1.本实用新型涉及机器人折叠臂的技术领域,尤其涉及一种折叠臂稳定装置。
背景技术:
2.目前巡检机器人能适应在各种室内及室外环境下工作,使用机器人进行巡检工作具有自主移动、高精度导航和精准定位等功能。工作过程中主要通过巡检机器人上的相机感应来进行,此时,有些巡检机器人通过折叠臂带动云台和相机进行上下移动来实现巡检时不同角度和方位拍摄的功能,折叠臂通过电机控制折叠和展开,但是当折叠臂展开时,存在折叠臂下落不稳的问题,以及折叠臂折叠时,电机负载最大,存在遇到外力振动造成电机过载而损坏的问题。
技术实现要素:
3.鉴于上述的分析,本实用新型旨在提供一种折叠臂稳定装置,用以解决现有折叠臂展开时折叠臂下落不稳的问题,以及折叠臂折叠时,电机因遇到外力振动造成过载而损坏的问题。
4.本实用新型的目的主要是通过以下技术方案实现的:
5.本实用新型提供一种折叠臂稳定装置,包括拉伸结构和锁定结构;
6.所述拉伸结构和所述锁定结构用于锁定或释放折叠臂的第一从动臂;
7.所述拉伸结构减轻折叠臂的动力单元的负载。
8.可选地,所述拉伸结构包括拉伸式可控气弹簧和安装件,所述拉伸式可控气弹簧的一端通过所述安装件与所述固定板活动连接。
9.可选地,所述拉伸式可控气弹簧包括控制端。
10.可选地,所述拉伸结构还包括控制连接件。
11.可选地,所述拉伸结构还包括通电部件。
12.可选地,所述控制连接件连接所述控制端和所述通电部件。
13.可选地,所述锁定结构包括锁体和锁扣。
14.可选地,所述锁定结构还包括上磁铁和下磁铁。
15.可选地,所述锁体底部设有凹槽。
16.可选地,所述锁扣设有倒u型扣。
17.与现有技术相比,本实用新型提供的折叠臂稳定装置至少可实现如下有益效果之一:
18.1.本实用新型设计的拉伸结构和锁定结构共同锁定第一从动臂,从而固定整体折叠臂,减少电机负载,使得电机不易损坏的同时增强电机承受外力振动的能力。
19.2.本实用新型设计的拉伸结构减轻动力单元的电机的负载,增强第一从动臂折叠过程的稳定性,进而提升整体折叠臂折叠的稳定性。
20.3.本实用新型设计上磁铁与下磁铁靠近产生吸引力,利于折叠臂稳定地向上折
叠,且减少动力单元负载,减少电机扭矩,增强使用寿命。
21.本实用新型中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本实用新型的其他特征和优点将在随后的内容中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过文字以及附图中所特别指出的内容中来实现和获得。
附图说明
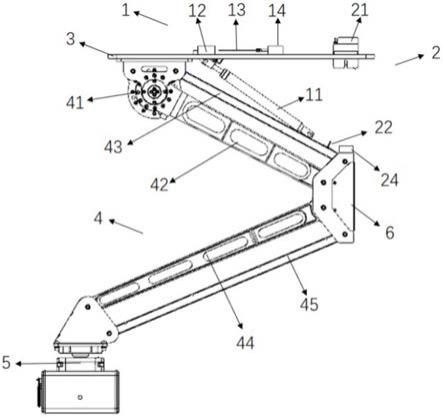
22.图1为本实用新型折叠臂和稳定装置装配的结构示意图;
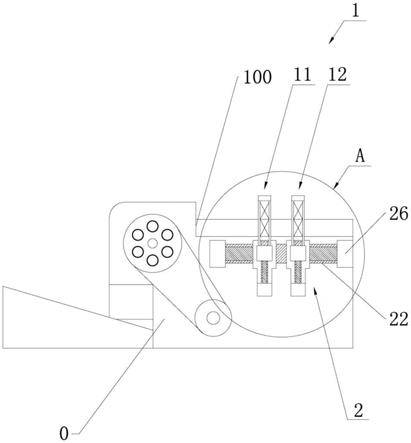
23.图2为本实用新型的上磁体与下磁体位置结构示意图;
24.图3为本实用新型拉伸式可控气弹簧的结构示意图;
25.图4为本实用新型锁体与锁扣配合的结构示意图;
26.图5为本实用新型锁扣的结构示意图。
27.附图标记:
[0028]1‑
拉伸结构;11
‑
拉伸式可控气弹簧;111
‑
拉杆;112
‑
控制端;12
‑
安装件;13
‑
控制连接件;14
‑
通电部件;2
‑
锁定结构;21
‑
锁体;211
‑
手动拨杆;22
‑
锁扣;23
‑
上磁铁;24
‑
下磁铁;3
‑
固定板;4
‑
折叠臂;41
‑
动力单元;42
‑
第一主动臂;43
‑
第一从动臂;44
‑
第二主动臂;45
‑
第二从动臂;5
‑
云台;6
‑
传动关节总成。
具体实施方式
[0029]
下面结合附图来具体描述本实用新型的优选实施例。
[0030]
如图1所示,折叠臂4包括动力单元41、第一主动臂42、第一从动臂43、第二主动臂44、第二从动臂45,其中动力单元41固定安装在固定板3上,第一主动臂42与第一从动臂43的一端均安装在动力单元41上,另一端均安装在传动关节总成6上;第二主动臂44、第二从动臂45一端均安装在传动关节总成6上,另一端均与云台5连接;动力单元41带动第一主动臂42转动,第一主动臂42带动第一从动臂43转动,同时带动第二主动臂44转动,第二主动臂44带动第二从动臂45转动;第一主动臂42、第一从动臂43以与动力单元41连接的一端为固定点,与传动关节总成6的一端向上折叠或向下展开运动;第二主动臂44、第二从动臂45随着传动关节总成6向上折叠或向下展开运动。
[0031]
本实用新型的一个具体实施例,如图1
‑
5所示,本实用新型实施例公开了一种折叠臂稳定装置,包括拉伸结构1和锁定结构2,拉伸结构1、锁定结构2均与固定板3、第一从动臂43可拆卸连接;拉伸结构1与锁定结构2用于锁定或释放第一从动臂43,拉伸结构1可减少折叠臂的动力单元的负载。
[0032]
本实施例中,增设稳定装置,可稳定地上下运动,且有效地减小动力单元41的负载,减少动力单元41的电机扭矩,增加动力单元41的使用寿命;动力单元41可输出恒定功率,以恒定速度带动折叠臂向上折叠和向下展开。
[0033]
当折叠臂需要向上折叠时,动力单元41带动折叠臂向上折叠,第一从动臂43与动力单元41连接的一端转动,另一端转动的同时向上移动,同时拉伸结构1带动第一从动臂43的另一端向上运动,从而减小动力单元41的负载,同时提升整体折叠臂折叠的稳定性;折叠臂需要停止折叠时,拉伸结构1和锁定结构2共同锁定第一从动臂43,从而固定整体折叠臂,
减少电机负载,使得电机不易损坏,同时增强电机承受外力振动的能力;当折叠臂需要向下展开时,拉伸结构1和锁定结构2通电解除对第一从动臂43的锁定,折叠臂在动力单元41带动下向下展开,第一从动臂43向下运动时,拉伸结构1拉动第一从动臂43向下展开,从而减缓动力单元41的负载,使折叠臂更加稳定地向下展开。
[0034]
拉伸结构1包括拉伸式可控气弹簧11和安装件12,拉伸式可控气弹簧11的一端通过安装件12与固定板3活动连接,另一端与第一从动臂43活动连接;具体地,拉伸式可控气弹簧11与固定板3连接的一端与动力单元41在固定板3的同侧。
[0035]
拉伸式可控气弹簧11设有控制端112、开关、拉杆111和缸体,控制端112设置在拉伸式可控气弹簧11与固定板3连接的一端,控制端112与开关连接,拉动控制端112能够关闭开关,锁定拉伸式可控气弹簧11,使得拉杆111不再进行伸缩,保持拉杆111稳定;控制端112还能够打开开关,使得拉杆111可在缸体内进行伸缩运动。
[0036]
拉伸结构1还包括控制连接件13和通电部件14,控制连接件13和通电部件14均在固定板3的上表面;控制连接件13连接控制端112和通电部件14。折叠臂4需要停止折叠或展开时通电部件14通电,拉动控制连接件13,进而拉动控制端112关闭开关使得拉杆111不再进行伸缩,此时锁定第一从动臂43;折叠臂需要进行折叠或展开操作时,通电部件14断电,释放控制连接件13,进而释放控制端112,控制端112打开开关,使得拉杆111可在缸体内运动,动力单元41带动折叠臂向上折叠或向下展开,同时拉伸式可控气弹簧11对第一折叠臂43起到拉动的作用,用以减轻动力单元41的负载,延长动力单元41的使用寿命,同时使折叠臂更加稳定地向上折叠或向下展开。
[0037]
可选地,控制连接件13为钢丝;通电部件14为电磁铁。
[0038]
锁定结构2包括锁体21和锁扣22,固定板3上设有通孔,锁体21通过通孔固定安装在固定板3上,安装在远离动力单元41的固定板3的一端;锁扣22安装在与锁体21相对应位置的第一从动臂43上。
[0039]
如图3和图4所示,锁体21底部中心设有前后连通的凹槽,凹槽通过固定板3的通孔设置在固定板3下表面,锁体21内设有相互配合锁定或分离解锁的第一锁定件和第二锁定件,第一锁定件设有固定在锁体21的外壳上的第一转动轮和与第一转动轮转动连接的第一转动部,第一转动部设有操作端和第一配合端;第二锁定件设有固定在锁体21的外壳上的第二转动轮和与第二转动轮转动连接的第二转动部,第二转动部设有带有卡勾的锁定端和第二配合端,锁定端的卡勾设置在凹槽内,第一配合端与第二配合端可卡接固定或分离;锁扣22设有安装板和倒u型扣,倒u型扣的底端与安装板可拆卸连接,安装板安装在与锁体21相对应位置的第一从动臂43上。
[0040]
本实施例中,锁扣22的倒u型扣向上运动到达凹槽内,推动第二转动部向上转动,此时锁定端的卡勾向上转动,卡勾进入倒u型扣内,将其卡住,同时第一配合端向上转动与第二配合端卡接固定,从而将第一从动臂43锁定,增强稳定性,减少动力单元41负载;当折叠臂需要向下展开时,锁体21通电,带动第一转动部的操作端向内转动,此时第一配合端向外转动,与第二配合端分离,同时第二配合端向下转动,带动锁定端向下转动,从倒u型扣内出来,释放锁扣22。
[0041]
进一步地,锁体21还包括与操作端连接的手动拨杆211,当锁体21在通电状态下操作端无法正常转动时,可通过手动拨杆211转动操作端。
[0042]
锁定结构2还包括上磁铁23和下磁铁24,下磁铁24设置在传动关节总成6的上表面,上磁铁23设置在与下磁铁24相对应位置的固定板3的下表面,当折叠臂向上折叠时,上磁铁23与下磁铁24靠近产生吸引力,利于折叠臂稳定地向上折叠,且减少动力单元41负载,减少电机扭矩,增强使用寿命;当折叠臂向下展开时,上磁铁23与下磁铁24的吸引力可减缓动力单元41的负载,使之更加平稳地下降。
[0043]
本实用新型设计的稳定装置可稳定地上下运动,且有效地减小动力单的负载,减少动力单元的电机扭矩,增加动力单元的使用寿命。
[0044]
需要说明的是,本实用新型提供的稳定装置中,拉伸结构、锁定结构所涉及的控制装置、控制方法或软件方法均为现有技术常见的装置或方法,仅需要将各个具有相应功能的装置通过本实用新型实施例所给出的连接关系进行连接,即可得到本实用新型的技术方案,其中并不涉及任何控制装置、控制方法和软件方面的改进。而至于各个相应功能的装置之间的连接方式,均是本领域技术人员可以采用现有技术实现的,在此不做详细说明。
[0045]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。