1.本实用新型涉及一种机器人闹钟臂膀弹性件安装装置。
背景技术:
2.现有对机器人闹钟臂膀弹性件的安装均是通过手动按压对准限位,并进行放置立柱、弹簧,安装时单人难以完成操作,耗费人力,影响安装效率。
技术实现要素:
3.鉴于现有技术的不足,本实用新型所要解决的技术问题是提供机器人闹钟臂膀弹性件安装装置,不仅结构合理,而且便捷高效。
4.为了解决上述技术问题,本实用新型的技术方案是:机器人闹钟臂膀弹性件安装装置,包括一安装底座,安装底座上表面沿其长度方向开设有安装槽,该安装槽均由若干圆形孔槽弧形过渡对接组成,所述圆形孔槽内均同轴开设有螺母安装槽,所述安装底座上表面固设有竖直朝上延伸的支杆,并通过支杆朝上依次叠设有立柱定位机构及限位板。
5.进一步的,所述安装底座呈矩形块状,所述支杆分设在安装底座四角处,所述立柱定位机构包括左右对称的两立柱定位板,所述立柱定位板内端均沿前后延伸方向间隔开设有若干半圆状的定位槽孔,所述定位槽孔均与圆形孔槽一一对应。
6.进一步的,两立柱定位板后端均开设与支杆插接的通孔,前端内侧均开设有与支杆对接的u型槽,且该u型槽均上下贯穿立柱定位板,u型槽u型开口朝内。
7.进一步的,所述限位板呈方形,其四角处均开设有与支杆插接的圆孔,其中部上下贯穿开设有与安装槽形状完全一致的安装孔。
8.进一步的,所述两立柱定位板组合对接后的外周、限位板外周均与安装底座外周重叠。
9.进一步的,所述臂膀弹性件包括上下对称的压板,两压板之间的前后端均设有弹簧,弹簧外周均套设有立柱,所述两压板表面均开设有供螺栓上下依次贯穿压板及弹簧并固紧的细孔,所述压板前后端部均与圆形孔槽对接。
10.与现有技术相比,本实用新型具有以下有益效果:通过取出限位板,将两立柱定位板朝外旋转,使两立柱定位板分离,接着先将单个螺母放入螺母安装槽内,接着将臂膀弹性件置入安装槽内,并朝内旋转合并两立柱定位板将定位柱限位,再插接上限位板完成顶部压板的限位,最后通过螺栓自上朝下插入细孔旋接入螺母固紧,最后完成臂膀弹性件的安装,即单人即可快速便捷的完成安装工作,加快工作效率,且通过限位组件的限位作用,臂膀弹性件的安装稳定,成品质量好。
11.下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
附图说明
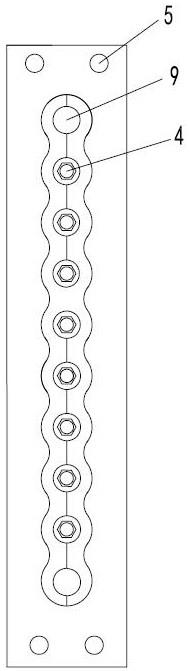
12.图1为本实用新型实施例的构造示意图;
13.图2为本实用新型实施例中立柱定位机构展开示意图;
14.图3为本实用新型实施例中限位板的构造示意图;
15.图4为本实用新型实施例中臂膀弹性件的内部构造示意图;
16.图5为实用新型实施例中臂膀弹性件的俯视图。
17.图中:1
‑
安装底座,2
‑
安装槽,3
‑
圆形孔槽,4
‑
螺母安装槽,5
‑
支杆,6
‑
立柱定位机构,7
‑
限位板,8
‑
立柱定位板,9
‑
定位槽孔,10
‑
通孔,11
‑
u型槽,12
‑
圆孔,13
‑
安装孔,14
‑
压板,15
‑
弹簧,16
‑
立柱,17
‑
螺栓,18
‑
细孔,a
‑
臂膀弹性件。
具体实施方式
18.为让本实用新型的上述特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下。
19.如图1~5所示,机器人闹钟臂膀弹性件安装装置,包括一安装底座1,安装底座上表面沿其长度方向开设有安装槽2,该安装槽均由若干圆形孔槽3弧形过渡对接组成,其弧形过渡弧面均呈内凹状,与圆形孔槽形成左右两侧呈类波浪延伸状的安装槽,所述圆形孔槽内均同轴开设有螺母安装槽4,所述安装底座上表面固设有竖直朝上延伸的支杆5,并通过支杆朝上依次叠设有立柱定位机构6及限位板7,所述螺母安装槽呈阶梯孔状,其顶部孔稍大用以承接安装螺母,底部孔稍小以便螺栓穿过。
20.在本实用新型实施例中,所述安装底座呈矩形块状,所述支杆共四根分设在安装底座四角处,所述立柱定位机构包括左右对称的两立柱定位板8,所述立柱定位板内端面均沿前后延伸方向间隔开设有若干半圆状的定位槽孔9,定位槽孔均上下贯穿立柱定位板,由于是左右对称立柱定位板,两立柱定位板在朝内对接对立柱限位时接触,半圆状的定位槽孔将组合为圆形,组合为圆形的定位槽孔孔径小于圆形孔槽的孔径,所述定位槽孔均与圆形孔槽一一对应。
21.在本实用新型实施例中,两立柱定位板后端均开设与支杆插接的通孔10,前端内侧均开设有与支杆对接的u型槽11,且该u型槽均上下贯穿立柱定位板,u型槽u型开口朝内,即两立柱定位板均可绕着支杆内外转动,以便臂膀弹性件的限位与取出。
22.在本实用新型实施例中,所述限位板呈方形,其四角处均开设有与支杆插接的圆孔12,其中部上下贯穿开设有与安装槽形状完全一致的安装孔13,在臂膀弹性件置入后限位板插入,其顶部表面与臂膀弹性件顶部表面同水平。
23.在本实用新型实施例中,所述两立柱定位板组合对接后的外周、限位板外周均与安装底座外周重叠,结构紧凑,整体美观。
24.在本实用新型实施例中,所述臂膀弹性件a包括上下对称的压板14,两压板之间的前后端均设有弹簧15,弹簧外周均套设有立柱16,所述两压板表面均开设有供螺栓17上下依次贯穿压板及弹簧并固紧的细孔18,所述压板前后端部均与圆形孔槽对接。
25.本实用新型实施例的工作原理:首先取出限位板,将两立柱定位板朝外旋转,使两立柱定位板分离,接着先将单个螺母放入螺母安装槽内,接着将臂膀弹性件置入安装槽内,并朝内旋转合并两立柱定位板将定位柱限位,再插接上限位板完成顶部压板的限位,最后通过螺栓自上朝下插入细孔旋接入螺母固紧,完成臂膀弹性件的安装,但螺栓仅安装一个,另一端需要与机器人臂膀通过螺栓连接。
26.本实用新型不局限于上述最佳实施方式,任何人在本实用新型的启示下都可以得出其他各种形式的机器人闹钟臂膀弹性件安装装置。凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属本实用新型的涵盖范围。
技术特征:
1.机器人闹钟臂膀弹性件安装装置,其特征在于:包括一安装底座,安装底座上表面沿其长度方向开设有安装槽,该安装槽均由若干圆形孔槽弧形过渡对接组成,所述圆形孔槽内均同轴开设有螺母安装槽,所述安装底座上表面固设有竖直朝上延伸的支杆,并通过支杆朝上依次叠设有立柱定位机构及限位板。2.根据权利要求1所述的机器人闹钟臂膀弹性件安装装置,其特征在于:所述安装底座呈矩形块状,所述支杆分设在安装底座四角处,所述立柱定位机构包括左右对称的两立柱定位板,所述立柱定位板内端均沿前后延伸方向间隔开设有若干半圆状的定位槽孔,所述定位槽孔均与圆形孔槽一一对应。3.根据权利要求2所述的机器人闹钟臂膀弹性件安装装置,其特征在于:两立柱定位板后端均开设与支杆插接的通孔,前端内侧均开设有与支杆对接的u型槽,且该u型槽均上下贯穿立柱定位板,u型槽u型开口朝内。4.根据权利要求2所述的机器人闹钟臂膀弹性件安装装置,其特征在于:所述限位板呈方形,其四角处均开设有与支杆插接的圆孔,其中部上下贯穿开设有与安装槽形状完全一致的安装孔。5.根据权利要求2所述的机器人闹钟臂膀弹性件安装装置,其特征在于:所述两立柱定位板组合对接后的外周、限位板外周均与安装底座外周重叠。6.根据权利要求1所述的机器人闹钟臂膀弹性件安装装置,其特征在于:所述臂膀弹性件包括上下对称的压板,两压板之间的前后端均设有弹簧,弹簧外周均套设有立柱,所述两压板表面均开设有供螺栓上下依次贯穿压板及弹簧并固紧的细孔,所述压板前后端部均与圆形孔槽对接。
技术总结
本实用新型涉及一种机器人闹钟臂膀弹性件安装装置,包括一安装底座,安装底座上表面沿其长度方向开设有安装槽,该安装槽均由若干圆形孔槽弧形过渡对接组成,所述圆形孔槽内均同轴开设有螺母安装槽,所述安装底座上表面固设有竖直朝上延伸的支杆,并通过支杆朝上依次叠设有立柱定位机构及限位板,臂膀弹性件置放在安装槽内并通过合并两立柱定位板将定位柱限位,通过插接上限位板完成顶部压板的限位,螺栓接入完成安装,该安装装置结构简单,操作便捷。便捷。便捷。
技术研发人员:王高祥 王翀
受保护的技术使用者:福州三兴家居用品有限公司
技术研发日:2021.01.29
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。