1.本发明涉及一种多旋翼机控制系统及方法,属于旋翼机领域。
背景技术:
2.多旋翼机具有体积小、质量轻、结构简单、飞行控制方式灵活、对复杂地形以及狭小空间具有很强的适应性等优点。近年来,随着微电子技术、微处理器技术的发展,多旋翼机在军用、民用领域均有广泛的应用,例如战场侦察、战场打击、电力巡检、灾后搜救、室内外侦察、快递领域、农业植保等。
3.随着多旋翼机的广泛使用,对其要求也逐渐增高,其执行任务难度也在逐渐提升,并且任务环境也不断的复杂化、恶劣化,目前,多旋翼机采用摄像头、gps、扩展imu传感器等设备感知环境、感知自身状态,对机动目标的跟踪制导多为手动操作,已不能满足多旋翼机自主控制的要求。
4.现有的多旋翼机控制系统摄像头精度、gps数据稳定性、传感器数据可靠性不足,限制了旋翼机环境感知能力、自主能力和执行能力。
5.此外,现有目标跟踪和旋翼机自主降落大多应用pid来配合视觉信息来实现,但是pid控制的鲁棒性较差,受环境影响较大,导致控制精度较低,当目标处于移动状态时,例如与其它旋翼机进行交互、抓取移动的目标物体、降落目标为移动平台时,旋翼机有较大的抖动,会使得交互过程增长、降落不平稳,甚至引起旋翼机侧翻损坏。
6.因此,亟待设计出一种能够解决上述问题的旋翼旋翼机自主控制系统及方法。
技术实现要素:
7.为了克服上述问题,本发明人进行了锐意研究,设计出一种多旋翼机控制系统,其特征在于,包括测量模块、处理模块和信息传输模块,
8.其中,测量模块用于感知环境,包括gps、扩展imu传感器和光电吊舱;
9.所述处理模块用于对测量模块检测的数据进行解算,进而对多旋翼机和测量模块进行控制;
10.所述信息传输模块用于与地面基站进行通讯。
11.所述处理模块包括视觉处理器和飞控主芯片。
12.在视觉处理器中设置有检测模型和跟踪模型和调整模型,
13.所述检测模型在确定任务目标后从后续的图像中框选建议区域;
14.所述跟踪模型在确定任务目标后从后续的图像中框选跟踪选框;
15.所述调整模型获取建议区域和跟踪选框的重叠度,根据重叠度控制光电吊舱的旋转角速度。
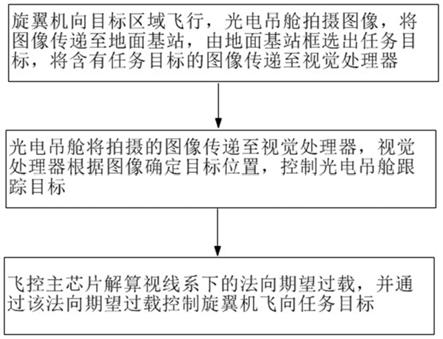
16.另一方面,本发明还提供了一种多旋翼机控制方法,包括以下步骤:
17.s1、旋翼机向目标区域飞行,光电吊舱拍摄图像,将图像传递至地面基站,由地面基站框选出任务目标,将含有任务目标的图像传递至视觉处理器;
18.s2、光电吊舱将拍摄的图像传递至视觉处理器,视觉处理器根据图像确定目标位置,控制光电吊舱跟踪目标;
19.s3、飞控主芯片解算视线系下的法向期望过载,并通过该法向期望过载控制旋翼机飞向任务目标。
20.具体地,在步骤s1中,旋翼机在地面基站的控制下飞行,地面基站实时获取光电吊舱拍摄的图像,判断图像中是否存在任务目标,当图像中出现任务目标时,地面基站在图像中框选出任务目标所在区域,将含有目标框的图像传递至视觉处理器。
21.在步骤s2中,视觉处理器接收到初始图后,开始对光电吊舱拍摄的图像进行识别,包括以下子步骤:
22.s21、从图像中框选出包含同类目标的建议区域;
23.s22、从图像中框选出跟踪选框;
24.s23、确定任务目标位置,调整光电吊舱的旋转角速度。
25.进一步地,在步骤s21中,视觉处理器通过检测模型从每一帧图像中框选出建议区域,所述检测模型为经过大量的数据学习获得的神经网络模型。
26.在步骤s22中,利用初始图像中框选出的需要跟踪的目标来训练回归模型,再通过回归模型在后续其他的图像中连续地挑选并跟踪该目标,给出跟踪选框。
27.在步骤s23中,通过建议区域和跟踪选框的比对来确定任务目标区域,在确定目标区域后,调整光电吊舱的旋转角速度,使得目标区域位于光电吊舱视场中心。
28.根据本发明,在步骤s3中,通过下式实时解算视线系下的法向期望过载:
[0029][0030]
其中,a
c
表示视线系下的法向期望过载,n表示比例导引系数,优选取4,v
r
表示视线方向相对速度,为光电吊舱的旋转角速度
[0031]
本发明所具有的有益效果包括:
[0032]
(1)根据本发明提供的多旋翼机控制系统及方法,设置独立的视觉处理器4,将测量解算与旋翼机的控制拆分成两个芯片运行,从而提高解算精度和速度;
[0033]
(2)根据本发明提供的多旋翼机控制系统及方法,通过将识别过程分解为建议区域和跟踪选框的方式确定任务目标,降低了运算量,提高了运算速度,识别速度快,尤其适合快速移动目标的跟踪、交互和降落;
[0034]
(3)根据本发明提供的多旋翼机控制系统及方法,在与任务目标进行交互或者降落在任务目标上时,与任务目标相对速度小,更加安全稳定;
[0035]
(4)根据本发明提供的多旋翼机控制系统及方法,在追踪移动任务目标时飞行速度快,能够在短时间内追踪上任务目标。
附图说明
[0036]
图1示出本发明一种优选实施方式的多旋翼机控制系统示意图;
[0037]
图2示出本发明一种优选实施方式的多旋翼机控制系统示意图;
[0038]
图3示出本发明一种优选实施方式的多旋翼机控制方法示意图;
[0039]
图4示出本发明实施例1中任务目标识别图。
[0040]
附图标记
[0041]1‑
gps;
[0042]2‑
扩展imu传感器;
[0043]3‑
光电吊舱;
[0044]4‑
视觉处理器。
具体实施方式
[0045]
下面通过附图和实施例对本发明进一步详细说明。通过这些说明,本发明的特点和优点将变得更为清楚明确。
[0046]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0047]
一方面,本发明提供了一种多旋翼机控制系统,包括测量模块、处理模块和信息传输模块,如图1、2所示。
[0048]
其中,测量模块用于感知环境,包括gps 1、扩展imu传感器2和光电吊舱3。
[0049]
进一步地,所述扩展imu传感器包括陀螺仪、加速度计、磁力计和气压计,其中气压计提供的高度信息作为gps信息的补充,弥补gps检测的高度精度低的问题。
[0050]
根据本发明,所述光电吊舱安装在旋翼机的头部,以保证广阔的视场;所述gps安装在旋翼机尾部,远离其它的电子设备,以减少电磁干扰;所述扩展imu传感器安装在质心处,以保证检测数据的准确性。
[0051]
在一个优选的实施方式中,所述光电吊舱为eot90a3光电吊舱,用于实时拍摄图像,其具有摄像角度控制精度高、延迟低等优点。
[0052]
在一个优选的实施方式中,所述陀螺仪采用l3gd20h、加速度计和磁力计采用lsm303d、气压计采用ms5611。
[0053]
所述处理模块用于对测量模块检测的数据进行解算,进而对多旋翼机和测量模块进行控制,包括视觉处理器4、飞控主芯片和提供电能的电源管理模块。
[0054]
传统的处理模块将测量模块检测的数据均传递至飞控主芯片,由飞控主芯片进行解算,进而控制多旋翼机和测量模块,受制于飞控芯片运算能力的限制,无法做到精确的解算,并且解算速度较慢,导致飞控芯片获得的信息精度低,环境感知能力差,无法较好的完成自主识别、控制精度较低、在交互和降落时旋翼机有较大的抖动等现象。
[0055]
在本发明中,通过设置独立的视觉处理器4,将测量解算与旋翼机的控制拆分成两个芯片运行,从而提高解算精度和速度。
[0056]
在一个优选的实施方式中,所述视觉处理器4为tx2处理器,所述飞控主芯片为stm32f427;tx2具有体积小、图像处理性能强、功耗低等,适合在旋翼机上进行搭载。
[0057]
根据本发明一个优选的实施方式,所述光电吊舱3通过usart与视觉处理器4连接;所述陀螺仪、加速度计、磁力计和气压计通过spi与飞控主芯片连接;所述视觉处理器4通过mavros与飞控主芯片连接。
[0058]
所述信息传输模块用于与地面基站进行通讯,将图像传递至地面基站,并将地面基站的指令传递至旋翼机。
[0059]
所述指令包括任务目标的选择和对旋翼机的直接控制。
[0060]
根据本发明,所述信息传输模块能够将光电吊舱拍摄的图像传递至地面基站,由地面基站框选出目标,并接收地面基站传递回的含有目标框的图像,将此图像传递至视觉处理器;
[0061]
所述视觉处理器获得含有目标框的图像后,光电吊舱向其传递后续拍摄的图像。
[0062]
进一步地,所述视觉处理器用于在后续拍摄的图像中框选出目标区域,并控制光电吊舱的旋转角速度,使得目标区域位于拍摄图像的中央位置。
[0063]
进一步地,在视觉处理器中设置有检测模型和跟踪模型和调整模型。
[0064]
所述检测模型用于在确定任务目标后从后续的图像中框选建议区域;所述跟踪模型用于在确定任务目标后从后续的图像中框选跟踪选框;所述调整模型用于获取建议区域和跟踪选框的重叠度,根据重叠度控制光电吊舱的旋转角速度。
[0065]
所述飞控主芯片实时解算视线系下的法向期望过载,并通过该法向期望过载控制旋翼工作,飞向任务目标,从而完成与任务目标的抓取或降落在任务目标上。
[0066]
另一方面,本发明还提供了一种多旋翼机控制方法,如图3所示,包括以下步骤:
[0067]
s1、旋翼机向目标区域飞行,光电吊舱拍摄图像,将图像传递至地面基站,由地面基站框选出任务目标,将含有任务目标的图像传递至视觉处理器;
[0068]
s2、光电吊舱将拍摄的图像传递至视觉处理器,视觉处理器根据图像确定目标位置,控制光电吊舱跟踪目标;
[0069]
s3、飞控主芯片解算视线系下的法向期望过载,并通过该法向期望过载控制旋翼机飞向任务目标。
[0070]
在步骤s1中,旋翼机在地面基站的控制下飞行,地面基站实时获取光电吊舱拍摄的图像,判断图像中是否存在任务目标,当图像中出现任务目标时,地面基站在图像中框选出任务目标所在区域,将含有目标框的图像传递至视觉处理器。
[0071]
在一个优选的实施方式中,所述光电吊舱拍摄图像的频率为20~30hz,既保证了图像的连续性,又减少了图像信息传输的总量,降低了对信息传输模块的性能要求,同时节约了旋翼机的电能。
[0072]
根据本发明,地面基站在收到的图像中选择任意一帧图像框选出目标区域即可,将此帧含有目标框的图像作为初始图,通过信息传输模块传递至视觉处理器,以供视觉处理器识别任务目标。
[0073]
在步骤s2中,视觉处理器接收到初始图后,开始对光电吊舱拍摄的图像进行识别,具体地,包括以下子步骤:
[0074]
s21、从图像中框选出包含同类目标的建议区域;
[0075]
s22、从图像中框选出跟踪选框;
[0076]
s23、确定任务目标位置,调整光电吊舱的旋转角速度。
[0077]
根据本发明,步骤s21在检测模型中进行,步骤s22在跟踪模型中进行,步骤s23在调整模型中进行。
[0078]
在视觉识别过程中,通过将识别过程分解为建议区域和跟踪选框的方式确定任务目标,相比于传统的直接进行任务目标的识别,降低了模型的计算精度的要求,降低了模型运算量,同时还保证了模型的运算准确率,提高了运算速率,使得旋翼机能够识别跟踪快速
移动的任务目标;同时,其还解决了传统任务目标识别过程中,目标边框回归的精度较低,目标轮廓识别不准确、识别难度大的问题,提高整体的目标跟踪效果。
[0079]
优选地,步骤s21和s22同步进行,光电吊舱每传递一帧图像,视觉处理器在该图像中框选出建议区域和跟踪选框。
[0080]
具体地,在步骤s21中,视觉处理器从每一帧图像中框选出建议区域,所述建议区域中具有与待跟踪目标外形相似或者同种类的物体。优选地,在每帧图像中可以包含任意数量个建议区域。
[0081]
在本发明中,视觉处理器通过检测模型框选出建议区域,在所述检测模型中存储有经过样本冲刷的目标模型,检测模型从该目标模型中调取该目标的外形信息,即该检测模型能够从图像中框选出与要跟踪的目标外观近似的物体,得到带有边界框的建议区域。
[0082]
优选地,所述检测模型为经过大量的数据学习获得的神经网络模型,检测模型将图像划分为多个采样区域,优选划分为7
×
7的网格区域,预测每个采样区域中b个中心落在采样区域里的目标边界框的位置大小和边界框里目标的置信度,并对边界框中的物体进行分类。
[0083]
进一步地,检测模型的输出为多维张量,优选为7
×7×
(5
×
b c)的张量。其中,5表示每个边界框的位置、大小和置信度(px,py,pw,ph,pp),所述边界框的位置包括边界框中心点在x轴上的坐标px和在y轴上的坐标py;所述边界框的大小包括边界框的宽度值pw和高度值ph,置信度由字母pp表示。b表示每个网格预设的候选框区域数量,通常取2,c表示分类数量,具体来说是汽车、行人、自行车、飞机等具体类别。
[0084]
所述置信度是指神经网络预测该区域属于该类别的概率,比如神经网络输出某个位置有一辆车,置信度是0.6的意思就是神经网络认为该区域60%可能性是汽车,40%可能性不是汽车。
[0085]
更进一步地,在检测模型中,其最后一个全连接层可以预测物体边界框中心点坐标(px,py)和宽高(pw,ph)及置信度pp和物体分到每一类的概率。其中宽高是相对于图像的归一化值,中心位置坐标是相对于网格位置的归一化值,均介于0到1之间。
[0086]
检测模型通过对每个网格预测的分类信息和对应边界框的置信度相乘,得到每个边界框的分类置信度,过滤置信度过低的边界框,通常过滤掉置信度小于0.7的边界框;并对剩余的窗口按置信度大小顺序,进行非极大抑制处理,过滤重叠窗口,输出剩余的窗口作为最终输出,即为所述的建议区域。
[0087]
在步骤s22中,利用初始图像中框选出的需要跟踪的目标来训练回归模型,再通过回归模型在后续其他的图像中连续地挑选并跟踪该目标,即在后续的每一帧图像中给出包含该待跟踪目标的跟踪选框。
[0088]
优选地,视觉处理器在获得初始图像后,对初始图像进行预处理,以提高处理速度和识别精度,包括如下过程:
[0089]
s201、构造高斯分布回归标签,所述高斯回归标签可以用y1表示,越接近中心值越大,边缘接近0,y1矩阵和搜索窗口大小相同。
[0090]
通常跟踪算法不是在整张图像中寻找目标,而是在上一帧目标的位置,取目标大小2.5倍的区域寻找目标,这个区域称之为“搜索窗口”。即所述搜索窗口是从整个图像上裁剪下来的一个子图像,图像都是矩阵形式。
[0091]
s202、从第1帧中目标位置p1裁剪出搜索窗口,提取特征x1,x1和搜索窗口大小相同,需要对x1加一个余弦窗;其中,x1是搜索窗口区域的方向梯度直方图(hog);
[0092]
所述余弦窗是中间为1,越边缘越接近0的窗口,通过添加该余弦窗能够抑制周围样本,突出中间样本。
[0093]
s203、使用x1和y1,训练回归模型f1,使y1=f1(x1)成立,
[0094]
所述回归标签的中间得分最高,边缘得分为0。回归标签是y1,已经知道输入x1,输出y1,训练训练回归模型f1其实就是反解出f1的参数。举例说明,对于一维方程,已经知道x=1、y=2,即可得到函数y=2x,然后当x=2时,即可获知y=4,上述x1和y1是把函数输入输出从数字变为矩阵。
[0095]
根据本发明,在步骤s22中,通过下述子步骤识别跟踪目标:
[0096]
s221、在第t帧图像中,从p
t
中提取特征x
t
,构造高斯分布回归标签y
t
,训练回归模型y
t
,该回归模型能对固定大小窗口的样本予以响应;在本子步骤中,当t=1时,与上述子步骤s201~s203中的操作过程一样,在子步骤s221~s223中,由于特征x
t
是持续变化的,反解出来的回归模型也是每帧都变化的。
[0097]
s222、在第t 1帧图像中,从p
t 1
位置附近生成候选窗口;具体来说,在上一帧目标位置,选取上一帧目标大小的2.5倍区域作为候选窗口,用回归模型y
t
测试每个候选窗口的响应;一般来说,把回归模型的作用称为滤波器,响应就是用这个滤波器作用在某个区域得到的输出。
[0098]
s223、得到最大响应窗口和位置p
t 1
,该位置p
t 1
即为该第t 1帧图像中的待跟踪目标位置,所述响应窗口即跟踪选框。
[0099]
s224、待得到下一帧即第t 2帧图像时,重复上述子步骤s221至子步骤s223。
[0100]
在步骤s23中,设置有调整模型,通过建议区域和跟踪选框的比对来确定任务目标区域。
[0101]
具体地,通过比对建议区域和跟踪选框的重叠度确定任务目标区域,所述重叠度为:
[0102][0103]
由于所述建议区域和跟踪选框都是在同一帧图线上框选的,所以能够直接读取其交集和并集,并根据像素点数量读取各自的面积。
[0104]
在本发明中,跟踪选框仅有一个,而步骤s21中获得的建议区域可能具有多个,多个建议区域中每个区域分别解算与跟踪选框之间的重叠度,选择重叠度最高的建议区域作为目标区域。
[0105]
进一步地,在调整模型中还设置有阈值,将重叠度大于阈值的建议区域作为目标区域;当s22中未能得到跟踪选框时,或者不存在使得重叠度大于阈值的建议区域时,判定目标被遮挡,旋翼机通过信息传输模块提醒地面基站进行人工干预,并继续拍摄图像,直至出现重叠度大于阈值的建议区域或接收到地面基站的其它指令。
[0106]
在本发明中,优选地,所述阈值的取值为0.2~0.7,优选地为0.5。
[0107]
在步骤s23中,在确定目标区域后,调整光电吊舱的旋转角速度,使得目标区域位于光电吊舱视场中心,优选地,使得目标区域中点位于光电吊舱视场中心。
[0108]
优选地,通过连续帧图像中目标区域的解算,控制光电吊舱转动的角速率控制指令,基于该角速率控制指令控制光电吊舱转动,从而确保任务目标始终处于视场中心。
[0109]
任务目标区域始终处于视场中心,不仅使得旋翼机不易丢失任务目标,还为后续旋翼机靠近任务目标过程中的制导算法提供了更为简单的数据模型,减少了计算量,提高了计算速度,同时也使得视线系下的法向期望过载的计算成为可能。
[0110]
具体地,对连续帧的图像中的目标区域中点进行像素偏差进行pid解算,获取角速度控制指令,即
[0111][0112][0113]
其中,control
x
表示生成的角速率控制指令在x轴上的分量,control
y
表示生成的角速率控制指令在y轴上的分量,此处的x轴和y轴是图像上的彼此垂直的两条坐标轴。err
x
,err
y
表示像素偏差,即目标区域中点在图像中距离图像中心的像素值;所述k
p
,k
i
,k
d
都表示pid参数,优选取值为(80,0,5),所述dt是相邻帧时间间隔。
[0114]
在本发明中,所述视觉处理器实时获取光电吊舱的旋转角度,将光电吊舱的旋转角度和旋转角速度传递至飞控主芯片,由飞控主芯片解算视线系下的法向期望过载,并通过该法向期望过载控制旋翼机飞向任务目标。
[0115]
具体地,在步骤s3中,通过下式实时解算视线系下的法向期望过载:
[0116][0117]
其中,a
c
表示视线系下的法向期望过载,n表示比例导引系数,优选取4,v
r
表示视线方向相对速度,为光电吊舱的旋转角速度。
[0118]
在本发明中,所述视线方向指光电吊舱与任务目标的连线方向,视线方向相对速度是指视线系下任务目标相对旋翼机的速度。
[0119]
传统的旋翼机控制方法,多采用相对位置和速度作为pid输入的尾追法,在本发明中,采用pn方法以旋翼机与任务目标连线角度和视线角速率作为输入,只要保证角度不变追击目标,而不需要通过尾追,大大提高降落速度。
[0120]
此外,由视线系下的法向期望过载的解算式可知,当旋翼机与任务目标的相对速度越小时,旋翼机的过载也越小,与任务目标的速度也就越接近。本发明通过视线系下的法向期望过载控制旋翼机飞向任务目标,达到了在追踪移动任务目标的过程中速度较快,在靠近在任务目标时速度较小的效果,使得与移动任务目标的交互或降落在移动的任务目标上更加安全稳定。
[0121]
根据本发明,旋翼机在追踪和交互降落阶段采取不同的策略,在追踪过程,即水平追踪使用比例导引,高度方向采取pid控制,保证水平速度大小和方向与目标一致后,高度下降,与任务目标交互或降落在任务目标上,优选地,高度方向上pid控制的pid取值为0.8,0.4,1.5。
[0122]
优选地,所述视线方向相对速度v
r
为视线坐标系中旋翼机与任务目标之间的相对速度v
l
在x轴方向的分量,通过下式获得:
[0123]
v
r
=[1,0,0]*v
l
(二)
[0124]
其中,v
r
是标量,v
l
是矢量。
[0125]
优选地,视线坐标系中旋翼机与任务目标之间的相对速度v
l
可通过地理坐标系中旋翼机与任务目标之间的相对速度转换得到,如下式:
[0126][0127]
其中,表示地理坐标系和视线坐标系之间的转换矩阵,v
n
表示地理坐标系下旋翼机与任务目标之间的相对速度;
[0128]
优选地,所述转换矩阵通过下式获得:
[0129][0130]
优选地,v
n
在地理坐标系中的三个分量v
x
、v
y
和v
z
分别由地理坐标系中旋翼机和目标在三个方向的偏差值x、y、z微分得到。
[0131]
其中,地理坐标系中,竖直方向的偏差值z由旋翼机的高度值与目标的高度值作差得到,所述旋翼机的高度值由旋翼机上的气压计获得,所述任务目标的高度值通过对含有任务目标的连续帧图像解算获得;
[0132]
地理坐标系中,水平方向的偏差值x和y通过下式(五)获得:
[0133][0134]
本发明中,q
x
表示地理坐标系中光电吊舱旋转角度在x轴方向的分量,q
y
表示地理坐标系中光电吊舱旋转角度在y轴方向的分量,q
z
表示地理坐标系中光电吊舱转角度在z轴方向的分量;θ表示地理坐标系中旋翼机的俯仰角,表示地理坐标系中旋翼机的滚转角,通过陀螺仪得到。
[0135]
本发明中,所述的地理坐标系是指地理坐标系enu(东北天),其中x轴为与大地水平面平行,指向地理东方(e),y轴为与大地水平面平行,指向地理北方(n),z轴垂直地面指向上,按右手定则,其方向向上(u)。
[0136]
所述视线坐标系是指以光电吊舱镜头中心为原点o,ox轴是旋翼机与任务目标的连线,指向移动平台为正,oz轴位于垂直地面的铅锤平面内,与ox垂直且向上为正,oy轴方向由右手定则决定。
[0137]
实施例
[0138]
实施例1:
[0139]
在地面上有多辆汽车,汽车绕转盘巡航,旋翼机上光电吊舱拍摄图像频率为20hz。
[0140]
在步骤s1中,旋翼机向目标区域飞行,光电吊舱拍摄图像,将图像传递至地面基站,地面基站框选其中一辆车作为任务目标,将含有任务目标的图像传递至视觉处理器;
[0141]
在步骤s2中,检测模型为经过大量的数据学习获得的bp神经网络模型,其将图像
划分为7
×
7的网格区域进行识别,过滤掉置信度小于0.7的边界框,从而框选出包含同类目标(所有汽车)的建议区域;通过跟踪模型框选出跟踪选框;调整模型通过计算重叠度确定任务目标区域,并控制光电吊舱旋转角速度,使得任务目标区域位于图像中央,如图4所示。
[0142]
所述重叠度为:
[0143][0144]
所述光电吊舱旋转角速度的控制指令为对连续帧的图像中的目标区域中点进行像素偏差进行pid解算获取
[0145][0146][0147]
其中,control
x
表示生成的角速率控制指令在x轴上的分量,control
y
表示生成的角速率控制指令在y轴上的分量,此处的x轴和y轴是图像上的彼此垂直的两条坐标轴。err
x
,err
y
表示像素偏差,即目标区域中点在图像中距离图像中心的像素值;所述k
p
,k
i
,k
d
取值为(80,0,5),所述dt为0.05s。
[0148]
旋翼机根据下式解算视线系下法向期望过载
[0149][0150]
其中,比例导引系数的取值为4,通过该视线系下法向期望过载控制旋翼机,使得旋翼机平稳的降落在地面基站框选的汽车顶上。
[0151]
以上结合了优选的实施方式对本发明进行了说明,不过这些实施方式仅是范例性的,仅起到说明性的作用。在此基础上,可以对本发明进行多种替换和改进,这些均落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。