技术特征:
1.一种用于机电系统含预定性能和死区输入约束的输出反馈轨迹跟踪控制方法,其特征在于,建立含有死区输入的机电系统模型,对所述机电系统死区模型进行线性化处理,给出参考跟踪轨迹,定义跟踪误差并引入预定性能函数,将原系统转化为具有预定性能约束的系统;针对机电系统中的电机角位置、角速度、电机电流三种状态变量不易测量或测量精度不高的问题,设计神经网络状态观测器获得上述状态的估计值;采用命令滤波器技术,解决传统反步法中的“复杂度爆炸”的问题;基于自适应反步法和神经网络状态观测器,设计自适应输出反馈学习控制方案;包括以下步骤:第一步,建立含有死区输入的机电系统模型其中,分别表示为电机角位置,电机角速度,电机角加速度,i为电机电流,v0为输入电压,n=mg0g/(2k
τ
) w0g0g/k
τ
,b=b0/k
τ
,j为转动惯量,m为连杆质量,g0为连杆长度,w0为负载系数,r0为负载半径,b0为粘性摩擦系数,g为重力系数,g为电枢电感,r为电枢电阻,k
τ
和k
t
分别为转换系数和反电动势系数,构建含有机电系统执行单元变流器运行死区,模型为其中,υ(t)为输入,π
r
(υ(t)),π
l
(υ(t))分别在区间[c
r
, ∞),(
‑
∞,c
l
]上是连续的,并且正常数k
l0
,k
l1
,k
r0
,k
r1
,满足其中,且为有界的,其上确界满足由(2),(3)得,该模型可转化为u=∏(υ(t))=h
t
(t)υ(t)υ(t) d(υ(t))=f(t)υ(t) d(υ(t))
ꢀꢀꢀꢀ
(4)引入状态变量x1,x2,x3,使x1=q为电机角位置,为电机角速度,x3=i为电机电流,系统(1)可以转化为其中,为机电系统中
光滑不确定性函数,y为系统输入和输出,期望跟踪轨迹为y
d
;第二步,定义跟踪误差为ν(t)=y
‑
y
d
,为使获得所需的系统超调量和更快的收敛速率,引入预定性能函数其中,引入变换可以得到对(7)求导其中定义坐标变换对(9)求导可得其中,为权值误差;第三步,将(5)转化为(11)式的矩阵方程其中,其中,采用径向基神经网络,(11)的光滑不确定函数和系统状态变量x可由(12)中的和表示
其中,为的估计值,为x的估计值,并且满足其中,为状态变量的估计值,θ
i
为理想权值的估计,为隐含层的输出,最小逼近误差ε
i
和逼近误差δ
i
分别定义为分别定义为满足,定义状态观测器误差为e=[e1,...,e
n
]
t
,由(11),(12),可以得出其中,δ=[δ1,...,δ
n
]
t
,基于状态观测器输出值,采用命令滤波器,设计如下的坐标变换其中,χ
i
为虚拟误差面,α
i
‑1为虚拟控制信号,ρ
i
为边界层误差,s
i
是关于虚拟控制信号α
i
‑1,并且由命令滤波器产生,满足如下条件其中,m
i
为设计参数;第四步,由(12)中对于光滑不确定函数和系统状态变量x的估计值,设计如下的基于状态观测器的自适应输出反馈控制器:[1]设计虚拟控制信号α1和自适应律为为其中,c1>0,μ1>0,γ1为设计参数,
虚拟控制器(17)和自适应律(18)的来源如下:构造如下的lyapunov函数v0=e
t
ne
ꢀꢀꢀ
(19)其中,n为矩阵,满足n=n
t
>0,由(14),(19),可得其中,m为矩阵,满足a
t
n na=
‑
m,λ
min
(m)为矩阵m的最小特征值,设计lyapunov函数如下由(10),(20),(21)有经过计算,可得到其中,将(17),(18)代入(23)得到[2]设计虚拟控制信号α2和自适应律为为其中,c2>0,μ2>0,γ2为设计参数,虚拟控制器(25)和自适应律(26)的来源如下:由(12),(15)可得构造lyapunov函数如下
由(15),(16)可以得到其中,y2(
·
)为连续函数,并且满足|y2(
·
)|<q2,q2为正标量,与[1]推导类似,经过计算,可以得到将(25),(26)代入(30)得到[3]设计如下的控制信号和自适应律和自适应律和自适应律和自适应律其中,c3>0,μ3>0,γ3,l1,为设计参数,实际控制器(32),(33)和自适应律(34)的来源如下:设计lyapunov函数如下与[1]推导过程类似,可以得出由(36)可以得出其中,为常数,满足即,λ为有界的正常数,将实际控制器(32),(33),自适应律(34)和(37)代入(36),得到
其中,r
*
为有界正常数;第五步,闭环系统稳定性分析由上述推导可知对(38)中的放缩,可有其中,k为有界正标量,选择合适的参数可得进一步,由(40)和lyapunov函数的定义,我们可以得到lyapunov函数v3和闭环系统中的所有信号都是有界的,根据(15),(16)和(17),可以获得的有界性,类似于上述分析,在(6)中可以得到因此,跟踪误差始终保持在性能边界内。
技术总结
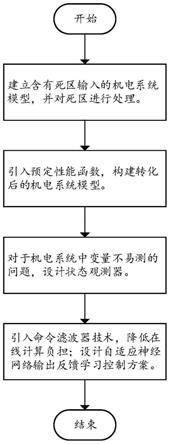
一种用于机电系统含预定性能和死区输入约束的输出反馈轨迹跟踪控制方法。首先建立含有死区输入的机电系统模型,对死区模型线性化处理,给出参考跟踪轨迹;其次,定义跟踪误差并引入预定性能函数,将原系统转化为含预定性能约束的系统;针对机电系统中角位置、角速度、电机电流不易测量或测量精度不高的问题,设计神经网络状态观测器,对机电系统状态进行估计;最后,采用命令滤波器技术,解决传统反步法中“复杂度爆炸”的问题,在预定性能控制和死区输入约束下,结合自适应反步法和神经网络状态观测器,构造自适应输出反馈控制;本发明有效提升状态未知系统的瞬态和稳态性能,精确实现轨迹跟踪,适用于精确定位的机电系统控制。适用于精确定位的机电系统控制。适用于精确定位的机电系统控制。
技术研发人员:宗广灯 王玉迪 褚晓广 孙海滨 杨东 齐文海
受保护的技术使用者:曲阜师范大学
技术研发日:2021.09.09
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。