1.本发明属于机械手领域,具体的说是一种龙门多轴桁架码垛机械手。
背景技术:
2.随着生产自动化意识的提升,工厂对自动化码垛的需求越来越高,目前物件的码垛普遍采用人工方式手动码垛,即使有小部分物件采用机器码垛,但码垛效率低下,需要人工配合放置各个物件,费时、费力、效率不高。
3.现有的码垛机器通常用来搬运码垛面粉袋,水泥袋等重量较大的物体,这就导致机器的功率较大,用来码垛的机械手握力较大,一旦用来搬运较为脆弱的物体,很容易在搬运过程中对物体造成损伤,如搬运木板时,木板外表面被机械手划损,搬运塑料板时,机械手握力过大导致塑料板变形断裂。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种龙门多轴桁架码垛机械手,解决了机械手在搬运较为脆弱的物体容易对物体造成损伤的问题。
5.本发明解决其技术问题所采用的技术方案是:本发明所述的一种龙门多轴桁架码垛机械手,包括水平控制器,所述水平控制器的下表面固定连接有堆放台,所述堆放台的两侧对称设置有流水线固定框,所述流水线固定框的内壁固定连接有斜向传送装置,所述斜向传送装置外表面的一侧固定连接有转动收缩机;优选的,所述斜向传送装置包括回转伸缩臂,所述回转伸缩臂的底端固定连接有机械爪,所述机械爪的下方设置有限位挡板,所述限位挡板的上表面对称设置有间隔条板,所述限位挡板上表面的中部滑动连接有弹性升降板,所述限位挡板的右侧固定连接有传动带,使用该装置码垛物体时,加工后的板状体经过传动带的传送滑到弹性升降板的上表面,弹性升降板受到压力后下降。
6.优选的,所述回转伸缩臂外表面的上部通过滑槽与堆放台内腔的上部滑动连接,所述回转伸缩臂的顶端通过导线与水平控制器的内腔固定连接,所述限位挡板外表面的两侧与堆放台的内壁固定连接,所述弹性升降板下外表面通过负重弹簧与限位挡板的上表面固定连接,所述传动带的右端与流水线固定框的内壁转动连接,水平控制器控制两侧的回转伸缩臂转动,回转伸缩臂伸长,此时转动收缩机控制机械爪,插进间隔条板的间隙中,随后回转伸缩臂缩短,机械爪将放置在弹性升降板上表面的板状体抬起,进行搬运码垛工作。
7.优选的,所述转动收缩机包括转动电机,所述转动电机的内壁转动连接有引导转杆,转动电机在转动时,通过卡槽控制两侧的引导转杆进行自转,所述引导转杆外表面的两端固定连接有插接套筒,所述插接套筒内壁的一侧套接有控制转杆,所述控制转杆的一端延伸至机械爪的内部,所述控制转杆外表面的右端通过转孔与机械爪的内腔转动连接,在保证机械爪正常工作的同时,转动收缩机会随着机械爪进行竖直移动。
8.优选的,所述机械爪包括固定壳,所述固定壳内腔的两侧均匀开设有贯穿插口,所
述固定壳内腔的两侧通过贯穿插口固定连接有引导条形框,所述引导条形框的内壁滑动连接有侧爪,所述固定壳内腔的一侧通过转孔与控制转杆外表面的一端转动连接,所述控制转杆的外表面固定连接有椭圆推块,控制转杆转动时,椭圆推块随着控制转杆进行自转。
9.优选的,所述控制转杆的一端与固定壳内壁的一侧转动连接,所述椭圆推块的外表面与固定壳的内壁滑动连接,所述侧爪的左端延伸至引导条形框的外部,所述侧爪外表面的左端与椭圆推块的外表面滑动连接。
10.优选的,所述椭圆推块包括椭圆基块,所述椭圆基块内腔的两端均开设有空心槽,所述椭圆基块内腔的两端滑动连接有凸起插头,所述凸起插头的底端通过连接弹簧与椭圆基块的内腔固定连接,所述凸起插头外表面的一端与固定壳内壁的内壁活动连接,所述凸起插头的顶端通过凹槽与侧爪外表面的左端活动连接,当椭圆基块位置水平时,椭圆基块两端的凸起插头与水平推条左侧的插槽插接卡紧,水平推条被向外推动,侧爪为抓物状态,当椭圆基块为竖直状态时,侧爪为放松状态侧爪能够将搬运的物体放下。
11.优选的,所述侧爪包括水平推条,所述水平推条的左端开设有适配凹槽,所述水平推条的左端通过适配凹槽固定连接有回转条,所述水平推条的右端转动连接有中转轴,所述水平推条的右端通过中转轴转动连接有转动勾爪。
12.优选的,所述侧爪包括牵引杆,所述转动勾爪的内腔开设有轨迹槽,所述牵引杆的右端通过轨迹槽与转动勾爪的内腔滑动连接,所述转动勾爪外表面的左侧通过弹簧槽滑动连接有尖条,所述尖条的上表面固定连接有缓冲带,水平推条被向外推动时,水平推条的右端推动转动勾爪的顶端向右运动。
13.优选的,所述水平推条的外表面与引导条形框的内壁滑动连接,所述牵引杆上表面的左侧与固定壳的下表面固定连接,所述缓冲带的底端与尖条的内腔固定连接,所述缓冲带的顶端与转动勾爪外表面的左侧固定连接,转动勾爪在牵引杆的限制作用下,其底端向左运动,使转动勾爪向内弯曲变形,此时尖条的上表面保持水平,向上拉动机械爪,复数的尖条将需要搬运的物体抬起。
14.本发明的有益效果如下:1.该装置采用多轴设计,所以该装置在码垛时,可以同时对两边传动带传动过来的板状体进行码垛工作,进而有效提高码垛效率,进一步提高生产效率。
15.2.该装置结构简单,通过水平控制器对回转伸缩臂的控制作用,保证机械爪能够在堆放台内部进行自由运动,转动收缩机在控制机械爪状态时,不会对机械爪的移动起到限制作用,水平控制器与转动收缩机各自起到独立运动的效果,简化了装置设计的难度。
16.3.机械爪间隔条板的间隙处插入进行搬运起手动作,可以有效减轻机械爪在搬运物体时,其尖端部分对物体外表面造成的划损,进而保证产品的良品率。
17.4.该装置由传统的夹接式搬运优化为抬举式搬运,有效避免了机械爪握力较大,在夹紧物体搬运时机械爪用力过度导致物体被夹坏的不良现象。
18.5.在夹紧搬运物体时,为了防止侧爪发生松动,椭圆推块两端的凸起插头与水平推条凹槽内部的回转条卡接,此时椭圆推块与侧爪的连接处间隙有效减少,侧爪的定位更加稳定。
19.6.如果搬运的物体过重,尖条就与在压力的作用下变形,长久工作后,机械爪在闭合状态下,尖条将无法保证水平状态,所搬运的物体就有脱落的风险,所以尖条在转动勾爪
上活动安装,在搬运较重物体时,尖条略微下滑,弹簧与缓冲带承受大部分重力,防止尖条弯曲形变。
附图说明
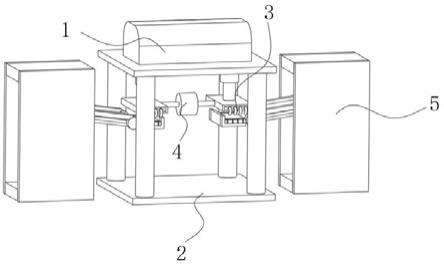
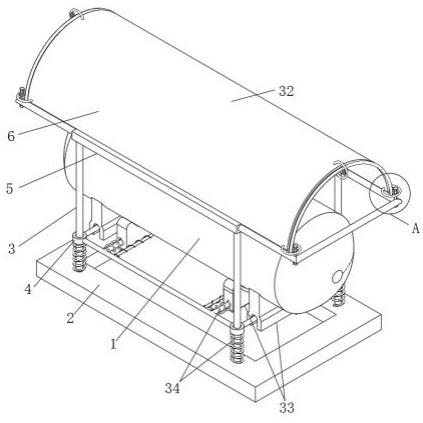
20.图1是本发明的主视图;图2是本发明斜向传送装置的结构示意图;图3是本发明转动收缩机的结构示意图;图4是本发明机械爪的剖视图;图5是本发明椭圆推块的结构示意图;图6是本发明侧爪的结构示意图。
21.图中:水平控制器1,堆放台2,斜向传送装置3,转动收缩机4,流水线固定框5,回转伸缩臂31,传动带32,限位挡板33,弹性升降板34,间隔条板35,转动电机41,引导转杆42,插接套筒43,控制转杆44,机械爪6,固定壳61,引导条形框62,椭圆推块7,椭圆基块71,凸起插头72,侧爪8,水平推条81,回转条82,转动勾爪83,牵引杆84,缓冲带85,尖条86。
具体实施方式
22.使用图1
‑
图6对本发明一实施方式的一种龙门多轴桁架码垛机械手进行如下说明。
23.如图1
‑
图6所示,本发明所述的一种龙门多轴桁架码垛机械手,包括水平控制器1,所述水平控制器1的下表面固定连接有堆放台2,所述堆放台2的两侧对称设置有流水线固定框5,所述流水线固定框5的内壁固定连接有斜向传送装置3,所述斜向传送装置3外表面的一侧固定连接有转动收缩机4,该装置结构简单,通过水平控制器1对回转伸缩臂31的控制作用,保证机械爪6能够在堆放台2内部进行自由运动,转动收缩机4在控制机械爪6状态时,不会对机械爪6的移动起到限制作用,水平控制器1与转动收缩机4各自起到独立运动的效果,简化了装置设计的难度。
24.所述斜向传送装置3包括回转伸缩臂31,所述回转伸缩臂31的底端固定连接有机械爪6,所述机械爪6的下方设置有限位挡板33,所述限位挡板33的上表面对称设置有间隔条板35,所述限位挡板33上表面的中部滑动连接有弹性升降板34,所述限位挡板33的右侧固定连接有传动带32,使用该装置码垛物体时,加工后的板状体经过传动带32的传送滑到弹性升降板34的上表面,弹性升降板34受到压力后下降,机械爪6间隔条板35的间隙处插入进行搬运起手动作,可以有效减轻机械爪6在搬运物体时,其尖端部分对物体外表面造成的划损,进而保证产品的良品率。
25.所述回转伸缩臂31外表面的上部通过滑槽与堆放台2内腔的上部滑动连接,所述回转伸缩臂31的顶端通过导线与水平控制器1的内腔固定连接,所述限位挡板33外表面的两侧与堆放台2的内壁固定连接,所述弹性升降板34下外表面通过负重弹簧与限位挡板33的上表面固定连接,所述传动带32的右端与流水线固定框5的内壁转动连接,水平控制器1控制两侧的回转伸缩臂31转动,回转伸缩臂31伸长,此时转动收缩机4控制机械爪6,插进间隔条板35的间隙中,随后回转伸缩臂31缩短,机械爪6将放置在弹性升降板34上表面的板状体抬起,进行搬运码垛工作。
26.所述转动收缩机4包括转动电机41,所述转动电机41的内壁转动连接有引导转杆42,转动电机41在转动时,通过卡槽控制两侧的引导转杆42进行自转,所述引导转杆42外表面的两端固定连接有插接套筒43,所述插接套筒43内壁的一侧套接有控制转杆44,所述控制转杆44的一端延伸至机械爪6的内部,所述控制转杆44外表面的右端通过转孔与机械爪6的内腔转动连接,在保证机械爪6正常工作的同时,转动收缩机4会随着机械爪6进行竖直移动,转动收缩机4在控制机械爪6状态时,不会对机械爪6的移动起到限制作用,水平控制器1与转动收缩机4各自起到独立运动的效果,简化了装置设计的难度。
27.所述机械爪6包括固定壳61,所述固定壳61内腔的两侧均匀开设有贯穿插口,所述固定壳61内腔的两侧通过贯穿插口固定连接有引导条形框62,所述引导条形框62的内壁滑动连接有侧爪8,所述固定壳61内腔的一侧通过转孔与控制转杆44外表面的一端转动连接,所述控制转杆44的外表面固定连接有椭圆推块7,控制转杆44转动时,椭圆推块7随着控制转杆44进行自转,该装置由传统的夹接式搬运优化为抬举式搬运,有效避免了机械爪6握力较大,在夹紧物体搬运时机械爪6用力过度导致物体被夹坏的不良现象。
28.所述控制转杆44的一端与固定壳61内壁的一侧转动连接,所述椭圆推块7的外表面与固定壳61的内壁滑动连接,所述侧爪8的左端延伸至引导条形框62的外部,所述侧爪8外表面的左端与椭圆推块7的外表面滑动连接。
29.所述椭圆推块7包括椭圆基块71,所述椭圆基块71内腔的两端均开设有空心槽,所述椭圆基块71内腔的两端滑动连接有凸起插头72,所述凸起插头72的底端通过连接弹簧与椭圆基块71的内腔固定连接,所述凸起插头72外表面的一端与固定壳61内壁的内壁活动连接,所述凸起插头72的顶端通过凹槽与侧爪8外表面的左端活动连接,当椭圆基块71位置水平时,椭圆基块71两端的凸起插头72与水平推条81左侧的插槽插接卡紧,水平推条81被向外推动,侧爪8为抓物状态,当椭圆基块71为竖直状态时,侧爪8为放松状态侧爪8能够将搬运的物体放下,在夹紧搬运物体时,为了防止侧爪8发生松动,椭圆推块7两端的凸起插头72与水平推条81凹槽内部的回转条82卡接,此时椭圆推块7与侧爪8的连接处间隙有效减少,侧爪8的定位更加稳定。
30.所述侧爪8包括水平推条81,所述水平推条81的左端开设有适配凹槽,所述水平推条81的左端通过适配凹槽固定连接有回转条82,所述水平推条81的右端转动连接有中转轴,所述水平推条81的右端通过中转轴转动连接有转动勾爪83。
31.所述侧爪8包括牵引杆84,所述转动勾爪83的内腔开设有轨迹槽,所述牵引杆84的右端通过轨迹槽与转动勾爪83的内腔滑动连接,所述转动勾爪83外表面的左侧通过弹簧槽滑动连接有尖条86,所述尖条86的上表面固定连接有缓冲带85,水平推条81被向外推动时,水平推条81的右端推动转动勾爪83的顶端向右运动。
32.所述水平推条81的外表面与引导条形框62的内壁滑动连接,所述牵引杆84上表面的左侧与固定壳61的下表面固定连接,所述缓冲带85的底端与尖条86的内腔固定连接,所述缓冲带85的顶端与转动勾爪83外表面的左侧固定连接,转动勾爪83在牵引杆84的限制作用下,其底端向左运动,使转动勾爪83向内弯曲变形,此时尖条86的上表面保持水平,向上拉动机械爪6,复数的尖条86将需要搬运的物体抬起,如果搬运的物体过重,尖条86就与在压力的作用下变形,长久工作后,机械爪6在闭合状态下,尖条86将无法保证水平状态,所搬运的物体就有脱落的风险,所以尖条86在转动勾爪83上活动安装,在搬运较重物体时,尖条
86略微下滑,弹簧与缓冲带85承受大部分重力,防止尖条86弯曲形变。
33.具体工作流程如下:使用该装置码垛物体时,加工后的板状体经过传动带32的传送滑到弹性升降板34的上表面,弹性升降板34受到压力后下降,随后水平控制器1控制两侧的回转伸缩臂31转动,回转伸缩臂31伸长,此时转动收缩机4控制机械爪6,插进间隔条板35的间隙中,随后回转伸缩臂31缩短,机械爪6将放置在弹性升降板34上表面的板状体抬起,进行搬运码垛工作。
34.由于该装置采用多轴设计,所以该装置在码垛时,可以同时对两边传动带32传动过来的板状体进行码垛工作,进而提高码垛效率。
35.转动电机41在转动时,通过卡槽控制两侧的引导转杆42进行自转,进而控制机械爪6的取出与放下两种工作状态,在保证机械爪6正常工作的同时,转动收缩机4会随着机械爪6进行竖直移动。
36.控制转杆44转动时,椭圆基块71随着控制转杆44进行自转,当椭圆基块71位置水平时,椭圆基块71两端的凸起插头72与水平推条81左侧的插槽插接卡紧,水平推条81被向外推动,侧爪8为抓物状态,当椭圆基块71为竖直状态时,侧爪8为放松状态侧爪8能够将搬运的物体放下。
37.水平推条81被向外推动时,水平推条81的右端推动转动勾爪83的顶端向右运动,而转动勾爪83在牵引杆84的限制作用下,其底端向左运动,使转动勾爪83向内弯曲变形,此时尖条86的上表面保持水平,向上拉动机械爪6,复数的尖条86将需要搬运的物体抬起。
38.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。