1.本发明涉及半导体领域,尤其涉及一种半导体反应设备及其位置校准方法。
背景技术:
2.为了控制炉管石英管的体积,晶舟开口的尺寸受到了严格的限制,硅片在传送时最小冗余间距为4~6mm,这对于机械手臂运动的精确性以及各个机械部件相对位置的稳定性提出了更高的要求,由于晶舟需要进入炉管进行高温工艺,无法在晶舟上加装传感器,目前的设计均是通过在传动装置上安装传感器来间接判断晶舟的位置。但由于传动过程中的各部件之间不是固定连接,各部件之间可能会出现位置偏差,进而出现传感器侦测到晶舟已到达预设姿态,但晶舟实际位置并没有到达预设姿态的情况,在传递过程中晶圆与晶舟发生碰撞,造成掉片或破片。现需要一种半导体反应设备及晶圆承载模块位置校准方法,确保晶舟在每次工艺开始和结束时回到预设姿态,防止在晶圆传递过程中发生晶圆掉落或破损的现象。
技术实现要素:
3.本发明的目的在于提供一种半导体反应设备及其位置校准方法,确保晶舟在每次工艺开始和结束时回到预设姿态,防止在晶圆传递过程中发生晶圆掉落或破损的现象。
4.为了达到上述目的,本发明提供了一种半导体反应设备,包括:
5.反应腔、晶圆承载模块、晶圆传递模块及至少一个位置检测模块;
6.所述晶圆承载模块用于承载晶圆,并通过移动在交接工位和反应工位之间切换,所述交接工位位于所述反应腔外,所述反应工位位于所述反应腔内;
7.所述位置检测模块包括第一激光发送单元、激光接收单元及第一阻挡单元,所述激光接收单元设置于所述晶圆传递模块上,所述晶圆传递模块与所述第一激光发送单元位于所述交接工位的两侧,所述第一阻挡单元位于所述晶圆承载模块上;
8.所述晶圆承载模块位于所述交接工位上时,所述第一激光发送单元、所述激光接收单元及所述第一阻挡单元对准,根据所述激光接收单元的检测结果判定所述晶圆承载模块是否处于预设姿态。
9.可选的,所述第一阻挡单元的外壁上涂布有碳化硅涂层。
10.可选的,所述位置检测模块具有两个,且两个所述位置检测模块沿横向分布于所述晶圆传递模块的两侧。
11.可选的,所述晶圆承载模块具有若干用于存储晶圆且沿垂向分布的存储工位,所述晶圆传递模块具有若干与所述存储工位一一对应的传递工位;当所述晶圆承载模块处于所述预设姿态时,所述传递工位向对应的所述存储工位上传递晶圆。
12.可选的,所述晶圆传递模块包括:
13.双叉式机械手,包括若干沿垂向分布的双叉,每个所述双叉的表面均为一个所述交接工位,用于承载一个所述晶圆。
14.可选的,所述位置检测模块还包括:
15.至少一个第二激光发送单元及至少一个第二阻挡单元,所述第二激光发送单元与所述第一激光发送单元沿垂向对齐;所述第二阻挡单元位于所述晶圆承载模块上,并与所述第一阻挡单元沿垂向对齐;所述第一激光发送单元与所述第二激光发送单元之间沿垂向上距离等于所述第一阻挡单元与所述第二阻挡单元之间沿垂向上距离。
16.可选的,所述晶圆承载模块在所述交接工位和所述反应工位内均可在设定角度范围内旋转。
17.可选的,还包括第一计数器和第二计数器,所述第一计数器设置于所述激光接收单元内,所述第二计数器设置于所述晶圆承载模块内;
18.所述第一计数器在所述激光接收单元接收到的激光中断时计数一次,当所述第一计数器的计数大于第一设定值时,所述晶圆承载模块按照设定程序旋转至设定姿态,所述第二计数器在所述第一计数器计数超过第一预设值时计数一次,当所述第二计数器的计数值大于第二设定值时,报警提醒。
19.本发明还提供一种利用上述任意一项所述半导体反应设备的位置校准的方法,包括:
20.第一激光发送单元发出激光,将第一激光发送单元与激光接收单元对准;
21.将晶圆承载模块移动至交接工位;
22.根据所述激光接收单元的检测结果判定所述晶圆承载模块是否处于预设姿态,当所述晶圆承载模块处于预设姿态时,晶圆传递模块向所述晶圆承载模块传递晶圆。
23.可选的,将所述晶圆承载模块移动至交接工位后,还包括:
24.所述晶圆传递模块沿垂向移动,记录移动过程中所述激光接收单元接收到的激光中断次数,当中断次数大于第一设定值时,所述晶圆承载模块按照设定程序旋转至设定姿态,当所述晶圆承载模块旋转的次数大于第二设定值时,报警提醒。
25.在本发明提供所述半导体反应设备及其位置校准方法中,包括反应腔、晶圆承载模块、晶圆传递模块及至少一个位置检测模块;所述晶圆承载模块用于承载晶圆,并通过移动在交接工位和反应工位之间切换;所述位置检测模块包括第一激光发送单元、激光接收单元及第一阻挡单元;所述晶圆承载模块位于所述交接工位上时,所述第一激光发送单元、所述激光接收单元及所述第一阻挡单元对准,根据所述激光接收单元的检测结果判定所述晶圆承载模块是否处于预设姿态,保证每次工艺开始和结束后,所述晶圆承载模块回到预设姿态再进行晶圆传递,避免晶圆传送时发生晶圆掉落或破损的现象。
附图说明
26.图1为一种半导体反应设备结构示意图;
27.图2为图1中的半导体反应设备的a视角的放大图;
28.图3为晶圆承载模块姿态异常时a视角的俯视图;
29.图4为晶圆承载模块姿态正常时取放晶圆的示意图;
30.图5为晶圆承载模块姿态异常时取放晶圆的示意图;
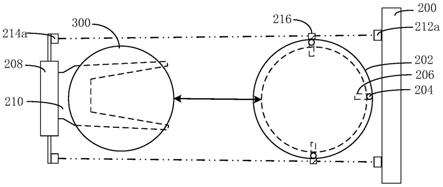
31.图6为本发明实施例提供的一种半导体反应设备的平面示意图;
32.图7为本发明实施例提供的一种半导体反应设备的晶圆承载模块的正视图;
33.图8为本发明实施例提供的一种半导体反应设备的晶圆承载模块的侧视图;
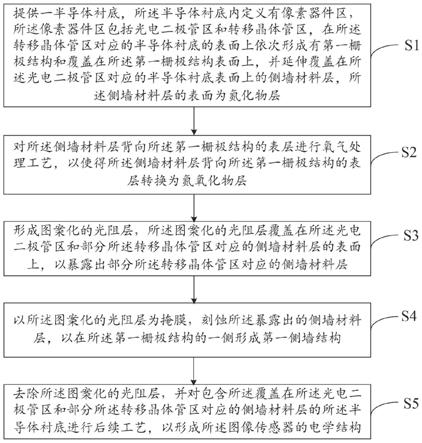
34.图9为本发明实施例提供的一种半导体反应设备的位置校准的方法的流程图;
35.图10为本发明实施例提供的一种半导体反应设备的位置校准的方法的程序图;
36.其中,附图说明为:
37.100、202
‑
晶圆承载模块;101
‑
反应腔;102
‑
磁流体;103
‑
旋转销;104
‑
归位传感器;106、204
‑
支撑柱;108、206
‑
支撑脚;110、300
‑
晶圆;
38.200
‑
机架;208
‑
双叉式机械手;210
‑
双叉;211
‑
晶圆传递模块;212a
‑
第一激光发送单元;212b、212c
‑
第二激光发送单元;214
‑
激光接收单元;216a
‑
第一阻挡单元;216b、216c
‑
第二阻挡单元;218
‑
顶板;220
‑
底板。
具体实施方式
39.图1为一种半导体反应设备结构示意图,如图1所示,所述半导体反应设备包括:反应腔101、可旋转的晶圆承载模块100及归位传感器104,具体的,所述晶圆承载模块100可移动进出所述反应腔101,并在反应过程中进行旋转。在反应结束之后,所述晶圆承载模块100旋转回预设姿态并移出所述反应腔101,从而在所述反应腔101外交接晶圆。在每次工艺开始或结束时,通过所述归位传感器104判断所述晶圆承载模块100是否旋转到预设姿态。
40.图2为图1中的半导体反应设备的a视角的放大图,如图2所示,所述反应腔101底部设置有磁流体102和旋转销103,所述磁流体102内开设有凹槽,所述旋转销103安装在所述凹槽内,当所述晶圆承载模块100旋转时,带动所述磁流体102与旋转销103旋转,所述归位传感器104通过判断所述旋转销103的位置间接判断所述晶圆承载模块100是否回到预设姿态。
41.图3为晶圆承载模块100位置异常时a视角的俯视图,如图3所示,由于所述磁流体102与所述旋转销103之间为活动连接,长时间使用会出现磨损,导致所述磁流体102与所述旋转销103之间出现缝隙,当所述晶圆承载模块100旋转时,所述磁流体102与所述旋转销103旋转角度不一致,导致出现所述归位传感器104感受到所述晶圆承载模块100已旋转到预设姿态,但实际上所述晶圆承载模块100还未到达预设姿态,如果此时进行晶圆110的传送,可能会出现晶圆110与所述晶圆承载模块100的碰撞,进而出现所述晶圆110掉落或破损的现象。
42.图4为晶圆承载模块100姿态正常时取放晶圆110的示意图,如图4所示,箭头所示方向为晶圆110取放的方向,当晶圆承载模块100处于预设姿态时,晶圆110通过所述晶圆承载模块100的开口进出所述晶圆承载模块100。图5为晶圆承载模块100姿态异常时取放晶圆110的示意图,如图5所示,箭头所示方向为晶圆110取放的方向,由于所述晶圆承载模块100的开口与所述晶圆110的尺寸差距小于6mm,当所述晶圆承载模块100未处于预设姿态时,所述晶圆110与所述晶圆承载模块100的支撑柱106及支撑脚108发生碰撞,进而出现所述晶圆110破损或脱落的现象。
43.下面将结合示意图对本发明的具体实施方式进行更详细的描述。根据下列描述,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
44.图6为本实施例提供的一种半导体反应设备的平面示意图,如图6所示,所述半导
体反应设备包括:反应腔、晶圆承载模块202、晶圆传递模块211以及至少一个位置检测模块。
45.具体的,所述反应腔固定在机架200上,所述机架200与所述晶圆传递模块211位于所述反应腔的异侧。所述晶圆承载模块202用于承载晶圆300,并通过移动在交接工位和反应工位之间切换,所述交接工位位于所述反应腔外,所述反应工位位于所述反应腔内。图7为本实施例提供的一种半导体反应设备的晶圆承载模块的正视图,如图7所示,所述晶圆承载模块202包括:至少两根支撑柱204及若干支撑脚206;所述支撑柱204沿垂向相对设置于所述晶圆承载模块202两侧,所述支撑柱204内壁上沿垂向设置有若干支撑脚206,形成若干用于存储晶圆300的且沿垂向分布的存储工位。在本实施例中,设置有三根支撑柱204,限制所述晶圆承载模块202开口方向的同时增加对所述晶圆300支撑的稳固性。
46.在本实施例中,所述晶圆承载模块202为晶舟,但不应以此为限。
47.所述晶圆承载模块202可在设定角度范围内旋转,在本实施例中所述晶圆承载模块202按照设定程序旋转,使所述晶圆承载模块202的开口方向朝向所述晶圆传递模块211的方向。
48.参阅图6,所述晶圆传递模块211包括:双叉式机械手208,包括若干沿垂向分布的双叉210,每个所述双叉210的表面均为一个所述交接工位,用于承载一个所述晶圆300,所述交接工位与所述存储工位一一对应,当所述晶圆承载模块202位于预设姿态时,所述交接工位可相所述存储工位一次性传递多个所述晶圆300,增加所述半导体反应设备的工作效率。
49.进一步的,所述位置检测模块包括:第一激光发送单元212a、激光接收单元214及第一阻挡单元216a,所述激光接收单元214设置于所述晶圆传递模块211上,所述第一激光发送单元212a位于所述机架200上,所述第一阻挡单元216a位于所述晶圆承载模块202上且位于所述第一激光发送单元212a及所述激光接收单元214之间。
50.所述晶圆承载模块202通过旋转改变位置,当所述晶圆承载模块202不处于预设姿态时,所述激光接收单元214与所述第一激光发送单元212a的中心共线,所述激光接收单元214接收所述第一激光发送单元212a发送的激光;当所述晶圆承载模块202处于预设姿态时,所述激光接收单元214、所述第一激光发送单元212a及所述第一阻挡单元216a的中心共线,所述第一阻挡单元216a阻挡所述第一激光发送单元212a发送的激光,此时,所述激光接收单元214无法接收到所述第一激光发送单元212a发送的激光。
51.继续参阅图6,在本实施例中,具有两个所述位置检测模块,且两个所述位置检测模块沿横向分布于所述晶圆承载模块202的两侧,进一步保证所述晶圆承载模块202的旋转至预设姿态。
52.图6为本实施例提供的一种半导体反应设备的晶圆承载模块的侧视图,如图6所示,由于在本实施例中,所述晶圆承载模块202具有多个所述存储工位,且所述晶圆传递模块211也具有多个与所述存储工位对应的传送工位,所述晶圆传递模块211与所述晶圆承载模块202在垂向上具有一定高度,所述位置检测模块还包括:至少一个第二激光发送单元212b及至少一个第二阻挡单元216b,所述第二激光发送单元212b位于所述机架200上,并与所述第一激光发送单元212a沿垂向对齐;所述第二阻挡单元216b位于所述晶圆承载模块202上,并与所述第一阻挡单元216a沿垂向对齐;所述第二激光发送单元212b和第二阻挡单
元216b沿横向分布于所述晶圆承载模块202的两侧,所述第一激光发送单元212a与所述第二激光发送单元212b之间沿垂向上距离等于所述第一阻挡单元216a与所述第二阻挡单元216b之间沿垂向上距离。
53.在本实施例中,设置两个所述第二激光发送单元212b与两个所述第二阻挡单元216b,所述第二激光发送单元212c与所述第二阻挡单元216c的位置关系如上所述,且所述第一激光发送单元212a与所述第二激光发送单元212b之间沿垂向上的距离不等于所述第一激光发送单元212a与所述第二激光发送单元212c之间沿垂向上的距离。
54.在本实施例中,由于所述第一阻挡单元216a、所述第二阻挡单元216b和所述第二阻挡单元216c位于所述晶圆承载模块202上,且所述晶圆承载模块202需要位于反应腔内进行反应,所以所述第一阻挡单元216a、所述第二阻挡单元216b和所述第二阻挡单元216c及所述晶圆承载模块202选用具有较好热物理性质及化学稳定性的石英玻璃。
55.进一步的,所述第一阻挡单元216a、所述第二阻挡单元216b和所述第二阻挡单元216c的外壁上涂布有碳化硅涂层,碳化硅具有良好的热物理性质及不透光性,保证在所述反应腔内性质稳定的同时可以有效阻挡所述第一激光发送单元212a、第二激光发送单元212b和所述第二激光发送单元212c发送的激光。另外,由于石英玻璃具有能透过紫外线的性质,所述第一激光发送单元212a、第二激光发送单元212b和所述第二激光发送单元212c选用紫外激光发送器,避免所述第一激光发送单元212a、第二激光发送单元212b和所述第二激光发送单元212c发出的激光被所述晶圆承载模块202阻拦而影响所述激光接收单元214对激光的接收。
56.所述晶圆传递模块211携带所述激光接收单元214进行上下移动,与所述第一激光发送单元212a、第二激光发送单元212b和所述第二激光发送单元212c分别对齐,通过判断所述激光接收单元214对激光的接收情况判断所述晶圆承载模块202是否处于预设姿态上。
57.在其它可选实施例中,可设置一个所述位置检测模块;或设置多个所述第二阻挡单元216b和所述第二激光发送单元212b,进行多次对准,进一步避免在所述晶圆300在传递过程中发生掉落或破损的现象。
58.所述半导体反应设备还包括:第一计数器和第二计数器,所述第一计数器设置于所述激光接收单元214内,所述第二计数器设置于所述晶圆承载模块202内;所述第一计数器在所述激光接收单元接收214到的激光中断时计数一次,当所述第一计数器计数大于第一设定值,所述晶圆承载模块202再次按照设定程序旋转,且所述第二计数器计数一次,当所述第二计数器大于第二设定值,报警提醒。
59.图9为本实施例提供的一种半导体反应设备的位置校准的方法的流程图,如图9所示,本发明还提供一种半导体反应设备的位置校准的方法,包括:
60.步骤s1:第一激光发送单元发出激光,将第一激光发送单元与激光接收单元对准;
61.步骤s2:将晶圆承载模块移动至交接工位;
62.步骤s3:根据所述激光接收单元的检测结果判定所述晶圆承载模块是否处于预设姿态,当处于预设姿态时,晶圆传递模块向所述晶圆承载模块传递晶圆。
63.具体的,图10为本实施例提供的一种晶圆承载模块202位置校准方法的程序图,如图10所示,执行步骤s1:第一激光发送单元212a发出激光,将第一激光发送单元212a与激光接收单元214对准。
64.当所述晶圆承载模块202每次工艺开始或结束时,所述第一激光发送单元212a发出激光,所述晶圆传递模块211移动使所述激光接收单元214接收到所述第一激光发送单元212a发送的激光,记录此位置为初始位置,所述第一计数器计数清零并关闭所述激光接收单元214。
65.执行步骤s2:将晶圆承载模块202移动至交接工位。
66.所述晶圆承载模块202上升至交接工位并按照预设程序旋转至设定姿态,所述激光接收单元214打开开始接收激光,所述第二激光发送单元212b和第二激光发送单元212c打开发送激光,若所述晶圆承载模块202的设定姿态与预设姿态一致,所述第一阻挡单元216a完全阻挡所述第一激光发送单元212a发送的激光,所述激光接收单元214没有接收到激光;若所述晶圆承载模块202的设定姿态与预设姿态不一致,所述第一阻挡单元216a不能阻挡所述第一激光发送单元212a发送的激光,所述激光接收单元214接收到激光。
67.进一步的,所述晶圆传递模块211开始沿垂向移动,若在移动过程中,所述激光接收单元214接收到的所述第一激光发送单元212a所发送的激光中断,则所述第一计数器计数一次;若所述激光接收单元214的接收状态没有改变,则所述第一计数器不计数。同理,在所述晶圆传递模块211沿垂向运动过程中,所述激光接收单元214接收到所述第二激光发送单元212b或所述第二激光发送单元212c发出的激光并断开,则所述第一计数器计数一次,否则所述第一计数器不计数。当所述晶圆传递模块211移动距离等于所述晶圆承载模块202沿垂向的高度后,所述第一激光发送单元212a、所述第二激光发送单元212b和第二激光发送单元212c停止发送激光,所述晶圆传递模块211回到初始位置。
68.执行步骤s3,根据所述激光接收单元214的检测结果判定所述晶圆承载模块202是否处于预设姿态,当处于预设姿态时,所述晶圆传递模块211向所述晶圆承载模块202传递晶圆300。
69.所述晶圆传递模块211移动结束后判断所述第一计数器的计数是否大于第一预设值,在本实施例中,所述第一预设值为0,若所述接收计数器计数大于0,表明所述晶圆承载模块202未处于预设姿态,第二计数器计数一次,并重新开始执行步骤s1;若所述第一计数器计数等于0,表明所述晶圆承载模块202处于预设姿态,第二计数器计数清零,并继续执行步骤s3。
70.其中,所述晶圆传递模块211内还包括报警器,若所述第二计数器计数大于第二预设值,所述报警器向工作人员报警器报警提醒。在本实施例中,所述第二预设值为3。
71.在其它可选实施例中,应根据所述第二激光发送单元212b数量相应改变所述第一预设值。
72.继续执行步骤s3,所述晶圆传递模块211横向移动,向所述晶圆承载模块202传递晶圆300。
73.综上,在本发明提供所述半导体反应设备包括反应腔、晶圆承载模块202、晶圆传递模块211及至少一个位置检测模块;所述晶圆承载模块202用于承载晶圆300,并通过移动在交接工位和反应工位之间切换;所述位置检测模块包括第一激光发送单元212a、激光接收单元214及第一阻挡单元216a;所述晶圆承载模块202位于所述交接工位上时,所述第一激光发送单元212a、所述激光接收单元214及所述第一阻挡单元216a对准,根据所述激光接收单元214的检测结果判定所述晶圆承载模块202是否处于预设姿态,保证每次工艺开始和
结束后,所述晶圆承载模块212回到预设姿态再进行晶圆300传递,避免晶圆300传送时发生晶圆300掉落或破损的现象。并通过设置所述第二激光发送单元216b与所述第二阻挡单元216b进一步确定所述晶圆承载模块202处于预设姿态。
74.上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。