1.本发明涉及串焊机技术领域,尤其是涉及一种用以太阳能电池板焊接的串焊机。
背景技术:
2.叠瓦技术不同于传统组件封装方式,是指将传统电池片切为小片,通过导电胶直接衔接两片电池,将其叠加黏贴在一起,再将电池串连接起来。传统组件一般都会保留约2~3毫米的电池片间距,而叠瓦工艺通过交叠电池小片,实现无电池片间距,提高组件封装效率。同样组件面积内可放置多于常规组件13%以上的电池片。因此,叠瓦组件具有输出功率高、内部损耗低、热斑效应小等优势。本发明旨在提供一种串焊机,用以实现太阳能电池的叠加黏贴连接。
技术实现要素:
3.本发明的目的在于提供一种串焊机,用以实现太阳能电池的叠加黏贴连接。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
4.为实现上述目的,本发明提供了以下技术方案:
5.本发明提供的一种串焊机,包括电池片供片装置、取料移动机构、点胶移动载台、喷射点胶机构、中间移动机构、焊接机构以及平移翻转机构,其中,所述取料移动机构设置在所述电池片供片装置的一侧,电池片放置在所述电池片供片装置上,所述取料移动机构能将所述电池片供片装置上的所述电池片放置在所述点胶移动载台上;所述喷射点胶机构设置在所述点胶移动载台的一侧,所述喷射点胶机构能向所述点胶移动载台上的电池片喷射导电银胶,所述焊接结构能对通过所述中间移动机构将所述点胶移动载台上的电池片移动至所述焊接机构上的电池片进行焊接处理,所述平移翻转机构用于将形成在所述焊接机构上的电池串移向出料料盘上;所述串焊机还包括汇流条拉出切断机构或汇流条移放结构,所述汇流条拉出切断机构或所述汇流条移放结构用以向所述焊接结构的焊接皮带结构放置汇流条。
6.进一步地,所述电池片供片装置括第一架体、第一支撑结构、第一驱动装置以及吹气装置,所述第一驱动装置以及所述吹气装置连接在所述第一架体上,所述第一支撑结构与所述第一驱动装置相连接且所述第一驱动装置能带动所述第一支撑结构上、下移动,通过所述第一驱动装置带动所述第一支撑结构向下移动以及通过所述吹气装置向叠放在所述第一支撑结构上的电池片吹气,以用于实现所述取料移动机构仅吸附所述电池片支撑结构上位于最上面的一个所述电池片。
7.进一步地,所述取料移动机构包括第二吸附结构、第二移动结构以及修正结构,所述第二吸附结构包括两个第二吸附机械手且两个所述第二吸附机械手均连接在所述第二移动结构上,所述修正结构设置在所述第二吸附结构下方且所述修正结构用以调整放置在所述修正结构上的电池片的位置,所述第二移动结构能带动所述第二吸附结构移动且当一个所述第二吸附机械手移动至所述修正结构的正上方时,另一所述第二吸附机械手位于所
述点胶移动载台上。
8.进一步地,所述修正结构包括修正平台、x向定位机构和y向定位机构,所述x向定位机构和所述y向定位机构连接在所述修正平台上,所述修正平台上形成一个或两个以上修正支撑面,所述x向定位机构和所述y向定位机构用以调整所述修正平台上电池片的位置;所述y向定位机构包括y向气缸、y向定位条以及y向调节杆,所述y向定位条固定在所述修正平台上,所述y向气缸设置在所述修正平台的下方并通过y向连接结构与所述y向调节杆相连接,每个所述修正支撑面均对应有所述y向定位条和所述y向调节杆,当所述y向气缸动作时,能带动所述y向调节杆推动所述修正支撑面上的电池片向所述y向定位条移动,使得所述电池片的长边分别与对应的所述y向定位条相贴合;所述x向定位机构包括气爪手指气缸、x向推动板和气爪连接结构,两个相对设置的所述x向推动板通过所述气爪连接结构与所述气爪手指气缸相连接,当所述气爪手指气缸动作时,能带动两个所述x向推动板向靠近对方的方向移动使得所述修正平台上的电池片的两短边夹在所述两个x向推动板之间。
9.进一步地,所述喷射点胶机构还包括第三支撑架体、喷胶嘴、水平调节机构和竖直调节机构,其中,所述喷胶嘴设置在所述点胶移动载台上方,所述水平调节机构与所述喷胶嘴相连接,所述水平调节机构与所述竖直调节机构相连接,所述竖直调节机构连接在所述第三支撑架体上,所述水平调节机构和所述竖直调节机构分别用以调节所述喷胶嘴水平方向上的位置以及竖直方向上的位置,所述水平调节机构和所述竖直调节机构均为手动微调滑台。
10.进一步地,所述焊接机构还包括第四支撑架以及焊灯结构,所述焊接皮带结构和所述焊灯结构与所述第四支撑架相连接;所述焊接皮带结构上形成有电池片放置区、预热区、焊接区以及缓降温区,所述焊灯结构设置在所述焊接区的上方。
11.进一步地,所述焊灯结构包括焊灯支撑架体、加热灯结构、焊灯驱动气缸、压针结构以及压针驱动气缸,所述焊灯驱动气缸和所述压针驱动气缸连接在所述焊灯支撑架体上,所述压针结构位于所述加热灯结构的下方侧,所述加热灯结构与所述焊灯驱动气缸相连接且所述焊灯驱动气缸能带动所述加热灯结构上下移动,所述压针结构与所述压针驱动气缸相连接且所述压针驱动气缸能带动所述压针结构上下移动。
12.进一步地,所述汇流条拉出切断机构包括汇流条支撑架、助焊剂容纳结构、打孔结构、剪切结构、拉取结构以及汇流条移动结构,其中,所述助焊剂容纳结构、所述打孔结构、所述剪切结构以及所述拉取结构连接在所述汇流条支撑架上,汇流条盘连接在所述汇流条支撑架上,所述汇流条盘上的汇流条能依次经过所述助焊剂容纳结构、所述打孔结构并引向所述剪切结构,当所述剪切结构处于复位状态时,所述拉取结构能拉住所述汇流条的端部并能带动汇流条向远离所述剪切结构的方向移动,所述剪切结构用以剪切经过其的所述汇流条,所述汇流条移动结构能将剪断后所述汇流条移向所述焊接皮带结构。
13.进一步地,所述汇流条移放结构包括汇流支架、汇流条吸附装置、汇流条驱动装置以及汇流条放置台,所述汇流条吸附装置通过所述汇流条驱动装置连接在所述汇流支架上且所述汇流条驱动装置能带动所述汇流条吸附装置移动,所述汇流条放置台跨接在所述焊接皮带结构上,所述汇流条吸附装置用以吸附放置在所述汇流条放置台上汇流条,且所述汇流条放置台上设置有胶盒。
14.进一步地,所述平移翻转机构包括平移传送带结构、平移结构和翻转结构,其中,
所述平移传送带结构与所述焊接机构相邻,所述翻转结构设置在所述平移结构的一侧且所述平移结构用以将所述焊接皮带结构上的电池串放置在所述翻转结构上;所述平移结构包括平移吸嘴和平移驱动结构,所述平移吸嘴与所述平移驱动结构相连接,所述平移驱动结构能带动所述平移吸嘴沿水平以及竖直方向移动,所述平移吸嘴设置在所述平移传送带结构上方;所述翻转结构包括翻转吸嘴和翻转驱动结构,所述翻转吸嘴与所述翻转驱动结构相连接,所述翻转驱动结构能带动所述翻转吸嘴以及设置在所述翻转吸嘴上的电池串翻转。
15.本发明提供的一种串焊机,包括电池片供片装置、取料移动机构、点胶移动载台、喷射点胶机构、中间移动机构、焊接机构以及平移翻转机构,其中,取料移动机构设置在电池片供片装置的一侧,电池片放置在电池片供片装置上,取料移动机构能将电池片供片装置上的电池片放置在点胶移动载台上;喷射点胶机构设置在点胶移动载台的一侧,喷射点胶机构能向点胶移动载台上的电池片喷射导电银胶,焊接结构能对通过中间移动机构将点胶移动载台上的电池片移动至焊接机构上的电池片进行焊接处理,平移翻转机构用于将形成在焊接机构上的电池串移向出料料盘上;串焊机还包括汇流条拉出切断机构或汇流条移放结构,汇流条拉出切断机构或汇流条移放结构用以向焊接结构的焊接皮带结构放置汇流条。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1本发明实施例提供的电池片供片装置的结构示意图;
18.图2是本发明实施例提供的导向杆与第一支撑结构相配合的示意图;
19.图3是本发明实施例提供的取料移动机构(未示意出修正结构)的结构示意;
20.图4是本发明实施例提供的修正结构的结构示意图;
21.图5是本发明实施例提供的修正结构的结构示意图;
22.图6是本发明实施例提供的修正结构的结构示意图;
23.图7是本发明实施例提供的喷射点胶机构的结构示意图;
24.图8是本发明实施例提供的焊接机构的结构示意图;
25.图9是本发明实施例提供的焊灯结构的结构示意图;
26.图10是本发明实施例提供的压针驱动气缸与压针结构相连接的结构示意图;
27.图11是图10中a处的局部放大图;
28.图12是本发明实施例提供的汇流条拉出切断机构的结构示意图;
29.图13是图12中b处的局部放大图;
30.图14是图12中c处的局部放大图;
31.图15是本发明实施例提供的剪切结构的结构示意图;
32.图16是本发明实施例提供的拉取结构的结构示意图;
33.图17是图16中d处的局部放大图;
34.图18是本发明实施例提供的平移结构的结构示意图;
35.图19是本发明实施例提供的翻转结构的结构示意图;
36.图20是本发明实施例提供的翻转结构的结构示意图;
37.图21是本发明实施例提供的串焊机的结构示意图(具有汇流条拉出切断机构);
38.图22是图21中e处的局部放大图;
39.图23是本发明实施例提供的串焊机的结构示意图(具有汇流条拉出切断机构);
40.图24是图23中f处的局部放大图;
41.图25是本发明实施例提供的串焊机的结构示意图(不具有汇流条拉出切断机构);
42.图26是图25中g处的局部放大图。
43.图中1
‑
电池片供片装置;110
‑
第一架体;120
‑
第一支撑结构;130
‑
吹气嘴;140
‑
第一驱动电机;150
‑
导向杆;160
‑
配合缺口;
[0044]2‑
取料移动机构;210
‑
第二吸附机械手;220
‑
第二移动结构;230
‑
修正结构;231
‑
修正平台;232
‑
修正支撑面;233
‑
y向气缸;234
‑
y向定位条;235
‑
y向调节杆;236
‑
气爪手指气缸;237
‑
x向推动板;
[0045]3‑
喷射点胶机构;310
‑
第三支撑架体;320
‑
喷胶嘴;330
‑
水平调节机构;340
‑
竖直调节机构;
[0046]4‑
点胶移动载台;
[0047]5‑
焊接皮带结构;510
‑
放置区;520
‑
预热区;530
‑
焊接区;540
‑
缓降温区;550
‑
焊接皮带;560
‑
支撑辊驱动电机;
[0048]6‑
焊灯结构;610
‑
焊灯支撑架体;620
‑
加热灯结构;630
‑
焊灯驱动气缸;640
‑
压针结构;641
‑
小压针;642
‑
小压针支撑板结构;650
‑
压针驱动气缸;
[0049]7‑
汇流条移放结构;
[0050]8‑
汇流条拉出切断机构;810
‑
汇流条支撑架;820
‑
助焊剂容纳结构;821
‑
焊剂盒;822
‑
贯穿孔;823
‑
注液孔;830
‑
打孔结构;831
‑
打孔驱动气缸;832
‑
第一动模板;833
‑
第二动模板;834
‑
定模板;835
‑
竖向导向柱;840
‑
剪切结构;841
‑
上剪切刀;842
‑
下剪切刀;843
‑
上剪切驱动气缸;844
‑
下剪切驱动气缸;850
‑
拉取结构;851
‑
夹手驱动结构;852
‑
放料载台;853
‑
夹手气缸;854
‑
中间连接件;855
‑
三角形板件;856
‑
底部支撑结构;857
‑
夹取板;860
‑
汇流条移动结构;870
‑
汇流条盘;880
‑
支撑滚轮;
[0051]9‑
平移翻转机构;910
‑
平移传送带结构;920
‑
平移竖向气缸;930
‑
平移横向梁;940
‑
平移驱动电机;950
‑
翻转梁;960
‑
翻转驱动电机;970
‑
翻转连接杆;980
‑
平移吸嘴;990
‑
翻转吸嘴;
[0052]
10
‑
中间移动机构。
具体实施方式
[0053]
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
[0054]
实施例1:
[0055]
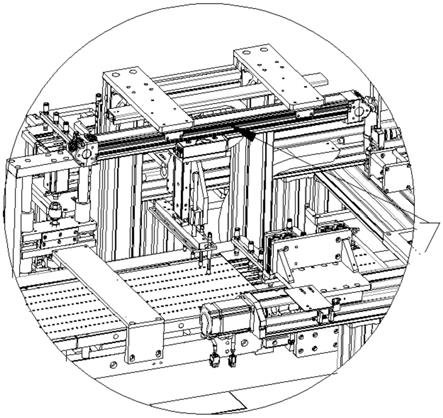
参见图21和图23,本发明提供了一种串焊机,包括电池片供片装置1、取料移动机构2、点胶移动载台4、喷射点胶机构3、中间移动机构10、焊接机构以及平移翻转机构9,其中,取料移动机构2设置在电池片供片装置1的一侧,电池片放置在电池片供片装置1上,参见图22,示意出了两个电池片供片装置1,取料移动机构2能将电池片供片装置1上的电池片放置在点胶移动载台4上,参见图21,示意出了点胶移动载台4,点胶移动载台4可以为传送带驱动结构;喷射点胶机构3设置在点胶移动载台4的一侧,喷射点胶机构3能向点胶移动载台4上的电池片喷射导电银胶,参见图21,示意出了喷射点胶机构3与点胶移动载台4的位置关系,焊接结构能对通过中间移动机构10将点胶移动载台4上的电池片移动至焊接机构上的电池片进行焊接处理,平移翻转机构9用于将形成在焊接机构上的电池串移向出料料盘上。参见图23,示意出了焊接结构,当电池片经过喷射点胶机构3,电池片上面会喷有导电银胶,在焊接机构上,将两个电池片叠放,且对导电银胶较热,然后在导电银胶冷却过程中实现两个电池片的叠加黏贴连接,串焊机还包括汇流条拉出切断机构8,汇流条拉出切断机构8用以向焊接结构的焊接皮带结构5放置汇流条,将电池片依次按序叠加,且首尾连接导流片,以形成电池串。
[0056]
关于电池片供片装置1,具体结构如下:参见图1,电池片供片装置1括第一架体110、第一支撑结构120、第一驱动装置以及吹气装置,第一驱动装置以及吹气装置连接在第一架体110上,第一支撑结构120与第一驱动装置相连接且第一驱动装置能带动第一支撑结构120上、下移动,通过第一驱动装置带动第一支撑结构120向下移动以及通过吹气装置向叠放在第一支撑结构120上的电池片吹气,以用于实现取料移动机构2仅吸附电池片支撑结构上位于最上面的一个电池片。具体工作过程如下:当取料移动机构2吸附第一支撑结构120上位于最上面的一个电池片时,第一驱动装置同步带动第一支撑结构120向下移动至设定位置,同时启动吹气装置,吹气装置向电池片吹气,利于实现和最上面的一个电池片相接触的另一电池片与最上面的一个电池片相分离,从而以用于实现取料移动机构2仅吸附第一支撑结构120上位于最上面的一个电池片,保证串焊机可正常工作。当取料移动机构2吸附完一个电池片且移离第一支撑结构120时,吹气装置停止工作,第一驱动装置带动第一支撑结构120向上移动,当位置检测传感器检测到电池片时,位置检测传感器将信号传送控制系统以使控制系统控制第一驱动装置停止工作,以保证每次第一支撑结构120上位于最上位置的电池片能位于同一位置,便于取料移动机构2对电池片吸附,也便于吹气装置能始终吹向第一支撑结构120上位于最上位置的电池片和与最上面的一个电池片相接触的另一电池片。
[0057]
关于吹气装置,吹气装置包括吹气嘴130,吹气嘴130上分布有出气小孔,出气小孔朝向第一支撑结构120,出气小孔的直径范围为0.1mm~0.4mm,利于从吹气嘴130喷出气流集中喷向电池片,出气小孔的直径优选为0.2mm。另外,关于吹气装置,还包括气源、气泵以及阀体等结构,采用现有技术可实现向吹气嘴130提供气体即可,这里就不做过多的限定。
[0058]
关于第一驱动装置,第一驱动装置包括第一驱动电机140和丝杠机构,第一驱动电机140的输出轴与丝杠机构的丝杠相连接,丝杠机构的滑块与第一支撑结构120相连接,滑块通过连接轴与第一支撑结构120相连接,且连接轴穿过第一支撑结构120。第一驱动电机140为伺服电机,当第一驱动电机140带动丝杠正转时,滑块向上移动,从而实现第一支撑结构120向上移动;当第一驱动电机140带动丝杠反转时,滑块向下移动,从而实现第一支撑结
构120向下移动,实现第一支撑结构120位置的调节。
[0059]
关于第一支撑结构120,具体如下:第一支撑结构120为板状结构,第一架体110上设置导向杆150,导向杆150用以限位电池片叠放在第一支撑结构120上。参见图2,第一支撑结构120的周向侧壁上开设配合缺口160,导向杆150分别插入对应配合缺口160。参见图3,第一支撑结构120的四个侧壁上均设置配合缺口160,每个配合缺口160均对应一个导向杆150,通过六个导向杆150对叠放在第一支撑结构120的电池片进行限位。
[0060]
优选地,存在导向杆150其在第一架体110上的位置可调节,配合缺口160为长条口,沿配合缺口160的长度方向能向靠近第一支撑结构120的中心或远离第一支撑结构120的中心的方向调节导向杆150的位置。参见图2,图中的左右两侧以及上侧的导向杆150相对于第一架体110的位置可调节,通过调节导向杆150在第一架体110上的位置,可以适合不同方向大小的矩形电池片。导向杆150可以与第一架体110通过螺栓实现可拆卸连接。
[0061]
关于取料移动机构2,具体如下:取料移动机构2包括第二吸附结构、第二移动结构220以及修正结构230,第二吸附结构包括两个第二吸附机械手210且两个第二吸附机械手210均连接在第二移动结构220上,修正结构230设置在第二吸附结构下方且修正结构230用以调整放置在修正结构230上的电池片的位置,第二移动结构220能带动第二吸附结构移动且当一个第二移动结构220移动至修正结构230的正上方时,另一吸第二移动结构220位于点胶移动载台4上。参见图3,示意出了两个第二吸附机械手210,当两个第二吸附机械手210位于第一工位时,其中一个第二吸附机械手210(称为右吸附机械手)位于电池片供片装置1的正上方(第二吸附机械手210包括两排吸嘴,电池片供片装置1的个数为两个,第二吸附机械手210的两排吸嘴分别与两个电池片供片装置1相对应)、另一第二吸附机械手210(称为左吸附机械手)位于修正结构的正上方,当两个第二吸附机械手210完成取料后,两个第二吸附机械手210在移动结构的带动下(水平)移动,直至移动至第二工位,此时,右吸附机械手位于修正结构的正上方、左吸附机械手位于点胶移动载台4的正上方,右吸附机械手将吸附的电池片7放置在修正结构上,左吸附机械手将电池片放在点胶移动载台4上,完成后两个第二吸附机械手210在第二移动结构220的带动下复位。关于第二移动结构220,采用驱动电机和丝杠机构即可,实现第二吸附结构沿水平方向上的移动。
[0062]
另外,关于第二吸附机械手210,包括吸嘴,吸嘴与空压机、阀体等结构相连接,当需要吸嘴吸附电池串时,通过抽真空的方式实现吸嘴与电池串的吸附连接,向吸嘴内充入气体,可以解除吸嘴与电池串的连接。
[0063]
关于修正结构230,具体如下:修正结构230包括修正平台231、x向定位机构和y向定位机构,x向定位机构和y向定位机构连接在修正平台231上,修正平台231上形成两个修正支撑面232(左吸附机械手的两排吸嘴分别与两个修正支撑面232相对应),x向定位机构和y向定位机构用以调整修正平台231上电池片的位置。
[0064]
关于y向定位机构,具体结构如下:y向定位机构包括y向气缸233、y向定位条234以及y向调节杆235,y向定位条234固定在修正平台231上,y向气缸233设置在修正平台231的下方并通过y向连接结构与y向调节杆235相连接,每个修正支撑面232均对应有y向定位条234和y向调节杆235,当y向气缸233动作时,能带动y向调节杆235推动修正支撑面232上的电池片向y向定位条234移动,使得电池片的长边分别与对应的y向定位条234相贴合。参见图4,示意出了两个修正支撑面232,每个修正支撑面232分别对应一个y向定位条234,y向定
位条234固定在修正平台231上。参见图5,示意出了y向气缸233,y向气缸233的输出轴通过连接结构与y向调节杆235相连接,参见图4,示意出了每个修正支撑面232均对应有两个y向调节杆235,y向调节杆235从修正平台231的底部插入修正支撑面232,当y向气缸233的输出轴伸出时,能带动y向调节杆235使其推动修正支撑面232上的电池片向y向定位条234移动,使得两个电池片的长边分别与对应的y向定位条234相贴合;当y向气缸233的输出轴退回时,y向调节杆235向远离对应的y向定位条234的方向移动。
[0065]
关于x向定位机构,具体结构如下:参见图6,x向定位机构包括气爪手指气缸236、x向推动板237和气爪连接结构,两个相对设置的x向推动板237通过气爪连接结构与气爪手指气缸236相连接,当气爪手指气缸236动作时,能带动两个x向推动板237向靠近对方的方向移动使得修正平台231上的电池片的两短边夹在两个x向推动板237之间。关于y向气缸233以及气爪手指气缸236的动作情况,包括控制系统和检测装置,当串焊机的检测装置检测到修正支撑面232有电池片时,控制系统控制y向气缸233以及气爪手指气缸236动作,当检测到电池片与x向推动板237以及y向定位条234相接触后,控制系统控制y向气缸233以及气爪手指气缸236复位。
[0066]
关于喷射点胶机构3,具体结构如下:喷射点胶机构3还包括第三支撑架体310、喷胶嘴320、水平调节机构330和竖直调节机构340,其中,喷胶嘴320设置在点胶移动载台4上方,水平调节机构330与喷胶嘴320相连接,水平调节机构330与竖直调节机构340相连接,竖直调节机构340连接在第三支撑架体310上,水平调节机构330和竖直调节机构340分别用以调节喷胶嘴320水平方向上的位置以及竖直方向上的位置,水平调节机构330和竖直调节机构340均为手动微调滑台。喷胶嘴320为压电驱动撞针式喷射阀,由于无需实时调整喷胶嘴320的位置,所以,喷胶嘴320的位置调节优选设置成手动调节的方式。由于喷胶嘴320与点胶移动载台4的位置影响着打胶的效果,采用现有技术中的手动微调滑台,不仅调节方便,而且能够精准的调整喷胶嘴320的位置。
[0067]
关于在电池片上涂胶的位置情况,电池片上的胶体呈细线状,宽度在1mm~1.2mm,沿电池片的长度方向分布且靠近电池片的一侧边,以实现电池片的叠片连接。
[0068]
点胶移动载台4为传送皮带结构,喷胶嘴320位于点胶移动载台4的上方,通过点胶移动载台4带动电池片移动,且当电池片经过喷胶嘴320时,喷胶嘴320向电池片喷射导电银胶。
[0069]
关于中间移动机构10,包括驱动电机、丝杠结构以及吸附机械手(吸附机械手包括吸嘴),驱动电机通过丝杠结构与吸附机械手相连接,当驱动电机启动时,能通过丝杠结构带动吸附机械手沿水平方向移动,使得将点胶移动载台4上的电池片移放至焊接机构的焊接皮带结构5上;吸附机械手的结构可以同时吸附两个电池片。
[0070]
关于焊接机构,具体结构如下:焊接机构还包括第四支撑架、焊接皮带结构5以及焊灯结构6,焊接皮带结构5和焊灯结构6与第四支撑架相连接;焊接皮带结构5上形成有电池片放置区510、预热区520、焊接区530以及缓降温区540,焊灯结构6设置在焊接区的上方,汇流条拉出切断机构8能将汇流条移动至焊接区上。由于电池串的前后两端也需要焊接上汇流条,所以,增设了汇流条拉出切断机构8。电池片放置区510的温度控制在50℃~60℃之间,预热区520的温度控制在100℃左右,焊接区530的温度控制在150℃左右,焊灯结构6设置在焊接区530的上方且焊灯结构6用于加热电池片以及汇流条上的胶体,在缓降温区540,
逐渐实现电池片与汇流条以及相邻的两个电池片固化连接。具体过程如下:利用汇流条拉出切断机构8,在放置区510上先放置一个汇流条(汇流条上涂有胶体),然后中间移动机构10将其中一个电池片(称为第一电池片)放置在放置区510并与汇流条存在叠加区域,然后焊接皮带结构5动作使得焊接皮带550转动一定距离,中间移动机构10的吸附机械手也沿水平方向移动一段距离,使得中间移动机构10上的另一电池片(称为第二电池片)叠放在第一电池片上,第一电池片与第二电池片相接触的区域上涂有导电银胶;然后中间移动机构10再向复位方向移动,从点胶移动载台4上再吸附两个电池片(可称为第三电池片和第四电池片),将第三电池片和第四电池片按照第一电池片和第二电池片的方式依次放置在预热区520,使得第三电池片叠放在第二电池片上,第四电池片叠放在第三电池片上。根据具体的实际需求,制作不同长度的电池片,比如,当需要四个电池片即可满足电池串的要求,在中间移动机构10将第四电池片放置在预热区520后,汇流条拉出切断机构8动作,将回流条放置在预热区520且与第四电池片相叠加,在经过焊灯结构6焊接后形成一个电池串。
[0071]
关于焊接皮带结构5,焊接皮带结构5包括焊接皮带550,焊接皮带550的材质为铁氟龙耐高温材质,焊接皮带550上形成电池片传送面,电池传送面的下方设置加热装置,加热装置可以为电加热管,电加热管沿焊接皮带结构5的长度方向间隔分布,电加热管支撑在焊接皮带结构5的架体上,通过控制加热管的温度,使得电池片传送面上依次形成有电池片放置区510、预热区520、焊接区530以及缓降温区540,且电池片放置区510、预热区520以及焊接区530的温度逐渐增大。参见图8,焊接皮带550套在焊接皮带结构5的支撑辊上,其中一个支撑辊为主动辊,主动辊连接支撑辊驱动电机560。另外,为了更好地实现散热,焊接皮带550上分布有散热孔,散热孔便于实现电加热管产生的热量传送至电池片传送面上方。
[0072]
关于焊灯结构6,包括焊灯支撑架体610、加热灯结构620、焊灯驱动气缸630、压针结构640以及压针驱动气缸650,焊灯驱动气缸630和压针驱动气缸650连接在焊灯支撑架体610上,压针结构640位于加热灯结构620的下方侧,加热灯结构620与焊灯驱动气缸630相连接且焊灯驱动气缸630能带动加热灯结构620上下移动,压针结构640与压针驱动气缸650相连接且压针驱动气缸650能带动压针结构640上下移动。当焊接皮带550停止动作,焊灯结构6开始动作,对位于焊接区530的电池片进行加热处理。具体过程如下:压针结构640在压针驱动气缸650的带动下向下移动直至压住电池片,加热灯结构620在焊灯驱动气缸630的带动下也会下移一段距离,同时,加热灯结构620启动,实现对电池片以及导流条上的胶体加热,然后压针结构640在压针驱动气缸650的带动下向上移动至复位位置,加热灯结构620在焊灯驱动气缸630的带动下移动至复位位置,电池片在焊接皮带550的带动下向远离焊灯结构6的方向移动,胶体在逐渐冷却的过程中实现电池片的叠加黏贴、实现导流条与电池片的连接。
[0073]
关于压针驱动气缸650与压针结构640的连接,具体如下:参见图10和图11,压针驱动气缸650竖直设置且压针驱动气缸650的伸缩轴朝上,压针驱动气缸650通过压针连接结构与压针结构640相连接,焊灯支撑架体610相对的两侧面设置滑轨,压针连接结构上设置滑槽,压针连接结构与焊灯支撑架体610滑动连接且滑轨与压针连接结构上对应的滑槽相配合。当压针驱动气缸650的伸缩轴向上伸出时,压针连接结构与压针结构640向上移动;当压针驱动气缸650的伸缩轴向下伸回时,压针连接结构与压针结构640向下移动。关于压针结构640,包括小压针支撑板结构642和小压针641,小压针支撑板结构642与压针连接结构
相连接,小压针641分布在小压针支撑板结构642上。
[0074]
关于焊灯驱动气缸630与加热灯结构620的连接,具体如下:参见图9,焊灯驱动气缸630竖直设置且焊灯驱动气缸630的伸缩轴朝下,焊灯驱动气缸630通过焊灯连接结构与加热灯结构620相连接,焊灯支撑架体610相对的两侧面设置滑轨,焊灯连接结构与焊灯支撑架体610滑动连接且滑轨与焊灯连接结构上对应的滑槽相配合。当焊灯驱动气缸630的伸缩轴向下伸出时,焊灯连接结构与加热灯结构620向下移动;当焊灯驱动气缸630的伸缩轴向上缩回时,焊灯连接结构与加热灯结构620向上移动。关于加热灯结构620,包括若干加热管,且加热灯结构620还包括散热风扇。
[0075]
关于汇流条拉出切断机构8,具体结构如下:汇流条拉出切断机构8包括汇流条支撑架810、助焊剂容纳结构820、打孔结构830、剪切结构840、拉取结构850以及汇流条移动结构860,其中,助焊剂容纳结构820、打孔结构830、剪切结构840以及拉取结构850连接在汇流条支撑架810上,汇流条盘870连接在汇流条支撑架810上,汇流条盘870上的汇流条能依次经过助焊剂容纳结构820、打孔结构830并引向剪切结构840,当剪切结构840处于复位状态时,拉取结构850能拉住汇流条的端部并能带动汇流条向远离剪切结构840的方向移动,剪切结构840用以剪切经过其的汇流条,汇流条移动结构860能将剪断后汇流条移向焊接皮带结构5。参见图12,示意出了汇流条拉出切断机构,汇流条盘870上缠绕着汇流条,汇流条的自由端经过助焊剂容纳结构820和打孔结构830引向剪切结构840,当剪切结构840处于复位状态时,拉取结构850能拉住汇流条的端部并能带动汇流条向远离剪切结构840的方向移动,移动到设定距离后,拉取结构850停止移动,剪切结构840动作以剪断经过其的汇流条。拉取结构松开夹取的汇流条,拉取结构向复位的方向移动,剪切结构840复位,拉取结构复位后夹取汇流条的端部,汇流条移动结构860能将剪断后汇流条移向焊接皮带结构5。当汇流条经过助焊剂容纳结构820时,助焊剂容纳结构820内的助焊剂涂覆在经过起的汇流条上,打孔结构830用以对汇流条进行打孔。
[0076]
关于汇流条从汇流条盘870引向助焊剂容纳结构820,具体说明如下:参见图12,汇流条盘870为两个,其图中示意出了多个支撑滚轮880,汇流条盘870上的汇流条绕过多个支撑滚轮880后引向助焊剂容纳结构820。
[0077]
关于助焊剂容纳结构820,具体结构如下:参见图13,助焊剂容纳结构820包括焊剂盒821和海绵件,海绵件设置在焊剂盒821内,焊剂盒821支撑在焊剂盒支架上,焊剂盒821上形成贯穿孔822,参见图13,示意出了汇流条穿过贯穿孔822,焊剂盒821的顶部设置注液孔823,注液孔823与供焊剂液装置相连接,供焊剂液装置通过注液孔823向焊剂盒821内的海绵件提供焊剂夜,汇流条通过贯穿孔822穿过焊剂盒821,且汇流条经过焊剂盒821时与吸附有液态助焊剂的海绵件相接触,使得助焊剂能附在经过焊剂盒821的汇流条上。
[0078]
关于打孔结构830,具体结构如下:参见图14,打孔结构830包括打孔驱动气缸831、第一动模板832、第二动模板833、定模板834和打孔块,定模板834支撑在打孔支架上,定模板834、第二动模板833以及第一动模板832沿高度方向上依次设置,打孔驱动气缸831与第一动模板832相连接,第一动模板832与打孔块固定连接且打孔块插入第二动模板833,第二动模板833与定模板834之间以及第一动模板832与第二动模板833之间设置有弹性部件以及竖向导向柱835,当打孔驱动气缸831带动第一动模板832向下移动时,第二动模板833能向下移动且打孔块能对夹在定模板834和第二动模板833之间的汇流条打孔。参见图14,竖
向导向柱835固定在定模板834上,竖向导向柱835穿过第一动模板832和第二动模板833,且第一动模板832和第二动模板833能向对于竖向导向柱835向下运动,竖向导向柱835上套设有弹性部件(弹簧),当打孔驱动气缸831带动第一动模板832向下移动时,第二动模板833能向下移动且打孔块能对夹在定模板834和第二动模板833之间的汇流条打孔。当打孔驱动气缸831复位后,第一动模板832能在弹性部件的作用下复位。
[0079]
关于剪切结构840的具体结构,可以如下:参见图15,剪切结构840包括上剪切刀841、下剪切刀842、上剪切驱动气缸843以及下剪切驱动气缸844,上剪切驱动气缸843连接上剪切刀841,下剪切驱动气缸844连接下剪切刀842,上剪切驱动气缸843以及下剪切驱动气缸844连接在剪切支架上,通过上剪切驱动气缸843带动上剪切刀841向下移动以及通过下剪切驱动气缸844带动下剪切刀842向上移动以用于剪切经过上剪切刀841和下剪切刀842的汇流条。参见图15,示意出了剪切结构840处于剪切状态,上剪切刀841和下剪切刀842相配合以剪切经过剪切结构840的汇流条。当剪切完成后,通过上剪切驱动气缸843带动上剪切刀841向上移动,下剪切驱动气缸844带动下剪切刀842向下移动,实现上剪切刀841和下剪切刀842的复位。
[0080]
关于拉取结构850的具体结构,可以如下:参见图16,拉取结构850包括夹手结构和夹手驱动结构851,夹手结构为两个且夹手结构与夹手驱动结构851相连接,夹手结构用以夹住、放开汇流条的自由端,夹手驱动结构851能带动夹手结构向远离剪切结构4的方向移动。参见图17,示意出了两个夹手结构,两个夹手结构分别对应两个汇流条盘870,两个夹手结构与夹手驱动结构851相连接,夹手驱动结构851可以是电机与丝杠机构,带动夹手结构沿水平方向移动,图6中也示意出了放料载台852,当汇流条剪切完成后,夹手结构松开夹取的汇流条,夹手结构在夹手驱动结构851驱动下向复位的方向移动,剪切结构4复位,夹手结构复位后夹取汇流条的端部。放料载台852上的汇流条,在汇流条移动结构860的作用下,被吸取放置在焊接皮带结构5上。关于夹手驱动结构851,包括电机、丝杠以及滑块结构,滑块结构与夹手结构相连接,通过电机动作,带动丝杠转动,以带动滑块结构沿水平方向移动。参见图24,示意出了夹手驱动结构851和放料载台852横跨在焊接皮带结构5上,参见图8,示意出了汇流条移动结构860相对于放料载台852以及焊接皮带结构5的位置。
[0081]
关于夹手结构,具体结构如下:参见图17,夹手结构包括夹手气缸853、中间连接件854、三角形板件855以及底部支撑结构856,夹手气缸853的伸缩轴与中间连接件854的一端转动连接、中间连接件854的另一端与三角形板件855的第一角端部位转动连接,三角形板件855的第二角端部位与底部支撑结构856转动连接,底部支撑结构856与夹手气缸853的壳体相连接,三角形板件855的第三角端部位设置夹取板857,夹手气缸853的伸缩轴向外伸出时能带动三角形板件855发生转动。参见图17,当夹手气缸853的伸缩轴向外伸出时,夹取板857向靠近底部支撑结构856的方向转动,使得汇流条51的端部能夹在夹取板857和底部支撑结构856之间,当夹手气缸853的伸缩轴缩回缸内时,夹取板857向远离底部支撑结构856的方向转动,夹取板857和底部支撑结构856松开汇流条51的端部。
[0082]
关于汇流条移动结构860,具体结构如下,参见图8,汇流条移动结构860包括吸嘴、气缸、丝杠机构以及电机,一排吸嘴与气缸的伸缩轴相连接,通过气缸可带动吸嘴上下移动,电机与丝杠机构相连接,丝杠机构的丝杆与电机相连接,丝杠机构的滑块结构与气缸相连接,通过电机和丝杠机构实现吸嘴和气缸沿水平方向上的移动。通过汇流条移动结构
860,将放料载台852上的汇流条移向焊接皮带结构5上的放置区510。
[0083]
关于平移翻转机构9,具体如下:平移翻转机构9包括平移传送带结构901、平移结构和翻转结构,其中,平移传送带结构901与焊接机构相邻,平移传送带结构901设置在焊接皮带结构5的一侧,焊接皮带结构5上的电池串能移向平移传送带结构901,翻转结构设置在平移结构的一侧且平移结构用以将焊接皮带结构5上的电池串放置在翻转结构上;平移结构包括平移吸嘴980和平移驱动结构,平移吸嘴980与平移驱动结构相连接,平移驱动结构能带动平移吸嘴980沿水平以及竖直方向移动,平移吸嘴980设置在平移传送带结构901上方;翻转结构包括翻转吸嘴990和翻转驱动结构,翻转吸嘴990与翻转驱动结构相连接,翻转驱动结构能带动翻转吸嘴990以及设置在翻转吸嘴990上的电池串翻转。
[0084]
关于平移驱动结构,具体如下:参见图18
‑
20,移驱动结构包括平移横向梁930、平移竖向气缸920、平移驱动电机940和丝杠机构,平移驱动电机940支撑在平移驱动结构的平移架体上,平移驱动电机940与丝杠机构相连接,丝杠机构的滑块结构与平移竖向气缸920相连接,平移竖向气缸920的伸缩轴与平移横向梁930相连接,平移横向梁930的下侧面上设置平移吸嘴980,平移吸嘴980沿平移横向梁930的长度方向间隔分布在平移横向梁930上。当平移驱动电机940动作时,带动丝杠转动,进而使得滑块结构水平方向移动,实现带动平移竖向气缸920以及平移横向梁930沿水平方向移动;平移竖向气缸920的伸缩轴与平移横向梁930相连接,平移竖向气缸920动作时能带动平移横向梁930上、下移动。平移横向梁930上设置连接杆,连接杆沿平移横向梁930的长度方向间隔分布在平移横向梁930上,且连接杆的长度延伸方向与平移横向梁930的长度延伸方向垂直,每个连接杆上均设置平移吸嘴980,每个连接杆上设置一个以上平移吸嘴980,当每个连接杆上设置两个平移吸嘴980时,平移吸嘴980沿连接杆的长度延伸方向间隔分布。
[0085]
当将平移传送带结构901上的电池串移向翻转驱动结构时,平移竖向气缸920伸缩轴伸出,平移横向梁930向下移动,平移吸嘴980吸附平移传送带结构901上的电池串,平移竖向气缸920伸缩轴缩回,平移横向梁930向上移动,移动到位后,平移驱动电机940与丝杠机构带动平移横向梁930沿水平方向移动,移动到位后,平移竖向气缸920伸缩轴伸出,平移横向梁930向下移动,平移吸嘴980释放电池串,电池串落在翻转驱动结构上。
[0086]
关于翻转驱动结构,具体如下:参见图19
‑
20,翻转驱动结构包括翻转梁950、翻转驱动电机960以及传动机构,翻转梁950的两端分别支撑在翻转结构的翻转架体上,且翻转梁950与翻转架体转动连接,翻转驱动电机960通过传动机构与翻转梁950的一端相连接,翻转驱动电机960通过传动机构能带动翻转梁950转动。参见图20,示意出了电池片位于翻转吸嘴990上;参见图20,示意出了翻转驱动电机960,传动机构可以为齿轮传动结构或为皮带轮传动结构,当翻转驱动电机960动作时,通过齿轮传动结构或为皮带轮传动结构带动翻转梁950的一端转动;参见图19和图20,为翻转梁950的复位状态,当检测到翻转吸嘴990上有电池串时,翻转驱动电机960启动,带动翻转梁950逆时针转动,翻转吸嘴990开始向上转动然后向下转动,转动近180
°
时,翻转驱动电机960停止转动,翻转梁950的位置不动,翻转吸嘴990解除对电池串的吸附使得电池串落在出料料盘上。然后翻转驱动电机960顺时针转动,使得翻转吸嘴990的位置复位。
[0087]
实施例2:
[0088]
与实施例1不同的是,串焊机不包括汇流条拉出切断机构8,取而代之的是汇流条
移放结构7,汇流条移放结构7用以向焊接结构的焊接皮带结构5放置汇流条。
[0089]
参见图25,示意出了汇流条移放结构7,汇流条移放结构7包括汇流支架、汇流条吸附装置、汇流条驱动装置以及汇流条放置台,汇流条吸附装置通过汇流条驱动装置连接在汇流支架上且汇流条驱动装置能带动汇流条吸附装置移动,汇流条放置台跨接在焊接皮带结构5上,汇流条吸附装置用以吸附放置在汇流条放置台上汇流条,且汇流条放置台上设置有胶盒。
[0090]
关于汇流条驱动装置,参见图26,汇流条驱动装置包括气缸、丝杠机构以及电机,汇流条吸附装置(汇流条吸附装置包括吸嘴)与气缸的伸缩轴相连接,通过气缸可带动吸嘴上下移动,电机与丝杠机构相连接,丝杠机构的丝杆与电机相连接,丝杠机构的滑块结构与气缸相连接,通过电机和丝杠机构实现吸嘴和气缸沿水平方向上的移动。通过汇流条驱动装置,将汇流条放置台上的汇流条移向焊接皮带结构5上的放置区510。具体操作如下:气缸带动吸嘴向下移动,吸附汇流条放置台上的汇流条,然后气缸带动吸嘴和汇流条向上移动,通过丝杠机构与电机带动气缸沿水平方向移动,移动到汇流条放置台胶盒的正上方时,电机停止动作,气缸带动汇流条向下移动,使得汇流条与胶盒内的胶体接触,然后气缸带动汇流条向上移动,移动到位后,丝杠机构与电机带动气缸沿水平方向移动,使得汇流条移动至焊接皮带结构5放置区510上方,然后启动动作,带动汇流条向下移动,移动到位后,气缸停止动作,吸嘴接触对汇流条的吸附作用,使得汇流条落在放置区510。
[0091]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。