1.本实用新型涉及智能ai技术领域,尤其涉及一种模块机器人。
背景技术:
2.模块机器人是由标准的相互独立的制造模块组成,每个模块有驱动部分、动力源等,不同的模块组合在一起,由一个信息的控制系统控制,构成具有特殊功能的机器。
3.但是现有技术中,现有的机器人在进行装配时需要记住各个部件的位置,若将位置弄混就会影响到此机器人的正常移动导致需要进行二次拆卸装配,而在二次装配时由于此机器人采用的是磁吸耦合的方式连接,因此就容易接触到其他部件造成部件错位的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,现有的机器人在进行装配时需要记住各个部件的位置,若将位置弄混就会影响到此机器人的正常移动导致需要进行二次拆卸装配,而在二次装配时由于此机器人采用的是磁吸耦合的方式连接,因此就容易接触到其他部件造成部件错位的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种模块机器人,包括控制模块,所述控制模块的底部设置有移动装置,所述移动装置的表面上设置有磁吸模块,所述移动装置包括安装底座,所述安装底座的底部设置有区分模块,所述安装底座的一端设置有阻挡板,所述阻挡板与区分模块之间设置有抓取环,所述安装底座的两侧设置有可调式挡泥板。
6.作为一种优选的实施方式,所述可调式挡泥板的一端设置有收纳支架,所述收纳支架的内部设置有定位导杆,所述可调式挡泥板的内壁上开设有引流槽。
7.作为一种优选的实施方式,所述安装底座的上表面开设有对接凹槽,所述控制模块的底部磁性连接在对接凹槽的内部。
8.作为一种优选的实施方式,所述安装底座的另一端设置有限制分隔环,所述限制分隔环的底部固定连接在安装底座的上表面。
9.作为一种优选的实施方式,所述限制分隔环的内部设置有导向安装槽,所述导向安装槽的接线端活动连接在安装底座的内部。
10.作为一种优选的实施方式,所述定位导杆活动安装在安装底座的内部,所述可调式挡泥板通过设置的收纳支架与安装底座之间活动连接。
11.与现有技术相比,本实用新型的优点和积极效果在于:
12.1、本实用新型中,位于安装底座的多个区分模块用于对磁吸目标进行区分,避免出现安装错误的情况,进一步缩短装配时间,并且相邻的区分模块之间设置有阻挡板与抓取环作为装配时的施力点,从而在已经装配完成之后对一些部件进行位置调整,避免在进行二次调整时触碰到其他部件造成错位的情况。
13.2、本实用新型中,收纳支架将可调式挡泥板收纳在安装底座的内部,在使用时将可调式挡泥板抽出能够在此装置移动时阻挡一部分的雨水可污泥等杂物,从而保持此装置表面的干净程度,而可调式挡泥板的两侧设置有扩展块,方便安装各种不同尺寸的滚轮。
附图说明
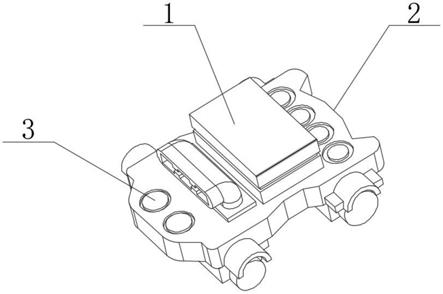
14.图1为本实用新型提出一种模块机器人的立体图;
15.图2为本实用新型提出一种模块机器人的移动装置俯视图;
16.图3为本实用新型提出一种模块机器人的移动装置仰视图;
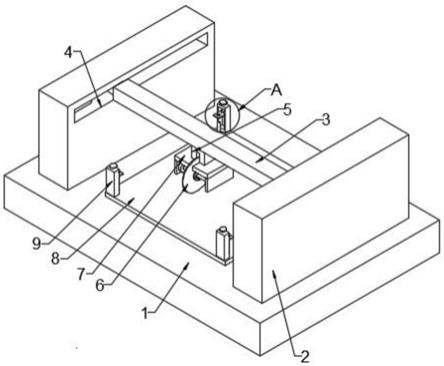
17.图4为本实用新型提出一种模块机器人的可调式挡泥板与安装底座内部结构示意图。
18.图例说明:
19.1、控制模块;2、移动装置;3、磁吸模块;
20.21、安装底座;211、对接凹槽;212、区分模块;213、抓取环;214、阻挡板;215、可调式挡泥板;216、收纳支架;217、定位导杆;218、引流槽;22、限制分隔环;23、导向安装槽。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例1
23.如图1
‑
4所示,本实用新型提供一种技术方案:一种模块机器人,包括控制模块1,控制模块1的底部设置有移动装置2,移动装置2的表面上设置有磁吸模块3,移动装置2包括安装底座21,安装底座21的底部设置有区分模块212,安装底座21的一端设置有阻挡板214,阻挡板214与区分模块212之间设置有抓取环213,安装底座21的两侧设置有可调式挡泥板215,可调式挡泥板215的一端设置有收纳支架216,收纳支架216的内部设置有定位导杆217,可调式挡泥板215的内壁上开设有引流槽218,定位导杆217活动安装在安装底座21的内部,可调式挡泥板215通过设置的收纳支架216与安装底座21之间活动连接。
24.在本实施例中,区分模块212用于对磁吸目标进行区分,避免出现安装错误的情况,进一步缩短装配时间,阻挡板214与抓取环213可作为装配时的施力点,从而在已经装配完成之后对一些部件进行位置调整,避免在进行二次调整时触碰到其他部件造成错位的情况,可调式挡泥板215通过定位导杆217连接在安装底座21的内部,并通过收纳支架216将可调式挡泥板215收纳在安装底座21的内部,在使用时将可调式挡泥板215板抽出能够在此装置移动时阻挡一部分的雨水可污泥等杂物。
25.实施例2
26.如图1
‑
2所示,安装底座21的上表面开设有对接凹槽211,控制模块1的底部磁性连接在对接凹槽211的内部,安装底座21的另一端设置有限制分隔环22,限制分隔环22的底部固定连接在安装底座21的上表面,限制分隔环22的内部设置有导向安装槽23,导向安装槽23的接线端活动连接在安装底座21的内部。
27.在本实施例中,对接凹槽211用于承接控制模块1,使其固定在安装底座21的顶部,随后调节限制分隔环22内的导向安装槽23,使其面向此装置的正前方,并将红外测距传感器安装到导向安装槽23的内部,从而在此装置移动的过程中始终保持红外测距传感器处在稳定的状态。
28.本实施例的工作原理:
29.如图1
‑
4所示,首先利用磁吸模块3将机器人的各个部件连接到安装底座21上,对接凹槽211用于承接控制模块1,随后调节限制分隔环22内的导向安装槽23,并将红外测距传感器安装到导向安装槽23的内部,底部的区分模块212可以对磁吸目标进行区分,而阻挡板214与抓取环213可作为装配时的施力点,在已经装配完成之后对一些部件进行位置调整,可调式挡泥板215通过定位导杆217连接在安装底座21的内部,并通过收纳支架216将可调式挡泥板215收纳在安装底座21的内部,使用时将可调式挡泥板215板抽出能够在此装置移动时阻挡一部分的雨水可污泥等杂物。
30.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
技术特征:
1.一种模块机器人,包括控制模块(1),所述控制模块(1)的底部设置有移动装置(2),所述移动装置(2)的表面上设置有磁吸模块(3),其特征在于:所述移动装置(2)包括安装底座(21),所述安装底座(21)的底部设置有区分模块(212),所述安装底座(21)的一端设置有阻挡板(214),所述阻挡板(214)与区分模块(212)之间设置有抓取环(213),所述安装底座(21)的两侧设置有可调式挡泥板(215)。2.根据权利要求1所述的一种模块机器人,其特征在于:所述可调式挡泥板(215)的一端设置有收纳支架(216),所述收纳支架(216)的内部设置有定位导杆(217),所述可调式挡泥板(215)的内壁上开设有引流槽(218)。3.根据权利要求1所述的一种模块机器人,其特征在于:所述安装底座(21)的上表面开设有对接凹槽(211),所述控制模块(1)的底部磁性连接在对接凹槽(211)的内部。4.根据权利要求1所述的一种模块机器人,其特征在于:所述安装底座(21)的另一端设置有限制分隔环(22),所述限制分隔环(22)的底部固定连接在安装底座(21)的上表面。5.根据权利要求4所述的一种模块机器人,其特征在于:所述限制分隔环(22)的内部设置有导向安装槽(23),所述导向安装槽(23)的接线端活动连接在安装底座(21)的内部。6.根据权利要求2所述的一种模块机器人,其特征在于:所述定位导杆(217)活动安装在安装底座(21)的内部,所述可调式挡泥板(215)通过设置的收纳支架(216)与安装底座(21)之间活动连接。
技术总结
本实用新型提供一种模块机器人,涉及智能AI技术领域,包括控制模块,所述控制模块的底部设置有移动装置,所述移动装置的表面上设置有磁吸模块,所述移动装置包括安装底座,所述安装底座的底部设置有区分模块,所述安装底座的一端设置有阻挡板。本实用新型位于安装底座的多个区分模块用于对磁吸目标进行区分,避免出现安装错误的情况,进一步缩短装配时间,并且相邻的区分模块之间设置有阻挡板与抓取环作为装配时的施力点,从而在已经装配完成之后对一些部件进行位置调整,避免在进行二次调整时触碰到其他部件造成错位的情况,在使用时将可调式挡泥板抽出能够在此装置移动时阻挡一部分的雨水可污泥等杂物。部分的雨水可污泥等杂物。部分的雨水可污泥等杂物。
技术研发人员:刘群鹰 张万杰 徐鑫鑫 吴安然 武泽鹏
受保护的技术使用者:北京六部工坊科技有限公司
技术研发日:2021.07.21
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。