技术特征:
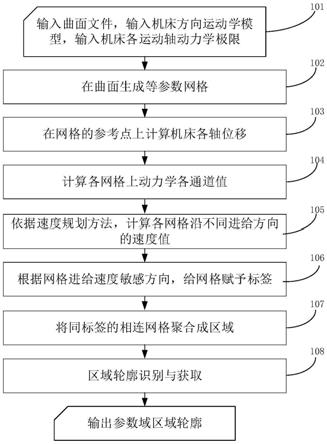
1.一种基于数控插补映射的曲面参数域自适应划分方法,其特征在于,该方法包括如下步骤:(1)输入待加工曲面surf(u,v)、机床反向运动学模型、机床各轴动力学参数,u,v为待加工曲面surf(u,v)的参数域方向。(2)在曲面参数域生成等间隔参数网格,网格单元的集合记为(3)根据机床反向运动学模型,计算刀具在第i行、j列的网格单元参考点处机床各轴的位置,记其中,x为网格单元在各参数线上的参考点,x={u
i
,u
i 1
,v
j
,v
j 1
};);所述机床反向运动学模型为将机床运动刀具终端的轨迹转化为机床各轴位移的反向运动学关系,由机床运动链决定,所述机床运动刀具终端的轨迹由刀具参考点坐标surf
ij,x
=[x,y,z]和刀具刀轴矢量t
ii,x
=[t
x
,t
y
,t
z
]组成。(4)计算网格各动力学通道值。(5)分别计算不同进给方向的进给速度通道值。(6)比较网格单元沿不同方向运动时进给速度的快慢,为网格单元标记标签,遍历网格网格单元,直到所有单元均被标记,带标签的网格记为(7)将相连的同标签网格聚合为区域;记区域为z
i
(i=1,2,3...k),则(8)提取区域的边缘网格单元,顺序连接生成区域轮廓,实现曲面参数域自适应划分。2.如权利要求1所述的方法,其特征在于,所述步骤1中,所述机床各轴动力学参数包括速度极限值v
kmax
,加速度极限值为a
kmax
,加加速度极限值为j
kmax
。;k为x、y、z、a或c,表示x轴、y轴、z轴、a轴或c轴。3.如权利要求1所述的方法,其特征在于,所述步骤2具体为:采用沿着参数域u、v两个方向的等参数线生成n
×
n的等参数网格,网格记为每个网格上有四个参考点,分别为网格各边的中点。4.如权利要求1所述的方法,其特征在于,所述步骤3包括以下子步骤:(3.1)在参考点处时刀具位置为即刀具中心点的坐标即该网格参考点坐标;(3.2)记网格参考点则surf
ij,x
=s(u
ij,x
,v
ij,x
)。t
ij,x
由该网格参考点对应的曲面空间点出曲面的局部几何性质决定,在曲面s
ij,x
处有双参数幺正标架刀轴向量t
ij,x
定义在幺正标架中。根据机床反向运动学模型,刀具在曲面s
ij,x
出的位置与姿角[s
ij,x
,t
ij,x
]可分解为各轴的实际位置[x
ij,x
,y
ij,x
,z
ij,x
,a
ij,x
,c
ij,x
],记为5.如权利要求1所述的方法,其特征在于,所述步骤4包括以下子步骤:(4.1)计算网格单元速度通道值,沿u向运动时在网格处各轴的速度通道值为同理,沿v向运动时处各轴的速度为以此获取网格速度通道值。
(4.2)根据网格速度通道值,可由此获取网格加速度通道值,其中,u向:定义进而,加加速度通道值为定义v向:定义进而,加加速度通道值为定义6.如权利要求1所述的方法,其特征在于,所述步骤5可按满足机床动力学约束的速度规划模型将各个网格上的速度通道值、加速度通道值、加加速度通道值转化为进给速度通道值,以u向计算为例,第i行j列的网格其沿u向进度速度为:其中:同理,第i行j列的网格其沿v向进度速度为:其中:7.如权利要求1所述的方法,其特征在于,所述步骤6中,所述比较网格单元沿不同方向运动时进给速度的快慢,为网格单元标记标签具体为:记刀具在同一网格经u向参考点运动时进给速度的快慢,为网格单元标记标签具体为:记刀具在同一网格经u向参考点时机床各轴的位置,在各参考点记录位置属性,并逐单元计算速度属性、加速度属性、加加速度属性,最后计算参考点上的进给速度,若经u向的速度大于经v向的速度,则标记该网格为u类型网格,反之则标记为v类型网格。若两者速度均较低,则标记该网格为o类型网格。8.如权利要求1所述的方法,其特征在于,所述步骤7中,网格包含3种类型,即带属性网格、无属性网格以及边缘网格。该步骤包含以下步骤:(7.1)选取网格和,尚未归属区域的任意带属性网格单元标记为种子网格单元,并将添加到区域集合(7.2)将网格单元周围同标签的属性网格添加到辅助定义空间中;(7.3)在定义空间中选择任意网格单元为种子单元,放入区域集合中,并将
从辅助定义空间中删去;(7.4)若定义空间不为空,则重复以上(1)~(3)步;(7.5)若定义空间为空,结束聚合过程,区域集合即为种子网格所属区域;(7.6)依次可获得参数域所有独立区域。9.如权利要求1所述的方法,其特征在于,所述步骤8包含以下步骤:(8.1)定义边缘单元,将区域集合任意边缘单元放入轮廓集合中,并定义为种子单元;(8.2)遍历种子单元的相邻单元,将不属于轮廓集合的边缘单元添加到临时集合中,若临时集合中只有一个单元,则将该单元放入轮廓集合并设为新的种子单元;(8.3)若临时集合中不止一个单元,则选取距离最近的单元为新的种子单元;(8.4)若临时集合为空,则遍历结束,子区域轮廓生成完毕。
技术总结
本发明公开了一种基于数控插补映射的曲面参数域自适应划分方法,该方法能实现机床动态特性在曲面参数域上的映射,实现曲面区域的划分。针对输入的待加工曲面,该方法先在参数域等参数生成一组网格,在网格单元的参考点上比较机床各轴的变化状态,以此为依据为网格标记标签。通过聚合算法将同标签的相连网格汇聚成区域,最后通过链式算法获取区域边界轮廓。划分结果能保证在相同区域内以相同策略规划的刀路能最大程度的发挥机床动态特性,满足高速、高精度加工的要求。高精度加工的要求。高精度加工的要求。
技术研发人员:孙扬帆
受保护的技术使用者:浙江大学高端装备研究院
技术研发日:2021.09.13
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。