1.本实用新型涉及垃圾分类技术领域,具体是一种垃圾自动分料装置。
背景技术:
2.随着我国社会经济的快速发展城市化进程的加快以及人民生活水平的迅速提高,城市生产与生活过程中产生的垃圾废物也随之迅速增加,生活垃圾占用土地,污染环境的状况以及对人们健康的影响也越加明显。
3.为了加快“更瘦更绿”的环保工作,急需妥善处理居民生活垃圾处理问题,智能回收显得非常重要,现在市面上回收方式就是都是些很低端的靠人去识别垃圾,十分麻烦,工作效率也大大降低。
技术实现要素:
4.本实用新型的目的在于提供一种垃圾自动分料装置,以解决上述问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种垃圾自动分料装置,包括:
7.输送单元,用于将投入的垃圾输送至对应的垃圾框处;
8.识别单元,用于识别投入的垃圾类型,并将信号传递给控制单元;
9.推料单元,用于将输送单元上的垃圾推出,进入对应的垃圾框内;
10.控制单元,用于接收识别单元的信号,并控制输送单元和推料单元动作;
11.安装架,用于安装输送单元、识别单元、推料单元和控制单元。
12.在上述技术方案的基础上,本实用新型还提供以下可选技术方案:
13.在一种可选方案中:所述输送单元包括爬升段和输送段,所述爬升段用于将投入的垃圾由下向上提升至输送段,所述输送段设于垃圾框上方。
14.在一种可选方案中:所述爬升段和输送段一体式设计,由安装于安装架上的多根输送辊、连接于多根输送辊之间的一条输送带以及用于驱动输送辊转动的动力源构成,所述输送带上间隔安装有多块输送板。
15.在一种可选方案中:所述识别单元包括金属探测件和图像摄录件,所述金属探测件设于输送单元的输入端外侧呈周向分布,所述图像摄录件设于输送单元的输入端上方。
16.在一种可选方案中:所述推料单元其包括刮板和动力机构,所述刮板的数量与垃圾框的数量相等且一一对应,刮板一端延伸至输送单元的上表面,所述动力机构安装于安装架上且驱动连接刮板沿着输送单元的上表面移动。
17.在一种可选方案中:所述控制单元包括控制器,控制器通过连接线路与识别单元、输送单元和推料单元电连接,所述识别单元识别垃圾类型后,将信号反馈给控制器,控制器控制输送单元将垃圾输送至设定位置后停止,控制器控制推料单元将输送单元上的垃圾推出,垃圾进入对应垃圾箱,然后推料单元回到初始位置,输送单元再次启动,进行下次工作循环。
18.在一种可选方案中:所述安装架上位于输送单元一侧设有多个导料斗,导料斗的数量与垃圾框的数量相等且一一对应,所述导料斗用于将推料单元推下的垃圾导入对应的垃圾框内。
19.在一种可选方案中:所述输送单元还包括有张紧组件,用于张紧输送带,设于输送带的输入端和/或输出端,所述张紧组件包括安装座和用于调节安装座位置的调节机构,所述输送辊转动安装于安装座上,调节机构驱动连接安装座,所述安装架上位于输送带下侧间隔安装有多个用于支撑输送带的支撑辊。
20.在一种可选方案中:所述动力机构与刮板活动连接,所述安装架上安装有对刮板进行运动导向的导向件,所述导向件一端插入刮板上开设的插孔内,导向件与插孔间隙配合,导向件与刮板之间连接有弹性件,所述导向件上安装有压紧弹性件的压紧件,导向件另一端贯穿安装架上的导向孔。
21.在一种可选方案中:所述安装架上还安装有调整机构,所述调整机构包括万向脚和支撑座,所述安装架一侧的支撑腿底端安装有万向脚,安装架另一侧的支撑腿底端转动安装有支撑座。
22.相较于现有技术,本实用新型的有益效果如下:
23.1、设有输送单元、识别单元、控制单元、推料单元和安装架,将垃圾由投放口投入,垃圾落到输送单元的输入端,通过识别单元识别垃圾类型后,识别单元将垃圾类型信号反馈给控制单元,控制单元接收信号处理后,控制输送单元将垃圾输送至设定位置后停止,控制单元控制推料单元将输送单元上的垃圾推出,垃圾进入对应垃圾箱,然后推料单元回到初始位置,输送单元再次启动,识别单元再次识别下一个垃圾,进行工作循环,完成对垃圾的分料;
24.2、所述输送单元包括爬升段和输送段,爬升段的目的在于降低投料高度,人们只需要从较低高度就能够将垃圾投入输送单元,更加方便,快捷;
25.3、设有张紧组件,使得输送带保持张紧,输送过程中更加稳定;
26.4、设有调整机构,所述调整机构包括万向脚和支撑座,能够调整输送带的倾斜角度,在推料的时候,更加容易将输送带上的垃圾推下。
附图说明
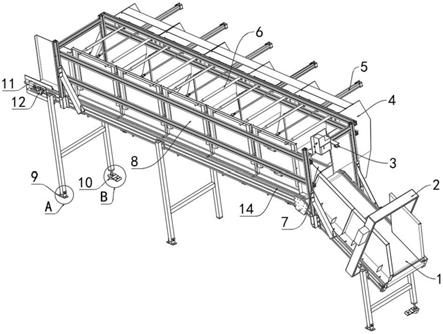
27.图1为本实用新型实施例第一视角的结构示意图。
28.图2为图1中的a处放大图。
29.图3为图1中的b处放大图。
30.图4为本实用新型实施例第二视角的结构示意图。
31.图5为本实用新型实施例第三视角的结构示意图。
32.图6为图5中的局部放大图。
33.图7为本实用新型实施例第四视角的结构示意图。
34.图8为本实用新型实施例第五视角的结构示意图。
35.图9为本实用新型实施例中刮板与导向件连接的结构示意图。
36.附图标记注释:1
‑
爬升段、2
‑
金属探测件、3
‑
图像摄录件、4
‑
导料斗、5
‑
动力机构、6
‑
导向件、7
‑
输送段、8
‑
刮板、9
‑
支撑座、10
‑
万向脚、11
‑
调节螺杆、12
‑
安装座、13
‑
输送板、
14
‑
安装架、15
‑
支撑辊、16
‑
弹性件、17
‑
压紧件。
具体实施方式
37.以下实施例会结合附图对本实用新型进行详述,在附图或说明中,相似或相同的部分使用相同的标号,并且在实际应用中,各部件的形状、厚度或高度可扩大或缩小。本实用新型所列举的各实施例仅用以说明本实用新型,并非用以限制本实用新型的范围。对本实用新型所作的任何显而易知的修饰或变更都不脱离本实用新型的精神与范围。
38.实施例
39.请参阅图1~9,在本实用新型的一个实施例中,一种垃圾自动分料装置,包括:
40.输送单元,用于将投入的垃圾输送至对应的垃圾框处;
41.识别单元,用于识别投入的垃圾类型,并将信号传递给控制单元;
42.推料单元,用于将输送单元上的垃圾推出,进入对应的垃圾框内;
43.控制单元,用于接收识别单元的信号,并控制输送单元和推料单元动作;
44.安装架14,用于安装输送单元、识别单元、推料单元和控制单元;
45.使用时,将垃圾由投放口投入,垃圾落到输送单元的输入端,通过识别单元识别垃圾类型后,识别单元将垃圾类型信号反馈给控制单元,控制单元接收信号处理后,控制输送单元将垃圾输送至设定位置后停止,控制单元控制推料单元将输送单元上的垃圾推出,垃圾进入对应垃圾箱,然后推料单元回到初始位置,输送单元再次启动,识别单元再次识别下一个垃圾,进行工作循环,完成对垃圾的分料。
46.在本实用新型的又一个实施例中,所述输送单元包括爬升段1和输送段7,所述爬升段1用于将投入的垃圾由下向上提升至输送段7,所述输送段7设于垃圾框上方,本实施例中,设置爬升段1的目的在于降低投料高度,人们只需要从较低高度就能够将垃圾投入输送单元,更加方便,快捷。
47.在本实用新型的一个实施例中,所述爬升段1和输送段7一体式设计,由安装于安装架14上的多根输送辊、连接于多根输送辊之间的一条输送带以及用于驱动输送辊转动的动力源构成,所述输送带上间隔安装有多块输送板13,多根输送辊分布于爬升段1和输送段7位置,优选通过轴承与安装架14转动连接,所述动力源优选驱动连接输送带端部的输送辊,更进一步的,所述爬升段1也可以与输送段7分体式设计,爬升段1的输出端位于输送段7上方即可,爬升段1还可以采用螺旋提升、链条提升、丝杆提升等方式,在此不加以限制,还可以选择在爬升段1两侧设置侧板,防止垃圾从两侧掉落。
48.在本实用新型的再一个实施例中,所述识别单元包括金属探测件2和图像摄录件3,所述金属探测件2设于输送单元的输入端外侧呈周向分布,所述图像摄录件3设于输送单元的输入端上方,优选的,所述金属探测件2为金属探测器,所述图像摄录件3为工业相机,更进一步的,金属探测件2可以设置成环形或者矩形等封闭结构,能够充分对垃圾进行环绕式探测,更加准确,金属探测件2和图像摄录件3优选安装在输送单元的输入端,能够在输送的过程中,对输送单元上的垃圾进行识别,工作效率更高。
49.在本实用新型的一个实施例中,所述推料单元其包括刮板8和动力机构5,所述刮板8的数量与垃圾框的数量相等且一一对应,刮板8一端延伸至输送单元的上表面,所述动力机构5安装于安装架14上且驱动连接刮板8沿着输送单元的上表面移动,进一步的,所述
动力机构5可以是气缸、电动推杆或者丝杆进给等方式,本实施例中,优选为气缸。
50.在本实用新型的又一个实施例中,所述控制单元包括控制器,控制器通过连接线路与识别单元、输送单元和推料单元电连接,控制器优选为单片机,当然,控制器还可以通过无线通讯的方式与识别单元、输送单元和推料单元连接,本领域技术人员可以根据现有技术进行选择使用,所述识别单元识别垃圾类型后,将信号反馈给控制器,控制器控制输送单元将垃圾输送至设定位置后停止,控制器控制推料单元将输送单元上的垃圾推出,垃圾进入对应垃圾箱,然后推料单元回到初始位置,输送单元再次启动,进行下次工作循环,对于信号的反馈、接收以及控制启停在现有的自动化设备中已经应用,本领域技术人员完全可以进行借鉴,属于现有技术,在此不再赘述。
51.在本实用新型的一个实施例中,所述安装架14上位于输送单元一侧设有多个导料斗4,导料斗4的数量与垃圾框的数量相等且一一对应,所述导料斗4用于将推料单元推下的垃圾导入对应的垃圾框内,导料斗4主要用于防止垃圾掉入相邻的垃圾框内,起到导向的作用,可由多块板合围拼接构成,其形状、结构在此不多加限制。
52.在本实用新型的另一个实施例中,所述输送单元还包括有张紧组件,用于张紧输送带,设于输送带的输入端和/或输出端,所述张紧组件包括安装座12和用于调节安装座12位置的调节机构,所述输送辊转动安装于安装座12上,调节机构驱动连接安装座12,所述安装架14上位于输送带下侧间隔安装有多个用于支撑输送带的支撑辊15,通过支撑辊15对输送带的下带体进行支撑,防止其掉下,所述调节机构可以是气缸、伸缩杆,又或者是曲柄连杆机构,能够带动安装座12运动即可,不加以限制,如图4,本实施例中,优选调节机构为调节螺杆11和调节螺母,所述安装座12与安装架14滑动连接,安装座12上设有供安装座12滑动的滑槽或滑轨,调节螺杆11与安装座12连接,调节螺杆11贯穿安装架14上的通孔,调节螺杆11上螺纹连接有调节螺母,调节螺母的尺寸大于通孔,调节螺母与安装架14抵触,通过转动调节螺母,带动调节螺杆11运动,调节螺杆11带动安装座12移动,安装座12带动输送辊移动,使得输送带保持张紧,输送过程中更加稳定。
53.在本实用新型的一个实施例中,所述安装架14上还安装有调整机构,如图2
‑
3,所述调整机构包括万向脚10和支撑座9,所述安装架14一侧的支撑腿底端安装有万向脚10,安装架14另一侧的支撑腿底端转动安装有支撑座9,通过调整安装架14一侧支撑腿上的万向脚10,能够使得安装架14绕着另一侧的支撑腿转动,使得整个安装架14倾斜,安装架14上的输送带也发生倾斜,在推料的时候,更加容易将输送带上的垃圾推下。
54.在本实用新型的另一个实施例中,如图7,所述动力机构5与刮板8活动连接,可以通过铰接、球接、万向联轴器连接的方式,所述安装架14上安装有对刮板8进行运动导向的导向件6,所述导向件6一端插入刮板8上开设的插孔内,导向件6与插孔间隙配合,导向件6与刮板8之间连接有弹性件16,所述导向件6上安装有压紧弹性件16的压紧件17,本实施例中,所述导向件6优选为弹簧,所述压紧件17优选为压紧螺母,压紧螺母与导向件螺纹连接,导向件6另一端贯穿安装架14上的导向孔,间隙配合以及弹性件16的设置使得刮板8有一个上下浮动的空间,防止卡料导致推料机构的损坏。
55.本实用新型的工作原理是:具体的,使用时,将垃圾由投放口投入,垃圾落到输送单元的输送带上,通过识别单元的金属探测器和工业相机识别垃圾类型后,识别单元将垃圾类型信号反馈给控制单元,控制单元接收信号处理后,控制输送单元将垃圾输送至设定
位置后停止,也就是将垃圾输送至对应的垃圾箱上方位置,控制单元控制推料单元将输送单元上的垃圾推出,即通过气缸带动刮板8运动,将输送带上的垃圾推出,垃圾落下,在导料斗4的导向作用下垃圾进入对应垃圾箱,然后推料单元回到初始位置,输送单元再次启动,识别单元再次识别下一个垃圾,进行工作循环,完成对垃圾的分料。
56.以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。