技术特征:
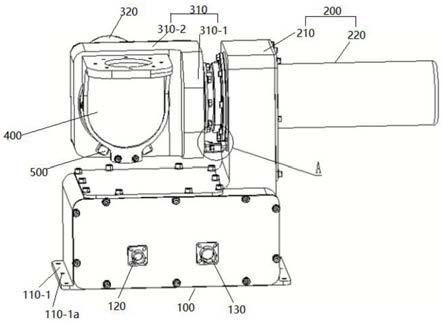
1.一种智能实时调平装置,其特征在于,包括:底座(100),包括壳体(110)、分别设置在壳体(110)外侧端面的电源插座(120)和通信插座(130)以及设置在壳体(110)内部的控制器(140)、电机驱动单元(150)、倾角仪(160)和稳压电源(170),所述控制器(140)、电机驱动单元(150)和电源插座(120)分别与稳压电源(170)电性连接;横摇机构(200),包括安装于壳体(110)顶端且与壳体(110)一体式铸造的横摇支架(210)、位于横摇支架(210)的外侧且与横摇支架(210)贯通的横摇轴套筒(220)以及位于横摇轴套筒(220)内的横摇组件(230),所述横摇组件(230)包括由外向内依次连接的横摇编码器(230
‑
1)、横摇伺服电机(230
‑
2)和横摇减速机(230
‑
3),所述横摇伺服电机(230
‑
2)为双轴伸电机,其中一个输出轴与横摇编码器(230
‑
1)连接,另一个输出轴与横摇减速机(230
‑
3)的输入端连接,所述横摇减速机(230
‑
3)的横摇输出轴(230
‑
3a)向内延伸到横摇支架(210)的内空腔体内;纵摇机构(300),包括安装于壳体(110)上方的纵摇支架(310)、位于纵摇支架(310)外侧且与纵摇支架(310)贯通的纵摇轴套筒(320)以及位于纵摇轴套筒(320)内的纵摇组件(330),所述纵摇支架(310)包括与横摇支架(210)平行设置的第一连接部(310
‑
1)以及与第一连接部(310
‑
1)一端部垂直设置的第二连接部(310
‑
2),所述纵摇组件(330)包括由外向内依次连接的纵摇编码器(330
‑
1)、纵摇伺服电机(330
‑
2)和纵摇减速机(330
‑
3),所述纵摇伺服电机(330
‑
2)为双轴伸电机,其中一个输出轴与纵摇编码器(330
‑
1)固定连接,另一个输出轴与纵摇减速机(330
‑
3)的输入端固定连接,所述纵摇减速机(330
‑
3)的纵摇输出轴向内延伸到第二连接部(210
‑
2)的内空腔体内;所述横摇机构(200)还包括安装在第一连接部(310
‑
1)靠近横摇支架(210)的一端外壁上的横摇连接轴(240),所述横摇连接轴(240)的另一端贯穿横摇支架(210)的外壁与横摇减速机(230
‑
3)的横摇输出轴(230
‑
3a)连接;负载安装平台(400),位于壳体(110)的上方且第二连接部(310
‑
2)的内侧外壁,其顶端开设有第一安装孔(410),所述负载安装平台(400)与第二连接部(310
‑
2)以及第一连接部(310
‑
1)与横摇支架(210)之间均通过法兰连接;所述纵摇机构(300)还包括安装在所述负载安装平台(400)靠近第二连接部(310
‑
2)一端外壁上的纵摇连接轴,所述纵摇连接轴的另一端贯穿第二连接部(310
‑
2)的外壁与纵摇减速机(330
‑
3)的纵摇输出轴连接;其中,所述横摇编码器(230
‑
1)、纵摇编码器(330
‑
1)、倾角仪(160)和通信插座(130)分别通过导线与控制器(140)的输入端相连,所述横摇伺服电机(230
‑
2)和纵摇伺服电机(330
‑
2)分别通过导线与控制器(140)的输出端相连。2.根据权利要求1所述的一种智能实时调平装置,其特征在于,还包括机械限位机构(500),所述机械限位机构(500)包括:横摇限位组件(510),位于横摇支架(210)与纵摇支架(310)之间,包括安装在第一连接部(210
‑
1)外壁上的第一限位杆(510
‑
1)以及两块对称设置在横摇支架(210)外壁上的第一限位块(510
‑
2);其中,当横摇组件(230)带动纵摇支架(310)运动时,使第一限位杆(510
‑
1)在两块第一限位块(510
‑
2)之间摆动;
纵摇限位组件(520),位于纵摇支架(310)与负载安装平台(400)之间,包括安装在负载安装平台(400)外侧壁上的第二限位杆(520
‑
1)以及两块对称设置在第二连接部(210
‑
2)外壁上的第二限位块(520
‑
2);其中,当纵摇组件(330)带动负载安装平台(400)运动时,使第二限位杆(520
‑
1)在两块第二限位块(520
‑
2)之间摆动。3.根据权利要求1所述的一种智能实时调平装置,其特征在于:所述控制器(140)包括相交互的fpga芯片和dsp芯片,所述横摇编码器(230
‑
1)、纵摇编码器(330
‑
1)以及倾角仪(160)均通过串口芯片与fpga芯片的输入端相连,所述横摇伺服电机(230
‑
2)和纵摇伺服电机(330
‑
2)分别通过横摇电机驱动单元和纵摇电机驱动单元与dsp芯片的输出端相连。4.根据权利要求1所述的一种智能实时调平装置,其特征在于:所述第一连接部(310
‑
1)与横摇支架(210)之间连接有第一轴承组件,所述第一轴承组件包括与横摇连接轴(240)的轴肩连接的第一轴承内圈(610),通过第一轴承衬套(620)与横摇支架(210)外壁连接的第一轴承外圈,通过横摇连接轴(240)的轴肩定位到横摇减速机(230
‑
3)的横摇输出轴(230
‑
3a)上的第一轴承内圈压板(630)以及与横摇支架(210)外壁连接的第一轴承外圈压板(640);所述第二连接部(310
‑
2)与负载安装平台(400)之间连接有第二轴承组件,所述第二轴承组件包括与纵摇连接轴的轴肩连接的第二轴承内圈,通过第二轴承衬套与第二连接部(310
‑
2)外壁连接的第二轴承外圈,通过纵摇连接轴的轴肩定位到纵摇减速机(330
‑
3)的纵摇输出轴上的第二轴承内圈压板以及与第二连接部(310
‑
2)外壁连接的第二轴承外圈压板。5.根据权利要求1所述的一种智能实时调平装置,其特征在于:所述壳体(110)左右两端内部均横向对齐设置有导轨,所述导轨上滑动连接有器件安装板(180),所述控制器(140)和倾角仪(160)安装于器件安装板(180)上。6.根据权利要求1所述的一种智能实时调平装置,其特征在于:所述壳体(110)的底部外壁的两端向外水平延伸形成安装固定板(110
‑
1),所述安装固定板(110
‑
1)的顶端设置有贯穿至安装固定板(110
‑
1)底端的第二安装孔(110
‑
1a)。7.根据权利要求1所述的一种智能实时调平装置,其特征在于:所所述壳体(110)、横摇支架(210)、横摇轴套筒(220)、纵摇支架(310)和纵摇轴套筒(320)的外表面均喷涂有防腐蚀涂层。8.根据权利要求1所述的一种智能实时调平装置,其特征在于:所述横摇编码器(230
‑
1)和纵摇编码器(330
‑
1)均为绝对式旋转编码器。9.根据权利要求1至8任一项所述的一种智能实时调平装置的控制方法,其特征在于,包括如下步骤:1)指令接受:控制器(140)通过rs422串口或网口接收上位机指令;2)数据采集:横摇编码器(230
‑
1)、纵摇编码器(330
‑
1)以及倾角仪(160)采集的船摇角度和速度数据传输到控制器(140);3)算法实现:控制器(140)根据接收到的目标角度和当前角度、速度,对横摇伺服电机(230
‑
2)和纵摇伺服电机(330
‑
2)进行算法控制;4)电机驱动:控制器(140)分别控制横摇电机驱动单元和纵摇电机驱动单元,从而控制
横摇伺服电机(230
‑
2)和纵摇伺服电机(330
‑
2),控制器(140)完成横摇伺服电机(230
‑
2)和纵摇伺服电机(330
‑
2)位置环闭环控制,电机驱动单元(150)完成速度环和电流环闭环控制,实现负载安装平台(400)的调平;5)全自动监测:上位机软件通过接入通信插座(130)进行远程控制,通过状态监控功能,实时显示调平状态。10.根据权利要求9所述的一种智能实时调平装置的控制方法,其特征在于:所述步骤3)中算法控制为复合pi算法控制,包括如下步骤:1)根据调平装置工作原理,确定伺服系统原理框图;2)复合控制设计;所述复合pi算法控制为基于前馈补偿和pi相结合的复合控制策略,2
‑
1)求前馈输出信号u
f
(s)为,式中,y
d
(s)为目标角度信号,g(s)为传递函数;2
‑
2)求前馈补偿控制器总控制输出u(s)为,u(s)=u
p
(s) u
f
(s)
ꢀꢀꢀ
(2)式中,u
p
(s)为pid控制输出,u
f
(s)为前馈控制输出;2
‑
3)将控制器总控制输出u(s)写成离散形式u(k),u(k)=u
p
(k) u
f
(k)
ꢀꢀꢀ
(3)式中,u
p
(k)为pi控制器输出,u
f
(k)为馈控制输出;2
‑
4)将目标角度r(k)与当前角度y(k)比较得到目标角度与当前角度的差值e(k),差值e(k)作pi运算得到pi控制器输出u
p
(k),加上倾角仪测得的当前船摇速度v(k)作为电机驱动单元(150)的输入信号,电机驱动单元(150)完成伺服控制的速度环和电流环控制再驱动横摇伺服电机(230
‑
2)和纵摇伺服电机(330
‑
2)动作。
技术总结
本发明公开了一种智能实时调平装置及其控制方法,包括底座和位于底座上方的横摇机构、纵摇机构、负载安装平台。底座内安装有控制装置,横摇机构包括安装于壳体顶端且与壳体一体式铸造的横摇支架、位于横摇支架的外侧且与横摇支架贯通的横摇轴套筒以及位于横摇轴套筒内的横摇组件,纵摇机构包括安装于壳体上方的纵摇支架、位于纵摇支架外侧且与纵摇支架贯通的纵摇轴套筒以及位于纵摇轴套筒内的纵摇组件。通过横摇编码器和纵摇编码器将采集到的倾斜角度分别传输到控制器,控制器分别控制横摇伺服电机和纵摇伺服电机运转,使整体横摇组件所在的横摇轴和整体纵摇组所在的纵摇轴达到指定位置,从而带动纵摇支架运动,最终实现负载安装平台的调平。负载安装平台的调平。负载安装平台的调平。
技术研发人员:李唐 王立慧 徐曼 马定奎 桑锐
受保护的技术使用者:南京工业职业技术大学
技术研发日:2021.09.08
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。