1.本发明装甲车辆主动防御领域,具体涉及用于特种车辆的高速小目标探测设备安装方法,用于解决特种车辆全方位主动防御问题。
背景技术:
2.随着技术的发展,特种车辆的装甲厚度越来越大,装甲配方、质量不断改善,防护力越来越强。但20世纪80年代以来,反装甲武器的技术发展实际上要快过装甲技术的发展,特种车辆及装甲战斗车辆原有的优势正在削弱。仅通过增加装甲厚度来提高防护能力的方法已接近极限,为解决装甲车辆的生存能力问题,主动防御技术应运而生,为特种车辆的防护体系提供了一个新的研发突破口和有效的解决途径。主动防御系统,是指通过探测装置获得来袭弹药的运动特征,然后通过计算机控制对抗装置,使来袭弹药无法直接命中被防护目标的一套系统。
3.主动防御系统的核心需求是全方位、高效、主动、及时对各类高速超高速来袭物探测即高速小目标探测雷达。目前国内高速小目标探测雷达还存在着缺点和不完善之处,首先只能对各国现役的反特种车辆导弹、反特种车辆火箭筒进行拦截,对超高速飞行的弹药,如特种车辆炮发射的脱壳穿甲弹,主动防御系统既无法探测和发现,也无法拦截。特种车辆主动防御系统的发展方向是扩大告警范围、提高探测器件的精度和相应速率。
4.随着雷达技术的成熟和发展,高速小目标探测雷达的探测速度、探测范围、检测精度和反应速率等性能也在不断提升。为了保证高速小目标探测雷达有效的覆盖范围,基于高速小目标探测雷达特性以及特种车辆装甲车作战环境,提出的一种安全可靠的安装方法事十分必要的。
技术实现要素:
5.本发明的目的在于根据高速小目标探测雷达的特性和应用需求,为保证高速小目标探测雷达安全可靠的运行和方位维360
°
无死角探测高速小目标,提出了一种高速小目标探测设备安装方法。
6.为实现上述目的,达到上述技术效果,本发明提供了一种用于特种车辆的高速小目标探测设备安装方法,其特征在于包括,
7.步骤1,根据单部高速小目标探测雷达的方位覆盖角度α,90
°
<α≤120
°
,确定360
°
全方位覆盖至少需要3部或者4部高速小目标探测雷达;
8.步骤2,为降低安装时对精度的要求,增加1部高速小目标探测雷达,使高速小目标探测雷达之间的方位覆盖区域能有余量进行重叠;
9.步骤3,将高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测雷达之间设置有间隔距离,但是方位覆盖区域两两重叠,从而实现特种车辆360
°
全方位覆盖。
10.进一步的,步骤1中,所述的单部高速小目标探测雷达的方位覆盖角度α=120
°
,确
定360
°
全方位覆盖至少需要3部高速小目标探测雷达,步骤2中,增加1部高速小目标探测雷达,使4部高速小目标探测雷达之间的方位覆盖区域能有余量进行重叠。
11.进一步的,步骤3中,高速小目标探测雷达两两之间的法线夹角相等。
12.进一步的,步骤3中,高速小目标探测雷达两两之间的法线夹角相等,为90
°
,实现方位维360
°
覆盖。
13.进一步的,步骤3中,4部高速小目标探测雷达安装于特种车辆炮台的四角。
14.本发明还提供了一种用于特种车辆的高速小目标探测设备,其特征在于:包括4部或5部高速小目标探测雷达,单部高速小目标探测雷达的方位覆盖角度α,90
°
<α≤120
°
,高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测设备之间设置有间隔距离,但是方位覆盖区域两两重叠,从而实现特种车辆360
°
全方位覆盖。
15.进一步的,所述高速小目标探测雷达的方位覆盖角度α=120
°
,数量是4部,高速小目标探测雷达安装于特种车辆炮台的四个角。
16.进一步的,每部高速小目标探测雷达与炮塔共形,高速小目标探测雷达的背板是一平面板,炮塔的切角平面设置有安装板,雷达背板与安装板共形,通过连接件将雷达安装于炮塔的四个角的安装板,高速小目标探测雷达的线缆通过其其背板的线缆出口,再经过安装板上线缆入口直通特种车辆内部。
17.有益效果:
18.本发明的用于特种车辆的高速小目标探测设备及安装方法,通过增加设备和设置重叠探测区域的方式,提高了高速小目标探测设备的设计安装效率,避免产生探测盲区,提高对来袭高速导弹的检测概率。进一步的,本发明采用与特种测量共形设计方式,增加雷达的环境适应性,可使雷达与特种车辆振动保持一致,减少新的谐振频率的引入,增大雷达散热面积,同时线缆出口直通特种车辆内部,减小雷达线缆长度,避免线缆外露,增加了雷达密封性和信号传输的可靠性,有助于延长雷达寿命。
附图说明:
19.图1是本发明高速小目标探测雷达的原理示意图;
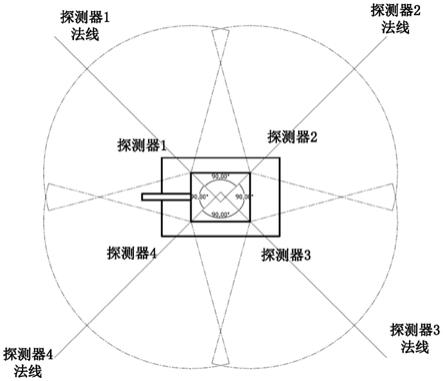
20.图2是本发明高速小目标探测设备安装方法的原理示意图;
21.图3是本发明高速小目标探测设备在炮台四角安装位置示意图。
22.图4是本发明高速小目标探测设备在炮台四角安装原理示意图。
具体实施方式:
23.为保证特种车辆对任意方位来袭的高速小目标,例如智能炮弹,进行快速、精准探,并联动主动防御系统实施对来袭物的有效防御,从而提高特种车辆的战场生存能力,本发明提出了一种安全可靠的高速小目标探测设备及其安装方法。
24.本发明的用于特种车辆的高速小目标探测设备安装方法,包括:
25.步骤1,根据单部高速小目标探测雷达的方位覆盖角度α,90
°
<α≤120
°
,确定360
°
全方位覆盖至少需要3部或者4部高速小目标探测雷达;
26.步骤2,为降低安装时对精度的要求,增加1部高速小目标探测雷达,使高速小目标探测雷达之间的方位覆盖区域能有余量进行重叠;
27.步骤3,将高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测雷达之间设置有间隔距离,但是方位覆盖区域两两重叠,从而实现特种车辆360
°
全方位覆盖。
28.本发明还提供了一种用于特种车辆的高速小目标探测设备,其特征在于:包括4部或5部高速小目标探测雷达,单部高速小目标探测雷达的方位覆盖角度α,90
°
<α≤120
°
,高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测设备之间设置有间隔距离,但是方位覆盖区域两两重叠,从而实现特种车辆360
°
全方位覆盖。
29.实施例1
30.如图1所示,以半圆柱型雷达为例,单部高速小目标探测雷达可覆盖的最大范围为方位维120
°
,要实现方位维360
°
无死角探测,需要3部雷达,但是如果只用3部雷达,雷达安装时的精度需要很高,在实际运用中容易漏掉雷达与雷达最大探测范围交界处的高速目标。所以通过本发明的方法增加1部高速小目标探测雷达,采用4部高速小目标探测雷达,实现覆盖360
°
无死角覆盖。
31.如图2和图3所示,四部雷达安装在特种车辆炮塔的四角,雷达与雷达之间具有一定的距离,可以减少雷达之间相互干扰,同时又可以保证四部雷达对全方位的覆盖,其中对于坦/装甲车前后左右四个方向的多雷达覆盖,提高对来袭高速导弹的检测概率。探测雷达的法线互为90
°
,且法线指向向外,保证前后左右的大部分区域都有两个部雷达波束覆盖。
32.虽然在本发明的优先实施例中,高速小目标探测雷达两两之间的法线夹角相等,但本领域技术人员在本发明思想的启示下,还可以选择法线夹角不相等的安装位置方案,只需位于四周,雷达之间设置间隔距离,方位覆盖区域两两重叠,即可实现特种车辆360
°
全方位覆盖。
33.如图3和图4所示,本发明具体实施例中,每部高速小目标探测雷达还与炮塔共形,雷达背板是一平面,炮塔的切角平面设置有安装板,雷达背板与安装板共形,通过连接件,例如螺钉、铆钉等,将雷达安装于炮塔的四个角的安装板,高速小目标探测雷达的线缆通过其背板的线缆出口,再经过安装板上线缆入口直通特种车辆内部。
34.特种车辆作战在复杂的地形区域,行进道路大多不平坦,温度环境极端,除了探测雷达本身的振动要求和高低温适应性以外,对于探测雷达的安装方式提出了很高的要求。为保证探测雷达能稳定有效的运行,采用在特种车辆炮台一体化设计,炮台设计时需预留雷达安装位置,雷达直接与炮塔固定,实现一体化一体化设计,可以增加雷达的环境适应性,可使雷达与特种车辆振动保持一致,减少新的谐振频率的引入,增大雷达散热面积,同时线缆出口直通特种车辆内部,减小雷达线缆长度,避免线缆外露,增加了雷达密封性和信号传输的可靠性,有助于延长雷达寿命。
35.实施例2
36.还是图1所示的半圆柱型雷达为例,单部高速小目标探测雷达可覆盖的最大范围为方位维92
°
,要实现方位维360
°
无死角探测,需要4部雷达,但是如果只用4部雷达,仍然对雷达安装时的精度需要很高,所以通过本发明的方法增加1部高速小目标探测雷达,采用5部高速小目标探测雷达,雷达的法线互为72
°
,且法线指向向外,保证前后左右的大部分区域都有两个部雷达波束覆盖。实现覆盖360
°
无死角覆盖。其它与实施例1中的方式相同或相似,不再重复。
37.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。