技术特征:
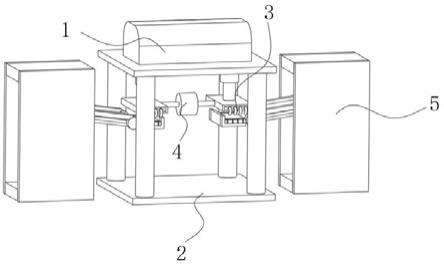
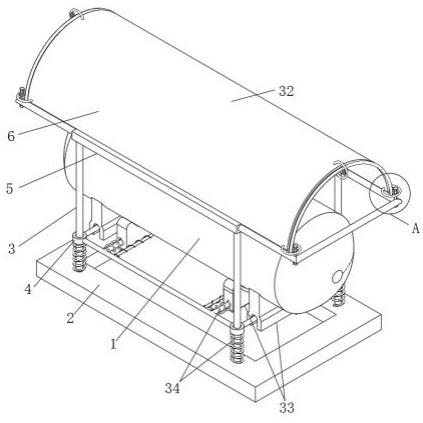
1.一种龙门多轴桁架码垛机械手,包括水平控制器(1),其特征在于:所述水平控制器(1)的下表面固定连接有堆放台(2),所述堆放台(2)的两侧对称设置有流水线固定框(5),所述流水线固定框(5)的内壁固定连接有斜向传送装置(3),所述斜向传送装置(3)外表面的一侧固定连接有转动收缩机(4);所述斜向传送装置(3)包括回转伸缩臂(31),所述回转伸缩臂(31)的底端固定连接有机械爪(6),所述机械爪(6)的下方设置有限位挡板(33),所述限位挡板(33)的上表面对称设置有间隔条板(35),所述限位挡板(33)上表面的中部滑动连接有弹性升降板(34),所述限位挡板(33)的右侧固定连接有传动带(32)。2.根据权利要求1所述的一种龙门多轴桁架码垛机械手,其特征在于:所述回转伸缩臂(31)外表面的上部通过滑槽与堆放台(2)内腔的上部滑动连接,所述回转伸缩臂(31)的顶端通过导线与水平控制器(1)的内腔固定连接,所述限位挡板(33)外表面的两侧与堆放台(2)的内壁固定连接,所述弹性升降板(34)下外表面通过负重弹簧与限位挡板(33)的上表面固定连接,所述传动带(32)的右端与流水线固定框(5)的内壁转动连接。3.根据权利要求1所述的一种龙门多轴桁架码垛机械手,其特征在于:所述转动收缩机(4)包括转动电机(41),所述转动电机(41)的内壁转动连接有引导转杆(42),所述引导转杆(42)外表面的两端固定连接有插接套筒(43),所述插接套筒(43)内壁的一侧套接有控制转杆(44),所述控制转杆(44)的一端延伸至机械爪(6)的内部,所述控制转杆(44)外表面的右端通过转孔与机械爪(6)的内腔转动连接。4.根据权利要求1所述的一种龙门多轴桁架码垛机械手,其特征在于:所述机械爪(6)包括固定壳(61),所述固定壳(61)内腔的两侧均匀开设有贯穿插口,所述固定壳(61)内腔的两侧通过贯穿插口固定连接有引导条形框(62),所述引导条形框(62)的内壁滑动连接有侧爪(8),所述固定壳(61)内腔的一侧通过转孔与控制转杆(44)外表面的一端转动连接,所述控制转杆(44)的外表面固定连接有椭圆推块(7)。5.根据权利要求4所述的一种龙门多轴桁架码垛机械手,其特征在于:所述控制转杆(44)的一端与固定壳(61)内壁的一侧转动连接,所述椭圆推块(7)的外表面与固定壳(61)的内壁滑动连接,所述侧爪(8)的左端延伸至引导条形框(62)的外部,所述侧爪(8)外表面的左端与椭圆推块(7)的外表面滑动连接。6.根据权利要求4所述的一种龙门多轴桁架码垛机械手,其特征在于:所述椭圆推块(7)包括椭圆基块(71),所述椭圆基块(71)内腔的两端均开设有空心槽,所述椭圆基块(71)内腔的两端滑动连接有凸起插头(72),所述凸起插头(72)的底端通过连接弹簧与椭圆基块(71)的内腔固定连接,所述凸起插头(72)外表面的一端与固定壳(61)内壁的内壁滑动连接,所述凸起插头(72)的顶端通过凹槽与侧爪(8)外表面的左端滑动连接。7.根据权利要求6所述的一种龙门多轴桁架码垛机械手,其特征在于:所述侧爪(8)包括水平推条(81),所述水平推条(81)的左端开设有适配凹槽,所述水平推条(81)的左端通过适配凹槽固定连接有回转条(82),所述水平推条(81)的右端转动连接有中转轴,所述水平推条(81)的右端通过中转轴转动连接有转动勾爪(83)。8.根据权利要求7所述的一种龙门多轴桁架码垛机械手,其特征在于:所述侧爪(8)包括牵引杆(84),所述转动勾爪(83)的内腔开设有轨迹槽,所述牵引杆(84)的右端通过轨迹槽与转动勾爪(83)的内腔滑动连接,所述转动勾爪(83)外表面的左侧通过弹簧槽滑动连接
有尖条(86),所述尖条(86)的上表面固定连接有缓冲带(85)。9.根据权利要求8所述的一种龙门多轴桁架码垛机械手,其特征在于:所述水平推条(81)的外表面与引导条形框(62)的内壁滑动连接,所述牵引杆(84)上表面的左侧与固定壳(61)的下表面固定连接,所述缓冲带(85)的底端与尖条(86)的内腔固定连接,所述缓冲带(85)的顶端与转动勾爪(83)外表面的左侧固定连接。
技术总结
本发明属于机械手领域,具体的说是一种龙门多轴桁架码垛机械手,包括水平控制器,所述水平控制器的下表面固定连接有堆放台,所述堆放台的两侧对称设置有流水线固定框,所述流水线固定框的内壁固定连接有斜向传送装置,所述斜向传送装置外表面的一侧固定连接有转动收缩机。该装置采用多轴设计,所以该装置在码垛时,可以同时对两边传动带传动过来的板状体进行码垛工作,进而有效提高码垛效率,通过水平控制器对回转伸缩臂的控制作用,保证机械爪能够在堆放台内部进行自由运动,转动收缩机在控制机械爪状态时,不会对机械爪的移动起到限制作用,水平控制器与转动收缩机各自起到独立运动的效果,降低了装置设计的难度。降低了装置设计的难度。降低了装置设计的难度。
技术研发人员:钱志云
受保护的技术使用者:箭牌智能科技(张家港)有限公司
技术研发日:2021.11.01
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。