1.本发明属于管道检测领域,具体涉及一种管道检测机器人的控制系统。
背景技术:
2.城市的规模不断扩大,城市的用水量不断增多,排水量也越来越大,其管道清淤、管道修复、管道疏通的任务也越来越重,为此需要对城市内部的排水管网进行定期的疏通清洗及修复。在清洗、修复之前需要对管道内部的整体情况进行详细的检测,做出检测报告。
3.现有的管道检测机器人控制系统部分或为基于单片机开发,通过实体按键加外接键盘辅助操作。操作方法僵硬,系统交互能力、硬件接口通用性、系统冗余性差且系统软件升级及后续功能扩展难度大。或为基于pc端开发,通过外接笔记本和平板电脑安装pc端控制程序,通过发出无线信号控制爬行系统。稳定性和抗干扰能力欠佳,对作业环境要求稍高,设备整体性差。
4.现有的管道检测机器人控制系统部分或为基于单片机开发,通过实体按键加外接键盘辅助操作。操作方法僵硬,系统交互能力、硬件接口通用性、系统冗余性差且系统软件升级及后续功能扩展难度大。或为基于pc端开发,通过外接笔记本和平板电脑安装pc端控制程序,通过发出无线信号控制。稳定性和抗干扰能力欠佳,对作业环境要求稍高,设备整体性差。电控部分的线路复杂,故障率高。控制方法采用人工控制、人工判读录像制作报告,工作效率低,人工判读误差率较高。
技术实现要素:
5.本发明的目的在于提供管道检测机器人的控制系统。
6.为实现上述目的,本发明提供如下技术方案:
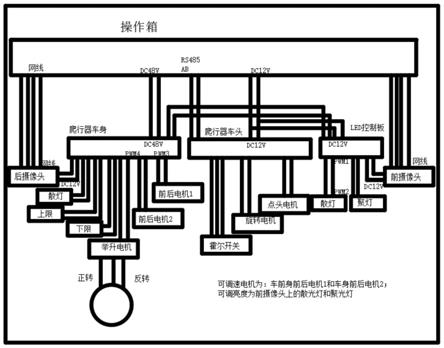
7.管道检测机器人的控制系统,其包括操作系统和机器人执行系统,操作系统包括显示器、操作键盘、控制处理中心,操作键盘连接控制处理中心,控制处理中心通过无线或有线连接机器人执行系统,机器人执行系统包括机器人的车身控制部分、车头控制部、led控制部分,车身控制部分包括:后摄像头的dc12v电源提供、散光灯的开关控制、举升电机正反转、前后电机a和前后电机b的正反转和pwm控制;车头控制部分包括:霍尔开关、旋转电机正反转、点头电机正反转;led控制部分包括:前摄像头的dc12v电源、散光灯的pwm控制、聚光灯的pwm控制。
8.优选的,控制处理中心,包括控制管理系统和控制执行系统,控制执行系统与机器人执行系统连接,控制管理系统包括系统登录模块、数据处理模块、手持式pad系统。
9.优选的,控制处理中心集成在linux芯片主板上,设置usb通用接口,通过usb通用接口连接操作键盘、操作键盘包括键盘、鼠标(支持无线),存储设备,交互能力好,爬行器摄像系统控制部分都可通过键盘或鼠标完成,系统冗余性好。爬行器运动部分通过控制器上的摇杆操作,简单、方便、稳定。
10.优选的,手持式pad系统,如平板电脑、手机app。本检测机器人设备支持智能托管模式,通过ai人工智能程序使检测机器人自行作业,自行前进、后退、采集录像、影像判读、评估报告生成,极大的提高工作效率和评估报告准确率。
11.由通过变压器多种电压输出(最高68v,对人体有伤害),经旋钮开关选择电压后,由整流桥整流并由电容进行滤波后输出的方案。改为通过开关电源输出(36v,对人体无伤害),经电子调速器调速后输出到电机。由多路供电线路减少至2路供电,省掉了笨重的变压器、整流桥及滤波电容。
12.优选的,本检测机器人设备支持智能托管模式,通过ai人工智能程序使检测机器人自行作业,自行前进、后退、采集录像、影像判读、评估报告生成,极大的提高工作效率和评估报告准确率。
13.与现有技术相比,本发明的有益效果是:本控制系统要解决实际作业环境下设备稳定性、整体性、可扩展性。操作简单、方便、稳定,信号传输部分抗干扰能力、整体系统故障冗余能力。精简元器件设备及线路,降低设备故障率。采用电子调速器对照明的亮度及运行速度进行无极调速。精简内部元器件、供电方案为直流开关电源供电,减轻设备的整体重量。通过摄像ai功能,使机器人具备自行控制能力,采用自动托管模式后,通过ai人工智能程序检测机器人自行作业,自行前进、后退、采集录像、影像判读、评估报告生成。
14.本检测机器人设备支持智能托管模式,通过ai人工智能程序使检测机器人自行作业,自行前进、后退、采集录像、影像判读、评估报告生成,极大的提高工作效率和评估报告准确率。
附图说明
15.图1为本发明管网检测机器人项目整体控制结构框图;
16.图2为本发明管网检测机器人硬件
‑
操作箱整体控制结构框图;
17.图3为本发明管网检测机器人硬件
‑
机器人整体控制结构框图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1所示,管道检测机器人的控制系统,其包括操作系统和爬行器执行系统,操作系统包括显示器、操作键盘、控制处理中心、无线路由或无线交换机,操作键盘连接控制处理中心,控制处理中心,包括控制管理系统和控制执行系统,控制管理系统包括系统登录模块、数据处理模块、手持式pad系统。,控制执行系统与通过无线或有线连接爬行器执行系统,机器人执行系统包括爬行器人的车身控制部分、爬行器车头控制部、led控制部分;
20.无线路由或无线交换机:安装在操作箱里,主要是连接前后摄像头、核心控制器、预留以后的上网设备、pad无线设备。pad:这个是买市场上现有的设备,具体型号由项目开发人员自行确定,采用现在主流的显示屏,以方便实现操作为主。用安卓系统,采用10寸显示屏,一个pad对应一个操作箱。
21.显示屏为13.3寸1080p显示屏:这个是买市场上现成的设备,采用hdmi接口。
22.1、爬行器车身控制部分为:
23.该控制器自主研发,1)需要给后摄像头提供12v/2a电源(如因为空间原因,该12v电源可以由外部电缆直接供电);2)同时该控制器能通过控制方式来控制后摄像头散光灯直接亮灭,与该散光灯具有接口,该接口电压为12v/1a;3)控制举升电机为12v/2a,直接进行正反转控制;4)该控制器能通过pwm控制前后电机1正反转,要求24v/8a的驱动能力;5)该控制器能通过pwm控制前后电机2正反转,要求24v/8a的驱动能力;6)该控制器具备rs485通讯接口;7)具备dc48v接口;8)如实际需要,可以再增加一组外部输入到该控制板的dc12v电源接口;9)预留一个dc12v/1a和rs485的接口;
24.2、爬行器车头控制部分为:
25.该控制器自主研发,1)具备dc12v电源接口;2)具有rs485通讯接口;3)控制旋转电机12v/3a正反转的驱动能力;4)控制点头电机12v/1a正反转的驱动能力;5)该控制器能通过外接一个霍尔开关,实现一键复位功能;
26.3、led控制部分为:
27.具备dc12v电源接口;2)具有rs485通讯接口;3)需要给前摄像头提供12v/2a电源;4)同时该控制器能通过pwm控制方式来控制前摄像头散光灯的亮度,与该散光灯具有接口,该接口电压为12v/1a;5)同时该控制器能通过pwm控制方式来控制前摄像头聚光灯的亮度,与该聚光灯具有接口,该接口电压为12v/1a。
28.登录模块,设置选择功能模块,通过密码进入,该密码可以是固定的,最好是可以修改新密码。模式设置选择为以下3项:1)机器人模式;2)潜望镜模式;3)内窥镜模式。开机默认是机器人模式,通过该菜单选择后,进行保存,下一次开机就是关机前选择的模式。
29.1、机器人模式内容:
30.在菜单设置界面,还设置设备类型选择,选项共3项:(1)机器人模式;(2)潜望镜模式;(3)内窥镜模式。该设置功能通过密码进入,该密码可固定,最后是可以修改新密码方式。
31.在显示屏底部还设置有一条状态栏,该状态栏类似windows显示窗口底部状态条。该状态栏内容包含以下3项内容:(1)gps的经纬度;(2)陀螺仪的两个二维画面和仰望角度以及倾斜角度、起伏高/管径(当前两个从陀螺仪得到的数据即为坡度和左右倾角,起伏高/管径(起伏高即仰望角与小车的三角函数sin计算。比如当前仰望角是30度,小车设置轴长度为30cm,则起伏高=sin30*30cm,管径为设置值));(3)水质检测的数据,主要为cod、氨氮、ph值,现场实时水质检测时要求检测数据能显示在录像信息中,并在检测数据下标明该水质在几类地表水范围内(该功能为预留功能)。
32.小车轴长度应该设置为选择项,当选择大爬行器、小爬器,系统根据此来读出轴长。管径则不需要设置,可直接在屏幕上取出管径。
33.显示屏底部(或侧边)的状态栏中;
34.3个显示信息可以通过设置菜单进行有选择的显示或隐藏,如果设置成显示时,与该选项有关的内容在原来位置进行显示;如该显示需要与视频进行数据叠加时,则需要在设置成显示的同时,再设置成录像,就能在视频录像时,摄像头的视频录像与该状态形成一个整体的视频(即在视频中时实显示该选项内容);反之如果设置成隐藏状态时,该状态不
需要显示,也不需要与当前视频进行数据叠加。
35.比如:当前选择了gps的经纬度状态为显示状态,同时也设置了录像状态,其他两项(陀螺仪和水质检测)为隐藏状态时,则当前底部(侧边)状态栏只在原来设定的gps位置显示该gps的经纬度,该经纬度需要时实显示状态,在进行录像时,需要把这个gps的经纬度与视频信息进行叠加,形成一个完整的mp4视频输出。在后续的视频画面中,也能时实的看到当前gps所处的经纬度状态信息。如果这时把陀螺仪设置成显示状态,但没有设置成录像状态。在以上两个状态下,如果开始录像,则把gps的经纬度与录前视频进行叠加后再录像成一个统一的视频,而陀螺仪也只是在当前显示屏上实时显示,不与录像视频叠加,纯当显示使用。其它情况类同。
36.如果在陀螺仪设置成显示时,若屏幕上没有录入管径,则在陀螺仪显示处增加提示信息如“未读取到管径”信息。
37.还设置有前后摄像头切换功能,该功能类似手机前后摄像头功能。
38.切换前后摄像头按钮考虑放在屏幕右侧中间,以半透明方式进行显示,参照手机前后摄像头切换按钮。在菜单里也应该有该项切换选项,同时增加对应前后摄像头键盘切换组合键(ctrl q)。在正式录制时,该半透明的按钮不隐藏,一直显示在显示屏上,但不需要录制。如果在录制过程中,点击了前后摄像头切换功能,则会弹出一个对话框“确认停止录像并切换摄像头 确认和返回”,在确认操作时,则直接把当前录制停止,并直接切换到后摄像头;如果返回操作时,则该提示对话框消失,继续之前的操作。
39.还设置有前摄像头手动调焦功能。通过键盘ctrl down和ctrl up实现前摄像头的手动调焦功能,同时考虑在菜单选项中,也有对应手动调焦的按钮。
40.还设置有复位摄像头功能。该按钮为物理按钮,采用现有的f8键作为物理一键还原使用。当该物理按键按下去再放开后,摄像头的旋转电机工作,直接回位到初始位置,该初始位置就是设置霍尔开关的地方。同时也要在菜单设置中有该按钮功能。
41.前后摄像头选择数字网络摄像头:前摄像头不低于200万像素具有调焦功能;后摄像头不底于100万摄像头。整体录像数据传输延迟控制在0.45s以内。
42.当前显示界面内容需要重新调整,以后输入都是固定位置,如以下图所意:
43.当前位置是固定位置,如果把当前管段详细地址填到其他地方,则相当于以后在自动生成报告时,该管段地址为空。同时,该输入为空时,应该透明显示“请输入当前管段详细地址”的提示,在录像时,该提示内容不叠加到录像中。如果该输入位置已经有内容输入了,则不再显示提示内容。
44.输入的内容平时提示不显示,如果需要有备注的内容或是新增加的内容输入时,就需要在菜单里有一个设置进行选择,如果只选择“备注1”,那就在当前显示屏上显示出“备注1”的提示内容,如果只选择“备注4”,那就只在显示屏上显示出“备注4”的提示内容。
45.只是“提示显示内容”的,在没有输入时,都需要在显示屏上进行显示,但不叠加不录制。如果有输入的内容,则需要把输入的内容进行叠加并录制。
46.时间显示还是保存原来方式,以rtc方式进行;
47.计米器输入保持原来处理方式,接口与旧的一样;
48.增加有无后摄像头选择,最好是在有密码的那个设置里,这个有无后摄像头当作机器人设备的一个配件使用;如果选择了这个功能,显示屏上才有前后摄像头切换的功能,
否则就不具备前后摄像头切换的功能;
49.预留增加通信模块的接口,具有云互联功能,使设备支持云平台数据交换,为以后大数据平台做好硬件支持。这个只需要留有硬件接口,以后升级只升软件不需要升硬件即可。
50.预留支持外挂机械手,满足水质检测、切割、取样等功能加载。需要在车身的硬件留出两个可控的12v/1a接口。
51.预留支持射频信号识别功能,能加装射频数字管材信息识别并云端数据交换。
52.预留数字管材内加装射频数据板,爬行器内加装外挂天线,通过通讯接口把管材内加装的数据信息传到云服务器,将云服务器对应的管材信息传回并显示在录像信息中。
53.手持式pad系统
54.1、使用安卓系统的pad,该pad采用主流的pad,方便采购。pad显示屏的尺寸为10寸左右;
55.2、设置pad的app;
56.3、需要具备pad与机器人的操作箱一对一绑定功能;该功能在系统设置里直接进行操作,同时该设置必须具有密码才能设置。同时在这个设置里,也能进行解绑的功能。
57.4、pad的app具备操作箱的功能,
58.1)显示当前的视频画面与操作箱显示一样(包括操作箱显示屏上显示的所有内容);
59.2)功能菜单与操作箱的内容一样;
60.3)该pad不保存视频,在操作开始录制视频时,实际应该是操作箱同步操作开始录制视频,并把录制视频保存到u盘中;
61.4)在pad上进行视频回放时,回放的视频也为操作箱u盘内保存的视频;
62.5)允许pad显示屏上显示字体与操作箱字体有区别;
63.6)pad不需要操作箱的升级功能;
64.7)pad上新增加快捷键的弹出按钮,实现操作箱的所有键盘快捷键的功能。
65.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。