1.本发明涉及无人机领域的一种姿态控制方法,尤其涉及一种横列式双旋翼无人机姿态控制方法。
背景技术:
2.横列式双旋翼无人机,主要用于战术运输、客运、医疗、搜救、农用植保等任务,主要优势在于其双旋翼无人机横向安置,机身的纵向体积减少,相对于四旋翼少了两个旋翼和电机少了两个旋翼的动力消耗,整体的消耗降低,续航能力更强,带来的直接好处是相同体积下其运载能力相较于传统的四旋翼有明显的提升,载重能力也更大。
3.目前,双旋翼无人机的飞控算法非常复杂,不仅要考虑旋翼的控制,还要考虑舵机倾转等方面的特性,对飞控算法及其控制系统的要求远高于四旋翼。
技术实现要素:
4.针对现有技术存在的问题,本发明提出一种横列式双旋翼无人机姿态控制方法。本发明通过串级控制和内环的adrc控制来显著提升了双旋翼无人机姿态控制系统的抗干扰和动态响应能力,有效地抑制了多源干扰对双旋翼无人机飞行器高度控制性能的影响。
5.为了实现上述技术目的,本发明的技术方案为:
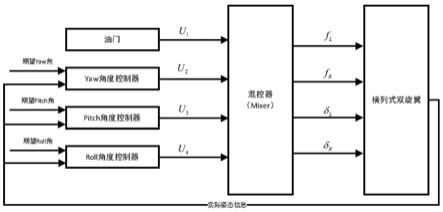
6.1)针对俯仰通道、横滚通道、偏航通道的每个通道,建立相同的角度控制器,角度控制器采用串级控制,包括外环控制器和内环控制器,内环控制器采用基于模型的自抗扰角速度控制,外环控制器接收输入的期望角度后处理获得期望角速度进而输入到内环控制器,经内环控制器处理后输出当前通道的虚拟控制量,再发送到混控器;
7.2)建立混控器,将角度控制器输入过来的俯仰通道、横滚通道、偏航通道的虚拟控制量和油门通道的虚拟控制量共同处理为双旋翼无人机执行器的输出,用于控制双旋翼无人机飞行时的姿态,实现横滚、俯仰、偏航三通道的解耦,混控器表示为:
[0008][0009][0010][0011][0012]
式中,δ
l
,δ
r
表示双旋翼无人机的两个旋翼上舵机倾转的角度,f
l
,f
r
表示双旋翼无人机的两个旋翼产生的推力;u1,u2,u3,u4表示油门输入控制量、横滚输入控制量、俯仰输入控制量和偏航输入控制量。
[0013]
本发明中,如图3所示,虚拟控制量u1,u2,u3,u4与执行器输出的关系为:
[0014][0015]
式中,δ
l
,δ
r
表示双旋翼无人机的两个旋翼上舵机倾转的角度,f
l
,f
r
表示双旋翼无人机的两个旋翼产生的推力。
[0016]
所述的外环控制器具体公式为:
[0017]
w
d
=k
p
(θ
d
‑
θ)
[0018]
其中,θ
d
和θ分别代表当前通道的期望角度和实际角度,k
p
表示比例控制的增益;w
d
代表外环控制器输出的当前通道的期望角速度。
[0019]
所述的内环控制器包括扩张状态观测器、线性微分跟踪器和线性控制律;
[0020]
将由外环控制器输出过来的期望角速度输入到线性微分跟踪器中,输出内部期望角速度v1和内部期望角加速度v2,线性微分跟踪器表示为:
[0021][0022]
式中,v1表示内部期望角速度,v2表示内部期望角加速度,w
d
表示输入的期望角速度,r表示信号低通滤波的强度;t表示控制器控制周期时间;
[0023]
同时将实际角速度y输入扩张状态观测器,输出当前通道的估计角加速度z1和当前通道的角速度扰动量z2,公式为:
[0024][0025]
式中,z1、z2表示当前通道的估计角速度和角速度扰动量,y表示当前通道的实际角速度,e
o
表示测量角速度和估计角速度的偏差,β1、β2为扩张状态观测器的第一、第二参数,u为内环控制器的输出量;t表示控制器控制周期时间;
[0026]
将内部期望角速度v1、内部期望角加速度v2分别与扩张状态观测器输出的当前通道的估计角加速度z1和当前通道的估计角加速度进行相减后输入线性控制律u0,线性控制律表示为:
[0027][0028]
式中,e表示期望角速度和估计角速度之间的偏差;表示期望角加速度和估计角加速度之间的偏差,k表示比例参数,d表示微分参数,u0表示线性控制律的输出结果;
[0029]
然后将输出结果u0与扩张状态观测器输出的当前通道的角速度扰动量z2进行以下处理获得内环控制器的输出量u,并反馈到扩张状态观测器中,表示为:
[0030]
u=u0‑
z2/b
[0031]
其中,b表示扩张状态观测器的观测参数。
[0032]
所述角度控制器中的扩张状态观测器的观测参数b,分别针对俯仰通道、横滚通道、偏航通道的每个通道是采用双旋翼无人机系统模型确定的,具体公式如下:
[0033]
横滚通道:
[0034]
俯仰通道:
[0035]
偏航通道:
[0036]
其中,i
x
、i
y
和i
z
分别表示双旋翼无人机的机体坐标系下xyz轴上的惯量;h表示双旋翼无人机中两个螺旋桨到双旋翼无人机重心的垂直距离;l表示电机到双旋翼无人机重心的水平距离。
[0037]
而且,本发明角速度内环控制器采用基于模型的自抗扰角速度控制,通过模型信息来设置扩展状态观测器的观测参数b,这样可以简化调参难度,来消除扰动,增加系统的鲁棒性。
[0038]
由于双旋翼无人机与四旋翼不同,双旋翼无人机需要考虑的扰动比四旋翼多,比如舵机扭矩对机身姿态的影响,这种扰动一般不能直接忽略,但是舵机扭矩一般不能直接获得。因此在角速度内环,使用扩张状态观测器去观测舵机扭矩,来消除舵机扭矩带来的扰动,以此来获取更好的控制特性和扰动观测性能。
[0039]
所述的执行器包括了电机和舵机,电机布置在舵机的输出轴上,由舵机带动电机倾斜,执行器用于控制电机的转速和舵机带动电机倾斜的倾斜角度。
[0040]
本发明建立世界坐标系,以双旋翼无人机之间的连线方向作为y轴方向,竖直重力向下作为z轴方向,同时垂直于y轴方向和z轴方向的方向为x轴方向。如图2所示,世界坐标系坐标系,x
w
、z
w
分别代表双旋翼无人机在世界坐标系下x轴方向和z轴方向。x轴方向和z轴方向的运动分别代表了俯仰和偏航运动。
[0041]
本发明首先建立虚拟控制率与执行器输出之间的关系,以此设计混控器,进一步降低了姿态控制器设计的复杂度。还建立角度串级控制,角速度内环为基于模型的自抗扰角速度控制,这样能带来更好的动态特性,实现更强的抗扰效果/优势。
[0042]
采用上述技术方案带来的有益效果:
[0043]
1、设计双旋翼无人机串级角度控制,进一步改善了控制过程的动态特性,提高了系统控制质量;对于双旋翼无人机扰动变化激烈而且幅度大的过程适应性更好。
[0044]
2、对串级控制内环进行改进,由于双旋翼无人机需要考虑舵机扭矩和其他扰动对其姿态的影响,对于传统的pid算法都无法考虑,因为舵机扭矩一般是不能观测的。使用扩张状态观测器来观测舵机扭矩和其他扰动,可以进一步提高控制品质。
[0045]
3、把双旋翼无人机姿态模型的信息赋予给扩张状态观测器,进一步提高观测的速度和精度。
[0046]
4、通过混控器和角度控制器的设计,完美对俯仰、横滚、偏航三通道角度控制的解耦。并且整个姿态控制算法结构简单,容易在单片机等嵌入式设备上实现。
附图说明
[0047]
图1是本发明流程示意图。
[0048]
图2是双旋翼无人机模型示意图。
[0049]
图3是混控器模型示意图。
[0050]
图4是角度控制框图。
[0051]
图5是角速度adrc控制框图。
[0052]
图6是串级pid控制俯仰角曲线图。
[0053]
图7是本专利角度控制算法控制俯仰角曲线图。
具体实施方式
[0054]
下面结合附图和具体实施对本发明作进一步说明。
[0055]
本发明在无人机上设置了执行器,执行器包括了电机和舵机,电机布置在舵机的输出轴上,由舵机带动电机倾斜,执行器用于控制电机的转速和舵机带动电机倾斜的倾斜角度。
[0056]
本发明建立以下双旋翼无人机姿态模型:
[0057][0058][0059][0060]
式中,φ、θ和ψ分别表示横滚通道、俯仰通道和偏航通道的角度,和分别横滚通道、俯仰通道和偏航通道的角加速度;d1、d2和d3分别表示横滚通道、俯仰通道和偏航通道的扰动,扰动比如舵机扭矩;i
x
、i
y
和i
z
分别表示双旋翼无人机的机体坐标系下xyz轴上的惯量;h表示双旋翼无人机中两个螺旋桨到双旋翼无人机重心的垂直距离,垂直距离为沿重力高度方向的距离;l表示电机到双旋翼无人机重心的水平距离。
[0061]
如图1所示,本发明的实施例及其实施过程如下:
[0062]
1)如图4所示,在混控器的基础上,针对俯仰通道、横滚通道、偏航通道的每个通道,建立相同的角度控制器,角度控制器采用串级控制,包括外环控制器和内环控制器,外环控制器为p控制器,内环控制器采用基于模型的自抗扰角速度控制,外环控制器接收输入当前通道的期望角度后处理获得期望角速度进而输入到内环控制器,经内环控制器处理后输出当前通道的虚拟控制量,再发送到双旋翼无人机的混控器。
[0063]
俯仰通道、横滚通道、偏航通道的三通道的外环控制器都一样。
[0064]
外环控制器具体公式为:
[0065]
w
d
=k
p
(θ
d
‑
θ)
[0066]
其中,θ
d
和θ分别代表当前通道的期望角度和实际角度,实际角度是由双旋翼无人机的传感器检测获得,k
p
表示比例控制的增益;w
d
代表外环控制器输出的当前通道的期望角速度。
[0067]
俯仰通道、横滚通道、偏航通道的三通道的内环控制器拓扑关系一样,但参数不同,使得三通道的内环控制器不一样。
[0068]
如图5所示,内环控制器包括扩张状态观测器、线性微分跟踪器和线性控制律;
[0069]
将由外环控制器输出过来的期望角速度输入到线性微分跟踪器中,输出内部期望角速度v1和内部期望角加速度v2,线性微分跟踪器表示为:
[0070][0071]
式中,v1表示外环控制器的内部期望角速度,v2表示外环控制器的内部期望角加速度,w
d
表示输入的期望角速度,r表示信号低通滤波的强度,r越大跟踪信号越快;t表示控制器控制周期时间;
[0072]
同时将实际角速度y输入扩张状态观测器,输出当前通道的估计角加速度z1、当前通道的估计角加速度和当前通道的角速度扰动量z2,公式为:
[0073][0074]
将内部期望角速度v1、内部期望角加速度v2分别与扩张状态观测器输出的当前通道的估计角加速度z1和当前通道的估计角加速度进行相减后输入线性控制律u0,线性控制律表示为:
[0075][0076]
然后将输出结果u0与扩张状态观测器输出的当前通道的角速度扰动量z2进行以下处理获得内环控制器的输出量u,表示为:
[0077]
u=u0‑
z2/b
[0078]
具体实施中,角度控制器中的扩张状态观测器参数b,分别针对俯仰通道、横滚通道、偏航通道的每个通道是采用双旋翼无人机系统模型确定的,具体公式如下:
[0079]
横滚通道:
[0080]
俯仰通道:
[0081]
偏航通道:
[0082]
其中,i
x
、i
y
和i
z
分别表示双旋翼无人机的机体坐标系下xyz轴上的惯量;h表示双旋翼无人机中两个螺旋桨到双旋翼无人机重心的垂直距离,垂直距离为沿重力高度方向的距离;l表示电机到双旋翼无人机重心的水平距离。
[0083]
如图5所示,本发明建立扩张状态观测器、线性微分器td和线性控制律三者构成的自抗扰角速度控制器。该角度控制器可以改善了控制过程的动态特性,提高了系统控制质量;对于双旋翼无人机扰动变化激烈而且幅度大的过程适应性更好。
[0084]
2)如图3所示,建立混控器,将角度控制器输入过来的俯仰通道、横滚通道、偏航通道的虚拟控制量和其他外部输入的油门通道的虚拟控制量共同处理为双旋翼无人机执行
器的输出,用于控制双旋翼无人机飞行时的姿态,实现横滚、俯仰、偏航三通道的解耦,混控器表示为:
[0085][0086][0087][0088][0089]
式中,δ
l
,δ
r
表示双旋翼无人机的两个旋翼上舵机倾转的角度,f
l
,f
r
表示双旋翼无人机的两个旋翼产生的推力;u1,u2,u3,u4表示油门输入控制量、横滚输入控制量、俯仰输入控制量和偏航输入控制量,u1,u2,u3,u4均为虚拟控制量。
[0090]
本发明方法为了验证可行性,借助matlab进行仿真,同时加入了各种扰动来增加仿真的可信度。
[0091]
设定俯仰角度期望值为0.1rad,并且加入跟控制量一样大的正弦波扰动。根据图6、图7所示的结果,可以得出本方法对于抗扰性能完全优于pid,对于比较大的扰动也能自适应;控制性能也完全由于pid。
[0092]
具体经过matlab仿真测试和采集获得俯仰方向上pid响应曲线。结果如图6所示,图6中可见响应曲线无法保持在期望角度上。
[0093]
具体经过matlab仿真测试和采集获得俯仰方向上本控制方法的响应曲线。结果如图7所示,图7中可见响应曲线能完美的跟随角度期望。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。