1.本实用新型涉及车辆技术领域,具体涉及一种无人驾驶车网络结构和具有其的车辆。
背景技术:
2.随着无人驾驶技术不断深入和发展,汽车内部各控制系统之间信息交互越来越多,控制器局域网络通信数据量随之增加,单一低速率的控制器局域网络结构不利于整车网络平台的扩展,不能满足网络架构平台化设计需求。
技术实现要素:
3.有鉴于此,本实用新型提供一种无人驾驶车网络结构。
4.本实用新型还提供一种具有上述无人驾驶车网络结构的车辆。
5.为解决上述技术问题,本实用新型采用以下技术方案:
6.根据本实用新型实施例的无人驾驶车网络结构,用于连接网关控制器、组合仪表、车身控制器、发动机系统、整车控制器、雷达和自动驾驶控制器,所述无人驾驶车网络结构包括:
7.娱乐网段,所述娱乐网段的终端节点连接所述网关控制器和所述组合仪表;
8.车身网段,所述车身网段的终端节点连接所述网关控制器和所述车身控制器;
9.动力网段,所述动力网段的终端节点连接所述网关控制器和所述发动机系统,所述动力网段还连接所述整车控制器;
10.自动驾驶网段,所述自动驾驶网段的终端节点连接所述自动驾驶控制器和所述雷达,所述自动驾驶控制器收集所述雷达传输的数据,并将自动驾驶决策发送至所述动力网段,所述整车控制器接收所述自动驾驶控制器发送的数据,并发送至车内多个控制器。
11.进一步地,所述娱乐网段、所述车身网段、所述动力网段和所述自动驾驶网段的网络传输速率分别为500kbps。
12.进一步地,所述无人驾驶车网络结构还包括:obd诊断接口,所述娱乐网段、所述车身网段、所述动力网段和所述自动驾驶网段分别与所述obd诊断接口相连。
13.进一步地,所述娱乐网段还设有影音娱乐系统、倒车影像和胎压监测系统。
14.进一步地,所述车身网段还设有空调系统和无钥匙进入系统。
15.进一步地,所述动力网段还设有变速箱系统、电子换挡系统、电动转向系统和制动系统。
16.进一步地,所述雷达包括激光波雷达、前向毫米波雷达和侧向毫米波雷达。
17.进一步地,所述雷达传输的数据为can数据。
18.根据本实用新型第二方面实施例的车辆包括上述实施例所述的无人驾驶车网络结构。
19.本实用新型的上述技术方案的有益效果如下:
20.根据本实用新型实施例的无人驾驶车网络结构,通过采用通用化电控单元接口设计方式,为网络平台控制系统拓展预留足够的空间,有效降低总线负载,提高了网络数据的传输效率,有利于整车平台化架构设计实现。
附图说明
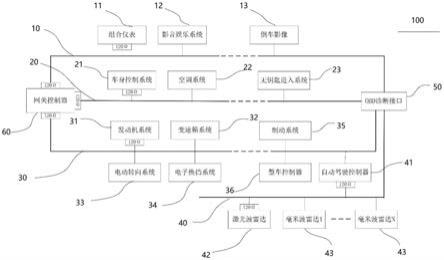
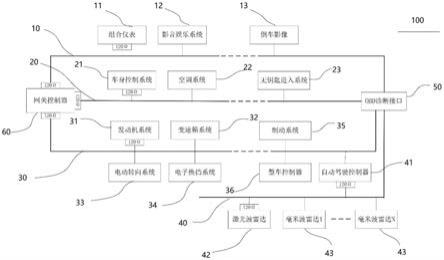
21.图1为本实用新型实施例中无人驾驶车网络结构示意图。
22.附图标记
23.无人驾驶车网络结构100;
24.娱乐网段10;组合仪表11;影音娱乐系统12;倒车影像13;
25.车身网段20;车身控制器21;空调系统22;无钥匙进入系统23;
26.动力网段30;发动机系统31;变速箱系统32;电动转向系统33;电子换挡系统34;制动系统35;整车控制器36;
27.自动驾驶网段40;自动驾驶控制器41;激光波雷达42;毫米波雷达43;
28.网关控制器50;
29.obd诊断接口60。
具体实施方式
30.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例的附图,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
31.下面首先结合附图具体描述根据本实用新型实施例的无人驾驶车网络结构100。
32.根据本实用新型实施例的无人驾驶车网络结构100用于连接网关控制器50、组合仪表11、车身控制器21、发动机系统31、整车控制器36、雷达和自动驾驶控制器41,无人驾驶车网络结构100包括娱乐网段10、车身网段20、动力网段30和自动驾驶网段40。
33.具体而言,如图1所示,娱乐网段10的终端节点连接网关控制器50和组合仪表11,车身网段20的终端节点连接网关控制器50和车身控制器21,动力网段30的终端节点连接网关控制器50和发动机系统31,动力网段30还连接整车控制器36,自动驾驶网段40的终端节点连接自动驾驶控制器41和雷达,自动驾驶控制器41收集雷达传输的数据,并将自动驾驶决策发送至动力网段30,整车控制器36接收自动驾驶控制器41发送的数据,并发送至车内多个控制器。
34.也就是说,无人驾驶车网络结构100将整车划分为分娱乐网段10、车身网段20、动力网段30及自动驾驶网段40四个网段,各网段均配置较高的传输速率,网段的终端节点选择整车基本配置的控制系统,整车控制器36作为车内其他控制器接收/发送无人驾驶相关数据的统一接口,避免了娱乐系统和舒适系统对动力、底盘以及无人车控制系统网络数据传输的影响,提高了整车的安全性,并为网络平台控制系统拓展预留足够的空间。
35.由此,根据本实用新型实施例的无人驾驶车网络结构100,通过采用通用化电控单元接口设计方式,为网络平台控制系统拓展预留足够的空间,有效降低总线负载,提高了网络数据的传输效率,有利于整车平台化架构设计实现。
36.优选地,娱乐网段10、车身网段20、动力网段30和自动驾驶网段40的网络传输速率分别为500kbps。
37.具体而言,各网段传输速率均设置为500kbps,有效降低了网络数据传输的总线负载,提高了网络数据的传输效率,保证了网络数据传输的准确性,增强了网络数据传输的可靠性。网段终端节点选用整车基本配置的控制系统,保证了车型配置的变更不会对网络数据传输造成影响。
38.进一步地,无人驾驶车网络结构100还包括obd诊断接口60,娱乐网段10、车身网段20、动力网段30和自动驾驶网段40分别与obd诊断接口60相连。自动驾驶网段40通信数据可通过obd诊断接口60进行监测,有利于自动驾驶网段40传输数据有效性的验证。
39.根据本实用新型的一个实施例,娱乐网段10还设有影音娱乐系统12、倒车影像13和胎压监测系统等系统,由此,实现无人车娱乐及辅助系统的网络数据传输。
40.可选地,车身网段20还设有空调系统22和无钥匙进入系统23等系统,从而实现无人车舒适系统的网络数据传输。
41.在本实用新型的一个实施例中,动力网段30还设有变速箱系统32、电子换挡系统34、电动转向系统33和制动系统35等系统,由此,实现无人车动力系统的网络数据传输。
42.进一步地,雷达包括激光波雷达42、前向毫米波雷达43和侧向毫米波雷达43等系统。
43.优选地,雷达传输的数据为can数据。
44.具体地,自动驾驶控制器41连接自动驾驶网段40,收集各个雷达传输的can数据,将自动驾驶决策相关数据发送至动力网段30,整车控制器36在动力网段30上接收自动驾驶控制器41的can数据信息,再转发给车内其他控制器,整车控制器36作为车内其他控制器接收/发送无人驾驶相关can数据的统一接口,外后期平台扩展预留空间。
45.总而言之,根据本实用新型实施例的无人驾驶车网络结构100,通过采用通用化电控单元接口设计方式,为网络平台控制系统拓展预留足够的空间,有效降低总线负载,提高了网络数据的传输效率,有利于整车平台化架构设计实现。
46.根据本实用新型实施例的车辆包括根据上述实施例的无人驾驶车网络结构100,由于根据本实用新型上述实施例的无人驾驶车网络结构100具有上述技术效果,因此,根据本实用新型实施例的车辆也具有相应的技术效果,即为网络平台控制系统拓展预留足够的空间,有效降低总线负载,提高了网络数据的传输效率,有利于整车平台化架构设计实现。
47.根据本实用新型实施例的车辆的其他结构和操作对于本领域技术人员而言都是可以理解并且容易实现的,因此不再详细描述。
48.除非另作定义,本实用新型中使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。本实用新型中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
49.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进
和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。