1.本实用新型涉及一种真空包装袋自动装箱机。
背景技术:
2.为了便于搬运、码垛将独立的物料包装成品装入到纸箱内是目前包装企业普遍的方法。由此在自动化生产线上应运而生了自动开箱机、自动装箱机、自动封装机。其中自动装箱机的速度是整个环节中核心设备,其装箱效率直接影响着整条生产线的产量。
3.目前市场上这种装箱机的传动机构大都采用直角坐标系或柱坐标系两种结构和控制方法进箱装箱。特别是直角坐标系形式,由于其控制相对简单被大量装箱机制造企业所采用。但因为在结构上全部采用顶置动力的形式,整个进箱机构都缀在下端形成较长的悬臂结构。这种结构的缺点是受力点(即动力主动点)在整个设备的最高位置,而被移动物体包阔结构的重心却在结构的最下端。这样就形成较长的悬臂,在高速运动时产生晃动也因此产生不稳定性。为了保证设备工作的稳定性大多采用降低速度的方式,也因此这种结构的装箱机装箱效率低下。另外包装抓取机构是装箱机核心部件,其稳定性和自动化程度决定了装箱机的先进程度。目前市场上所提供的装箱机都存在装箱规格单一化,就是不能适应不同规格物料袋的装箱,在出现更换规格品种时需要拆装更换部件结构才能实现,因此造成生产效率低下、适用性差的问题。
技术实现要素:
4.本实用新型的目的在于提供一种真空包装袋自动装箱机,通过将受力点降低以提高包装袋抓取机构移动的稳定性,进而提高了移动速度,通过设置包装袋提手压制捣板以及压制捣板与真空吸盘之间的间距调节机构以适应不同规格的包装袋。
5.为了实现上述目的,本实用新型的技术方案是:
6.一种真空包装袋自动装箱机,包括装箱机机架、两条平行设置的水平导轨、升降柱框架和真空包装袋抓取机构,真空包装袋抓取机构的抓取臂下端设置有真空吸盘,真空吸盘用于抓取真空包装袋,两条水平导轨间隔固定在装箱机机架上,真空包装袋抓取机构通过一个升降机构固定在升降柱框架上,升降柱框架通过承重滑块可滑动的支撑在两条水平导轨上,升降柱框架承受抓取真空包装袋的重力着力点落到了承重滑块与水平导轨的接触面上,一个水平驱动机构驱动升降柱框架沿水平导轨往复移动,其中,水平导轨所处安装位置是在升降机构将真空包装袋抓取机构升起到位后,所述承重滑块与水平导轨的接触面不高于抓取臂长的中间点,所述水平导轨沿纵向两侧中间具有向内凹进槽口,所述承重滑块与升降柱框架固定,承重滑块下端面具有向上的凹槽,凹槽的槽口两侧向内收进,在承重滑块凹槽扣入水平导轨后,承重滑块凹槽的槽口两侧向内收进与水平导轨两侧中间向内凹进槽口相配啮合,所述相配啮合使承重滑块抓住导轨。
7.方案进一步是:驱动升降柱框架的所述水平驱动机构包括在两条水平导轨旁设置由电机带动的水平转动皮带,所述升降柱框架通过传动连接块与水平转动皮带连接,进而
由水平转动皮带带动升降柱框架沿水平导轨往复移动,沿水平导轨前后分别设置有限位传感器。
8.方案进一步是:所述真空包装袋抓取机构的抓取臂有多个,多个抓取臂呈一排间隔设置在一个挂架上,挂架通过靠板与所述升降机构连接,所述升降机构包括两条在升降柱框架上平行设置的垂直升降导轨,靠板通过设置的升降滑块抱住垂直升降导轨,在两条垂直升降导轨旁设有由伺服电机带动的垂直升降皮带,垂直升降皮带通过夹板与靠板固定连接,进而由垂直升降皮带带动挂架及多个抓取臂沿垂直升降导轨同步升降。
9.方案进一步是:所述抓取臂下端设置有真空吸盘固定板,真空吸盘固定板上间隔设置有至少两排气管套,穿入气管套的吸气气管从气管套下端伸出,伸出的气管前端设置所述真空吸盘,在抓取臂下端真空吸盘固定板侧边设置有捣板,捣板由一个捣板气缸控制用于压制包装袋提手边折弯以缩小包装袋在箱体中的占据空间,所述捣板固定在捣板气缸伸缩臂上由伸缩臂带动上下移动,所述捣板气缸连接固定在一水平伸缩机构上,水平伸缩机构带动调节所述捣板与真空吸盘固定板的间距以适不同规格包装袋。
10.方案进一步是:所述水平伸缩机构包括在抓取臂下端侧水平设置的导轨,在导轨上设置有滑块,滑块通过连接板与捣板气缸连接固定,一个驱动装置通过连接板带动滑块沿导轨水平往复滑动,进而带动调节所述捣板与真空吸盘固定板的间距。
11.方案进一步是:所述驱动装置包括由伺服电机驱动的螺杆,螺杆上旋有螺母,螺母与连接板连接固定,伺服电机驱动螺杆转动通过螺母带动连接板沿螺杆前后移动,进而带动滑块沿导轨水平往复滑动。
12.方案进一步是:所述伺服电机通过一个计数轮驱动螺杆转动,一个光电传感器设置在抓取臂上感应计数轮上设置的感光点,在螺杆的两端侧设置有限位传感器,其中一端侧的限位传感器作为初始位置传感器用于确定捣板的初始位置,抓取机构控制器通过初始位置传感器、光电传感器和计数轮以及螺杆螺纹距确定所述捣板与真空吸盘固定板的间距。
13.方案进一步是:所述真空吸盘套在气管出口上,在真空吸盘与气管套底端之间的气管上套有缓冲弹簧。
14.方案进一步是:所述抓取臂通过轴承可转动的设置在挂架上,一个转动驱动装置带动抓取臂做0到180度角往复转动。
15.方案进一步是:所述转动驱动装置包括在所述抓取臂上端侧套有的从动转向齿轮和在挂架上固定设置的滑块,与滑块相套设置有长滑轨,长滑轨上设置有齿条,从动转向齿轮与齿条啮合,一个电机通过电机上的主动转向齿轮与齿条啮合带动齿条在滑块上往复滑动,往复滑动的齿条通过从动转向齿轮带动抓取臂做0到180度角往复转动。
16.本实用新型的有益效果是:结构紧凑,通过将受力点降低以提高包装袋抓取机构移动的稳定性,进而提高了移动速度一倍以上,通过设置包装袋提手压制捣板以及压制捣板与真空吸盘之间的间距调节机构以适应不同规格的包装袋,并且通过设置180度转向机构可以自动的整理装箱。
附图说明
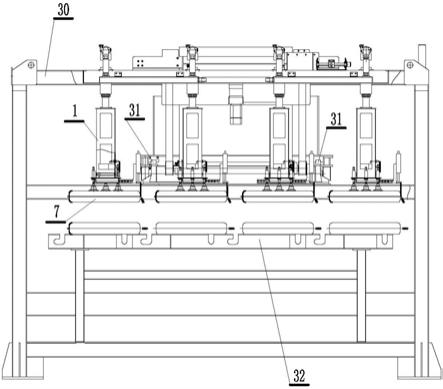
17.图 1是本实用新型结构正面示意图;
18.图 2是本实用新型结构侧面示意图,图1的左向示意图;
19.图3是本发明抓取臂抓取物料袋状态示意图;
20.图4是物料袋装箱后的示意图;
21.图5是平驱动机构和升降机构结构侧面示意图;
22.图6是水平驱动机构和升降机构结构正面示意图,图5的a
‑
a向视图;
23.图 7是水平导轨和承重滑块截面示意图, 图6的a部放大图;
24.图8是抓取臂结构示意图;
25.图9是捣板水平伸缩机构断面示意图;
26.图10是多个抓取臂组装排列示意图;
27.图11是本实用新型结构侧面示意图,图8的左侧视图;
28.图12是本实用新型抓取臂180度转向驱动结构示意图。
具体实施方式
29.下面结合附图和实施例对本实用新型进行详细描述。所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。在本实施例的描述中,需要说明的是,术语“连接”、“置于”应做广义理解,例如“连接”可以是导线连接,也可以是机械连接;“置于”可以是固定连接放置,也可以是一体成形放置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实施例中的具体含义。应当注意,将描述各个方面,其中每个方面可以单独使用或组合使用。也就是说,任何给定的方面都可以用于不同实施例,除非明确表示为纯粹的替代。此外,在下文中为了简单起见,通常总是提及一个项目。然而,除非明确提及,本实施例还可以包括许多特定项目。因此,词语“一”和“一个”的使用应被视为意味着在单个实施例中使用了至少一个项目。
30.一种真空包装袋自动装箱机,如图1和图2所示,包括装箱机机架30、两条平行设置的水平导轨31、升降柱框架和真空包装袋抓取机构,真空包装袋抓取机构的抓取臂1下端设置有真空吸盘6,真空吸盘6用于抓取真空包装袋7,一个真空包装袋输送带32将抽真空的真空包装袋输送至抓取臂1下端,一条包装箱传输带33在真空包装袋输送带32旁穿过机架30,包装箱传输带33传送的包装箱8在抓取臂1下端停留等待抓取臂1将抓取的真空包装袋7装入,在装满后再送出至下一道工序,其中,真空包装袋7有包装袋提手701,在装箱的过程中,如果对包装袋提手701不进行处理会影响装箱质量,为此,如图3和图4所示,在装箱的过程中需要将包装袋提手边折弯以缩小包装袋在箱体中的占据空间,规范装箱,并且,在箱中上下两个包装袋还要调转180度,使得装箱重心匀称。
31.为了实现上述功能动作,如图1和图5、图6和图7所示,所述两条水平导轨31间隔固定在装箱机机架30上,真空包装袋抓取机构通过一个升降机构固定在升降柱框架34上,升降柱框架34通过承重滑块35可滑动的支撑在两条水平导轨31上,升降柱框架承受抓取真空包装袋的重力着力点落到了承重滑块与水平导轨的接触面上,一个水平驱动机构36驱动升降柱框架沿水平导轨31往复移动,其中:为了提高抓取包装袋后升降柱框架的移动速度,水平导轨所处安装位置是在升降机构将真空包装袋抓取机构升起到位后,所述承重滑块与水平导轨的接触面d不高于抓取臂1臂长的中点c,也就是所述水平导轨上端平面水平处于接近真空吸盘的抓取臂下半臂区间。此结构将受力点降低可以提高包装袋抓取机构移动的稳
定性,进而提高了移动速度。提高稳定性除了将受力点降低,本结构还有下面的特点,如图7所示,所述水平导轨沿纵向两侧中间具有向内凹进槽口3101,所述承重滑块35与升降柱框架34固定,承重滑块35下端面具有向上的凹槽3501,凹槽的槽口两侧向内收进3502,在承重滑块35凹槽扣入水平导轨31后,承重滑块凹槽的槽口两侧向内收进与水平导轨两侧中间向内凹进槽口相配啮合,所述相配啮合使承重滑块能够抓住导轨,并且在承重滑块沿水平导轨滑动时可以承受并抑制承重滑块所支撑的升降柱框架由于移动产生受力的晃动。
32.其中:驱动升降柱框架34的所述水平驱动机构36包括由电机带动的主动齿轮3601,主动齿轮通过链条和从动轮带动在两条水平导轨旁设置的水平转动皮带3602,所述升降柱框架34通过传动连接块3603与水平转动皮带连接,进而由水平转动皮带带动升降柱框架沿水平导轨往复移动,沿水平导轨前后分别设置有限位传感器37。
33.其中:如图1和图10所示,所述真空包装袋抓取机构的抓取臂有多个,本实施例是4个,4个抓取臂呈一排间隔设置在一个挂架2上,如图5和图6所示,挂架2通过靠板38与所述升降机构连接,所述升降机构包括两条在升降柱框架上平行设置的垂直升降导轨39,靠板38通过设置的升降滑块40抱住垂直升降导轨39,在两条垂直升降导轨旁设有由伺服电机41带动的垂直升降皮带42,垂直升降皮带通过夹板43与靠板38固定连接,进而由垂直升降皮带带动挂架及多个抓取臂沿垂直升降导轨同步升降。
34.所述真空包装袋抓取机构如图8和11所示,包括抓取臂1,抓取臂上端连接在一个挂架2上,挂架2用于与装箱设备连接,抓取臂下端真空吸盘固定板3上间隔设置有至少两排气管套4,每一排至少有三个气管套,穿入气管套4的吸气气管5与气管套4固定并从气管套4下端伸出,伸出的气管前端设置真空吸盘6,如图6和图7所示,两排真空吸盘从包装袋7平面的中间吸取包装袋装入装箱8,包装袋是真空包装袋,在包装袋一边有包装袋提手701,在装箱的过程中,如果对包装袋提手701不进行处理会影响装箱质量,为此,如图1、图4和图6所示,在抓取臂下端真空吸盘固定板侧边设置有捣板9,捣板由一个捣板气缸控制用于压制包装袋提手边折弯以缩小包装袋在箱体中的占据空间,规范装箱,所述捣板9固定在捣板气缸伸缩臂1001上由伸缩臂带动上下移动,所述捣板气缸连接固定在一水平伸缩机构上,水平伸缩机构带动调节所述捣板与真空吸盘固定板的间距以适不同规格包装袋。
35.如图8,图9以及图11所示,所述水平伸缩机构包括在抓取臂下端侧水平设置的导轨11,在导轨11上设置有滑块12,滑块通过连接板13与捣板气缸连接固定,一个驱动装置通过连接板13带动滑块沿导轨水平往复滑动,进而带动调节所述捣板与真空吸盘固定板的间距,图2中示出了导轨11、滑块12和连接板13有两套,两套导轨11、滑块12和连接板13相对设置。
36.带动连接板13移动的驱动装置有多种,例如通过气缸的伸缩臂带动连接板13移动。作为本实施例的一个优选方案是:所述驱动装置包括由安装在抓取臂上的伺服电机14驱动的螺杆15,螺杆15上旋有螺母16,螺母16与连接板13连接固定,伺服电机驱动螺杆转动通过螺母带动连接板沿螺杆前后移动,进而带动滑块沿导轨水平往复滑动。其中:所述螺杆15穿过两排气管套之间设置。
37.为了精确调节所述捣板与真空吸盘固定板的间距:所述伺服电机通过一个计数轮17驱动螺杆15转动,图1中示意了计数轮17作为主动轮带到一个从动轮18转动,主动轮直径和从动轮直径相同为齿形轮,主动轮通过齿形皮带驱动从动轮转动,一个光电传感器或磁
感应传感器19设置在抓取臂上感应计数轮上设置的感光点或磁感应点,在螺杆的两端侧设置有限位传感器a和b,其中一端侧的限位传感器作为初始位置传感器用于确定捣板的初始位置,抓取机构控制器通过初始位置传感器、光电传感器和计数轮以及螺杆的齿距计算确定所述捣板与真空吸盘固定板的间距。
38.如图8和11所示:所述真空吸盘套在气管出口上,在真空吸盘与气管套底端之间的气管上套有缓冲弹簧20,由于真空吸盘和固定空心导杆的导套的下平面间安装有缓冲弹簧,所以真空吸盘初始状态始终在抓取臂的最下端。当抓取臂下行取物料包装时缓冲弹簧起到缓冲作用,以防止真空吸盘与包装袋的硬接触减少真空吸盘对物料包装的破坏。
39.为了能够有多个工位同时进行装箱,因此:如图10所示,所述挂架2上间隔设置有4个抓取臂1,如图8所示,抓取臂1通过轴承座21和轴承座上的轴承22可转动的设置在挂架2上,从图4中可以看到,为了能够均衡装箱使上下包装袋的提手701不在一边,一个转动驱动装置带动抓取臂1做0到180度角往复转动,从而实现均衡装箱。
40.转动驱动装置可以有多种结构方式,例如每一个抓取臂1配备一个电机驱动,或者采用连杆机构驱动,本实施例中,为了能够同时对多个工位的抓取臂1集中控制同步转动:如图8、图10和图12所示,所述转动驱动装置包括在所述抓取臂上端侧转轴101套有的从动转向齿轮23和在挂架上固定设置的滑块24,与滑块24相套支撑设置有长滑轨25,滑块不动长滑轨滑动,滑轨上设置有齿条26,从动转向齿轮23与齿条26啮合,一个电机27通过电机上转轴上设置的主动转向齿轮28与齿条26啮合带动齿条26在滑块24上往复滑动,往复滑动的齿条26通过从动转向齿轮带动抓取臂1做0到180度角往复转动。所述挂架上间隔设置有4个抓取臂1,所述长滑轨分成两段,两段长滑轨相对交错设置,驱动转向齿轮28设置在相对交错的两段长滑轨25中间,两段长滑轨的齿条分别带动2个抓取臂做0到180度角往复转动,其中的滑块24和齿条26分段设置。
41.上述实施例真空包装袋自动装箱机通过将受力点降低以提高包装袋抓取机构移动的稳定性,进而提高了移动速度一倍以上,通过设置包装袋提手压制捣板以及压制捣板与真空吸盘之间的间距调节机构以适应不同规格的包装袋,并且通过设置180度转向机构可以自动的整理装箱。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。