技术特征:
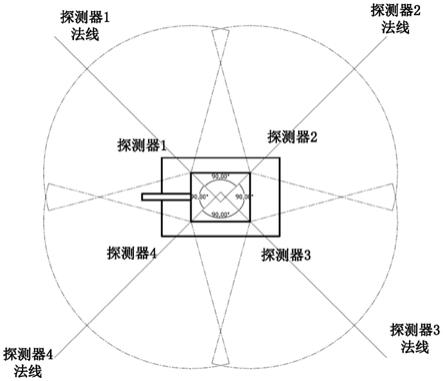
1.一种用于特种车辆的高速小目标探测设备安装方法,其特征在于包括:步骤1,根据单部高速小目标探测雷达的方位覆盖角度α,90
°
<α≤120
°
,确定360
°
全方位覆盖至少需要3部或者4部高速小目标探测雷达;步骤2,为降低安装时对精度的要求,增加1部高速小目标探测雷达,使高速小目标探测雷达之间的方位覆盖区域能有余量进行重叠;步骤3,将高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测雷达之间设置有间隔距离,但是方位覆盖区域两两重叠,从而实现特种车辆360
°
全方位覆盖。2.根据权利要求1所述的安装方法,其特征在于:步骤1中,所述的单部高速小目标探测雷达的方位覆盖角度α=120
°
,确定360
°
全方位覆盖至少需要3部高速小目标探测雷达,步骤2中,增加1部高速小目标探测雷达,使4部高速小目标探测雷达之间的方位覆盖区域能有余量进行重叠。3.根据权利要求1所述的安装方法,其特征在于:步骤3中,高速小目标探测雷达两两之间的法线夹角相等。4.根据权利要求2所述的安装方法,其特征在于:步骤3中,高速小目标探测雷达两两之间的法线夹角相等,为90
°
,实现方位维360
°
覆盖。5.根据权利要求2所述的安装方法,其特征在于:步骤3中,4部高速小目标探测雷达安装于特种车辆炮台的四角。6.一种用于特种车辆的高速小目标探测设备,其特征在于:包括4部或5部高速小目标探测雷达,单部高速小目标探测雷达的方位覆盖角度α,90
°
<α≤120
°
,高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测设备之间设置有间隔距离,但是方位覆盖区域两两重叠,从而实现特种车辆360
°
全方位覆盖。7.如权利要求6用于特种车辆的高速小目标探测设备,其特征在于,所述高速小目标探测雷达的方位覆盖角度α=120
°
,数量是4部,高速小目标探测雷达安装于特种车辆炮台的四个角。8.如权利要求7用于特种车辆的高速小目标探测设备,其特征在于,每部高速小目标探测雷达与炮塔共形,高速小目标探测雷达的背板是一平面板,炮塔的切角平面设置有安装板,雷达背板与安装板共形,通过连接件将雷达安装于炮塔的四个角的安装板,高速小目标探测雷达的线缆通过其其背板的线缆出口,再经过安装板上线缆入口直通特种车辆内部。
技术总结
本发明公开了用于特种车辆的高速小目标探测设备及安装方法。本发明的设备包括4部或5部高速小目标探测雷达,高速小目标探测雷达安装于特种车辆炮台的四周,为避免相互干扰,高速小目标探测设备之间设置有间隔距离,但是方位覆盖区域两两重叠,实现特种车辆360
技术研发人员:许欣宇 杨俊彪 柴丁 任丽军 师雪瑞
受保护的技术使用者:山西宇翔信息技术有限公司
技术研发日:2021.08.30
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。