1.本发明涉及物料智能化输送领域,特别是一种智能对接系统及方法。
背景技术:
2.在生产车间内,需要加工的工件在各个工位之间进行转运,例如用于生产芯片的晶圆、用于生产太阳能电池的基板,用于生产电路板的覆铜板等,现有的方式是采用人工货架车,需要人为的将物料搬至货架车上,再通过货架车送至下一个工位处,最后还需要通过人工将物料(一般为块状物料或板状组件)放置转运工位生产线上,劳动强度高,效率低。中国专利文献cn 111017530 a记载了一种用于光伏生产线的对接运输装置及对接运输方法,能够实现物料从生产线到货架的自动转运。但是货架的输送还需人工参与。中国专利文献cn 110482442 a记载了一种超薄举升全向agv,具有车体底板,车体底板底部四角上内嵌装有万向轮,车体底板的底面中部前后两侧位置上内嵌装有两套差速驱动单元;车体底板上面装有凸轮举升机构;所述举升框架为矩形框架,所述导向机构包括有导向柱和导向轮,其中导向柱设置在车体底板上面,导向轮固定安装在举升框架的左右两侧中间部位,导向轮沿着导向柱上下滚动;该agv小车能够以超低高度潜入料车底部进行托举搬运料车,行动灵活方便,搬运效率高。但是该方式难以确保搬运料车的精确定位,即当需要将搬运料车与其他设备进行精确对接时,难以保证精确的定位。而且当搬运料车的自重较重时,托举的操作变的不可行,且能耗较高,导致agv小车的磨损较大,且能耗较高。
技术实现要素:
3.本发明所要解决的技术问题是提供一种智能对接系统及方法,能够实现对接料车与对接工位的自动对接,且在对接料车上无需设置额外的动力装置。
4.为解决上述技术问题,本发明所采用的技术方案是:一种智能对接系统,它包括对接料车、对接驳台和智能小车;对接料车上设有输送带,用于输送工件,对接料车上设有定位杆,对接料车底部设有用于与智能小车连接的对接平台,对接料车底部设有用于容纳智能小车进入的智能小车,对接料车的底部设有万向轮;对接驳台上设有锁定装置,锁定装置用于将对接料车与对接驳台锁定在一起并释放,对接驳台用于设置在对接工位,以在对接工位和对接料车之间输送工件;智能小车的底部设有万向轮和差动行走轮,智能小车顶部设有升降平台,升降平台用于与对接平台连接并释放,智能小车用于驱动对接料车与对接驳台对接和释放。
5.优选的方案中,在升降平台上设有多个定位销,在对接平台的底部设有定位销孔,在对接时,定位销相对应的插入到定位销孔。
6.优选的方案中,所述的定位销顶部为圆头或尖头;定位销孔的底部设有锥形段。
7.优选的方案中,在对接料车的底部还设有用于辅助智能小车定位的第一定位挡板
和第二定位挡板,第一定位挡板和第二定位挡板分别用于定位智能小车的两个相邻端面,从而使智能小车的定位销和对接平台的定位销孔对齐。
8.优选的方案中,在智能小车的前部或顶部还设有摄像头,用于识别引导图像和定位图像。
9.优选的方案中,在智能小车的顶部还设有升降开关,升降开关用于检测定位销与定位销孔的可靠连接。
10.优选的方案中,对接料车上还设有从动轮,从动轮与输送带连接,并驱动输送带转动,从动轮用于与对接驳台上的主动轮啮合连接,以通过主动轮驱动输送带转动。
11.优选的方案中,在对接驳台上固设有输送电机,输送电机与主动轮连接,以驱动主动轮旋转,当对接料车被锁定装置锁定时,主动轮与对接料车上的从动轮啮合连接;在对接料车上设有定位杆,定位杆上设有定位块,定位块的自由端较窄,根部较宽;在对接驳台上设有定位槽,定位槽开口处较宽,底部较窄,当对接料车被锁定装置锁定时,定位块被引导进入到定位槽内;在对接驳台还设有由固定缸推送往复运动的固定块,固定块上设有固定挡片,固定挡片的底部与固定缸的活塞杆铰接,固固定挡片的底部还设有配重块,固定挡片底部还固设有与固定挡片相对滑动的垫块;当固定缸的活塞杆伸出,固定挡片在配重块的作用下成平直状态,以供对接料车的定位杆进入,当固定缸的活塞杆缩回,固定挡片在配重块和垫块的作用下竖直,将定位杆锁定。
12.一种采用上述的智能对接系统的对接方法,包括以下步骤:s1、智能小车根据引导进入到对接料车下方,到位后,升降平台升起,与对接料车连接;s2、智能小车牵引对接料车至对接驳台,对接驳台上的锁定装置动作,将对接料车锁定到与对接驳台进行对接,对接驳台驱动对接料车的输送带;s3、对接工位通过对接驳台将工件输送至对接料车;s4、智能小车与对接料车连接,对接驳台松开锁定装置,智能小车牵引对接料车至预设位置;s5、智能小车与对接料车脱开;通过以上步骤,实现无动力的对接料车与对接工位的对接,并完成工件的装卸。
13.优选的方案中,所述的智能小车根据地面的引导运行至对接料车底部;在对接料车的底部设有编码图,智能小车扫描编码图并辅助定位;或者对接料车的底部设有编码图,智能小车扫描编码图并以第一定位挡板和第二定位挡板辅助定位。
14.本发明提供了一种智能对接系统及方法,通过将智能小车与对接料车进行对接的方案,能够以智能小车进一步驱动对接料车与对接驳台进行对接,进而与对接工位实现对接,接收或发送工件,减少了人工的参与,也减少了出错的几率。智能小车能够对厂区内的道路自动识别,并对对接料车的路径进行规划。采用连接驱动的方式,而非整体托举的方式,大幅降低了智能小车的能耗和适应性。采用辅助定位的结构和方法,能够提高智能小车与对接料车对接的成功率,提高工作效率。本发明的系统和方法,能够大幅减少人工的参与,减少高洁净度生产车间的洁净压力,提高生产率,有利于提高产品品质,尤其适合芯片、
高端电子电器、精密电路板的生产。
附图说明
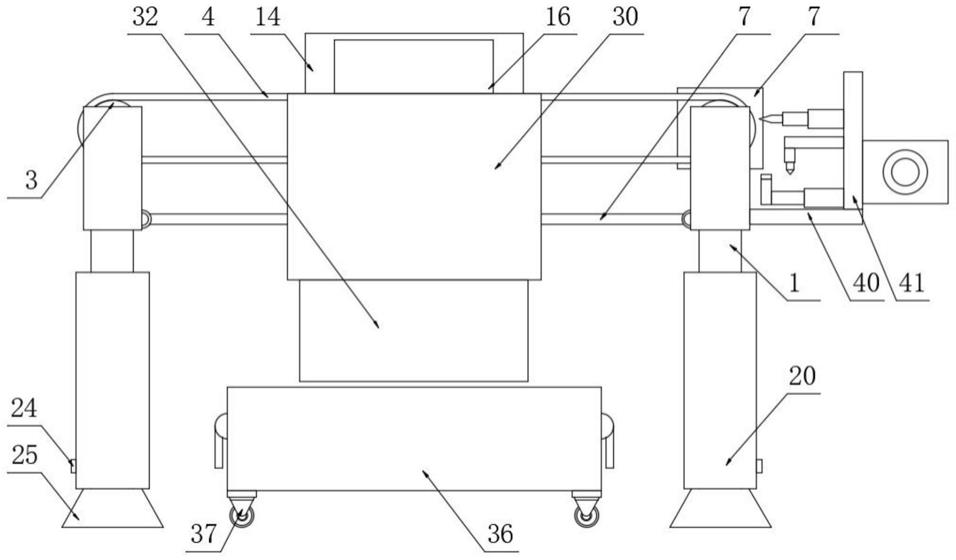
15.下面结合附图和实施例对本发明作进一步说明:图1为本发明的整体结构主视示意图。
16.图2为本发明的立体图图3为本发明中对接料车的主视图。
17.图4为本发明中对接料车和智能小车连接前的立体示意图。
18.图5为本发明中对接料车和智能小车连接前的局部结构俯视示意图。
19.图6为本发明中对接驳台的主视图。
20.图7为本发明中对接驳台的锁定装置的局部结构立体图。
21.图8为本发明中对接驳台的锁定装置与对接料车的定位杆固定连接时的局部结构立体图。
22.图9为本发明中对接驳台等待对接料车状态下的左视图。
23.图10为本发明中对接驳台的锁定装置的优选结构侧视图。
24.图中:对接料车1,对接驳台2,对接工位3,工件4,智能小车5,升降平台6,对接平台7,输送带8,从动轮9,万向轮10,定位销11,升降开关12,摄像头13,第一定位挡板14,第二定位挡板15,定位销孔16,主动轮17,定位槽18,固定块19,固定挡片191,配重块192,推杆20,固定缸21,垫块22,输送电机23,定位杆24,定位块25,挡块26,减速电机27,转轴28。
具体实施方式
25.实施例1:如图1~9中,一种智能对接系统,它包括对接料车1、对接驳台2和智能小车5;对接料车1上设有输送带8,用于输送工件4,对接料车1上设有定位杆24,对接料车1底部设有用于与智能小车5连接的对接平台7,对接料车1底部设有用于容纳智能小车5进入的智能小车5,对接料车1的底部设有万向轮;由此结构,便于由智能小车5驱动对接料车1行走,并接收或发送工件4;对接驳台2上设有锁定装置,锁定装置用于将对接料车1与对接驳台2锁定在一起并释放,对接驳台2用于设置在对接工位3,以在对接工位3和对接料车1之间输送工件4;智能小车5小车的底部设有万向轮和差动行走轮,参见中国专利文献cn 110482442 a的记载,万向轮是从动轮用于支撑和辅助行走,差动行走轮是行走轨迹互相平行的主动轮,两个差动行走轮与伺服电机连接,通过调节相对转速实现正向、反向和原地转向行走方式。
26.智能小车5顶部设有升降平台6,升降平台6采用由电机控制的凸轮、螺母丝杠机构进行升降,升降平台6用于与对接平台7连接并释放,智能小车5用于驱动对接料车1与对接驳台2对接和释放。与现有技术不同的,本发明的智能小车5小车采用的是底部对接的方式驱动对接料车1行走,由于无需承载对接料车1的重量,本发明的智能小车5所需的能耗较低。
27.优选的方案如图4、5中,在升降平台6上设有多个定位销11,在对接平台7的底部设有定位销孔16,在对接时,定位销11相对应的插入到定位销孔16。由此结构,实现智能小车5
与对接料车1之间的精确定位,以使智能小车5能够驱动对接料车1与对接驳台2精确连接。
28.优选的方案如图4、5中,所述的定位销11顶部为圆头或尖头;定位销孔16的底部设有锥形段。由此结构,能够补偿一定的定位误差。
29.优选的方案如图5中,在对接料车1的底部还设有用于辅助智能小车5定位的第一定位挡板14和第二定位挡板15,第一定位挡板14和第二定位挡板15分别用于定位智能小车5的两个相邻端面,从而使智能小车5的定位销11和对接平台7的定位销孔16对齐。通过靠紧第一定位挡板14和第二定位挡板15能够实现非常高的定位精度和非常高的效率,从而确保定位销11和定位销孔16的可靠连接。定位的方式是先定位与差动行走轮平行的定位挡板,例如图5中,先驱动智能小车5贴紧到第一定位挡板14,然后往复移动贴紧到第二定位挡板15,通过伺服电机的反馈,例如丢步反馈,判断是否贴紧到定位挡板。
30.优选的方案如图4、5中,在智能小车5的前部或/和顶部还设有摄像头,用于识别引导图像和定位图像。前部的摄像头用于识别路面的行走路径,顶部的摄像头用于识别对接料车1底部的编码图,并利用编码图的位置与摄像头的相对位置辅助定位,并根据编码图与对接料车1行走轨迹的关系,驱动对接料车1沿预设的轨迹和行为规则行走。
31.优选的方案如图3~5中,在智能小车5的顶部还设有升降开关12,升降开关12用于检测定位销11与定位销孔16的可靠连接。与现有技术不同的,本发明中的智能小车5不是定行程控制,而是采用了自适应控制,即能够在行程范围内,适应不同的对接平台7的高度。升降开关12采用巨磁阻传感器、霍尔传感器或行程开关。通过升降开关12给出一个信号,从而使智能小车5得出升降平台6与对接平台7可靠连接的判断。例如,当定位销11与定位销孔16没有连接,升降平台6走完整个升降行程均未接收到升降开关12的信号,则提示上方无对接料车1,重新退回上一个路径点再次尝试,或者发出警示,要求人工参与。当定位销11与定位销孔16因互相错开,而未可靠连接,在升降平台6举升受限的前提下,仍未接收到升降开关12的信号,则提示定位不准,发出警示,重新定位或要求人工参与。
32.优选的方案如图4、6、7中,对接料车1上还设有从动轮17,从动轮17与输送带8连接,并驱动输送带8转动,从动轮17用于与对接驳台2上的主动轮17啮合连接,以通过主动轮17驱动输送带8转动。在对接料车1中,输送带8布置为上下两层,每层设置两列。由此结构,实现对接料车1无需搭载动力系统也能够驱动工件4的输送。简化了对接料车1的结构。
33.优选的方案如图6、7中,在对接驳台2上固设有输送电机23,输送电机23与主动轮17连接,以驱动主动轮17旋转,当对接料车1被锁定装置锁定时,主动轮17与对接料车1上的从动轮17啮合连接;如图4、7、8中,在对接料车1上设有定位杆24,定位杆24上设有定位块25,定位块25的自由端较窄,根部较宽;在对接驳台2上设有定位槽18,定位槽18开口处较宽,底部较窄,当对接料车1被锁定装置锁定时,定位块25被引导进入到定位槽18内;定位槽18与定位块25用于辅助调节对接料车1的横向位置精度。
34.接驳台2还设有由固定缸21推送往复运动的固定块19,固定块19上设有固定挡片191,固定挡片191的底部与固定缸21的活塞杆铰接,固固定挡片191的底部还设有配重块192,固定挡片191底部还固设有与固定挡片191相对滑动的垫块22;当固定缸21的活塞杆伸出,固定挡片191在配重块192的作用下成平直状态,以供对接料车1的定位杆24进入,当固定缸21的活塞杆缩回,固定挡片191在配重块192和垫块22的作
用下竖直,将定位杆24锁定。
35.锁定装置的另一可选的方案如图10中,在对接驳台2与对接料车1的定位杆24相对应的位置,设有定位槽18,在定位杆24上设有与定位槽相配合的定位块25,在对接驳台2上还设有转轴28,转轴28与减速电机27连接,转轴28上设有挡块26,挡块26的另一端为配重,默认状态下挡块26处于水平状态,例如图5中挡块26的实线结构,当定位杆24进入到挡块26上方,减速电机27动作,挡块26旋转90
°
,将定位杆24锁定。采用该方案,避免了对气源的需求。减速电机27采用带有高速比减速器的小型步进电机或伺服电机,例如带有蜗轮蜗杆减速器、行星齿轮减速、摆线针轮减速器等的小型步进电机或伺服电机。
36.实施例2:一种采用上述的智能对接系统的对接方法,包括以下步骤:s1、智能小车5根据地面的引导以及无线传输的运行轨迹策略进入到对接料车1下方,到位后,升降平台6升起,定位销11插入到定位销孔16中,智能小车5与对接料车1连接;s2、智能小车5根据地面的引导牵引对接料车1至对接驳台2,对接驳台2上的锁定装置动作,将对接料车1锁定到与对接驳台2进行对接,对接驳台2的输送电机23驱动主动轮17旋转,进而驱动对接料车1的输送带8旋转;s3、对接工位3通过对接驳台2将工件4输送至对接料车1上;在输送过程中,智能小车5可以脱离去牵引其余的对接料车1,直至工件4均被输送至最开始的对接料车1上;当然的,也可以在原地等待工件4输送至对接料车1上。具体策略根据实际工况进行安排。
37.s4、智能小车5返回与对接料车1重新连接,对接驳台2松开锁定装置,智能小车5牵引对接料车1至预设位置,进行卸料或者输送至下一工序;s5、智能小车5的升降平台6降下,智能小车5与对接料车1脱开;通过以上步骤,实现无动力的对接料车1与对接工位3的对接,并完成工件4的装卸。
38.优选的方案中,所述的智能小车5根据地面的引导运行至对接料车1底部;在对接料车1的底部设有编码图,智能小车5扫描编码图并辅助定位;或者对接料车1的底部设有编码图,智能小车5扫描编码图得到当前对接料车1的运行策略,例如需要行走至哪一个对接工位3,在该对接工位3需要停留大约多少时间等信息。并以第一定位挡板14和第二定位挡板15辅助定位,第一定位挡板14和第二定位挡板15的辅助定位相比扫描编码图并辅助定位的效率更高。由以上的装置和方法,本发明能够构建出完全不需要人工参与的无人化智能生产车间,尤其适用于需要高洁净度的生产车间的产品生产线。并能够大幅降低人工成本,以及维持车间内洁净度空气的成本。
39.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本技术中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。