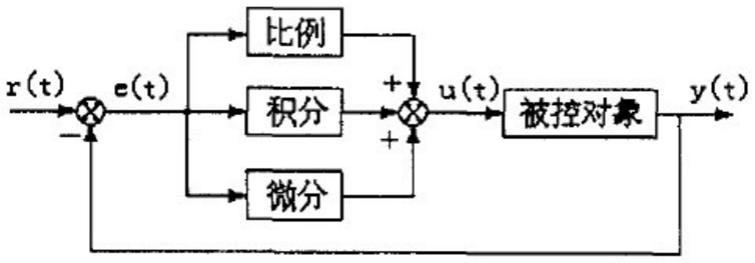
δu=u
‑
u1,u1为u限幅后的输出。
21.进一步的,u(t)作用于被控对象上,对被控对象的实际输出变量y进行调节。
22.本发明的有益效果在于:
23.本发明限制积分环节的输出、反向计算降低输入对积分环节的影响,由于对积分环节进行了限幅,当控制对象出现失控等情况时,pid控制的输出不会失控,增强系统的鲁棒性;由于增加了反向计算,当控制对象超调量过大时,可以降低积分过饱和的累计量,从而解决了系统迟滞引起的pid控制积分环节过饱和的问题。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
25.图1为标准pid控制系统原理框图。
26.图2为本发明的原理框图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参考图2,本发明提供了一种pid抗饱和的方法,包括:在标准pid的基础上,对积分控制环节进行优化,对i项增加限幅环节与反馈环节,限制i项输出的最大最小值,以及判断系统饱和的方向对i项累积量进行反馈,当输出未饱和时,f
d
*
△
u=0,不会对积分器造成影响,当系统发生过饱和现象时,首先对积分环节最终输出进行限制,然后根据积分累计饱和方向,削弱积分环节的积分量。目的是降低扰动工况下而产生的积分过饱和对系统产生的影响。
29.标准的pid其控制规律为:
[0030][0031]
本发明具体包括如下步骤:
[0032]
s1,计算期望输出r(t)与实际输出y的差值,得到期望偏差e(t);
[0033]
s2,期望偏差输入至比例调节器,计算比例调节器的输出u3=e(t)*kp,其中kp为比例系数;
[0034]
s3,期望偏差输入至微分调节器,对其进行微分计算,计算微分调节器的输出其中kd为微分系数;
[0035]
s4,期望偏差输入至积分调节器,对其进行积分计算,并在积分环节的输出增加限幅环节,计算积分环节输出与限幅环节输出的差值,并将差值乘以反馈系数,反馈到积分环节输入中,得到积分调节器输出u1;采用如下公式计算积分调节器输出u1:
[0036]
①
ki为积分系数、fd为反馈系数;
[0037]
②
δu=u
‑
u1,u1为u限幅后的输出。
[0038]
s5,u(t)=u1 u2 u3,u(t)为比例、积分、微分三项控制组合而成的输出。u(t)作用于被控对象上,对被控对象的实际输出变量y进行调节。
[0039]
本发明限制积分环节的输出、反向计算降低输入对积分环节的影响,由于对积分环节进行了限幅,当控制对象出现失控等情况时,pid控制的输出不会失控,增强系统的鲁棒性;由于增加了反向计算,当控制对象超调量过大时,可以降低积分过饱和的累计量,从而解决了系统迟滞引起的pid控制积分环节过饱和的问题。
[0040]
本发明增加pid控制器i项环节的限幅优化pid控制器i项环节ki计算方法,应用在tcu控制软件eagle ii中,通过实际工况应用证明,在被控系统出现卡滞的工况下,该创新依靠限幅环节与反馈环节,将i项的饱和振荡降低。从而保证了pid控制器的稳定性与鲁棒性,同时提高了对硬件的精确控制。
[0041]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。