1.本发明属于船舶的运动状态管理技术领域,具体地说,涉及一种基于北斗的小型船舶动态管理系统及管理方法。
背景技术:
2.我国是个航运大国,江河、海洋资源非常丰富。航运业在我国高速发展的经济中得到了飞速发展,但在发展的同时,因船舶私营化的扩大和管理体质的老化,船舶管理的弊端也逐渐凸出来,如航运管理不完善、资源浪费、效率低下。因此,如何利用有效的手段将船舶管理上升到有序、合理、高效的管理层面上,成为航运业的当务之急。
3.随着航运发展对信息化管理的迫切要求,船舶监控系统是海上船舶管控的主要手段,主要包括船载终端和系统服务器,一般既要保证船载终端适应海上渔船作业的环境,又要及时完整地将船载终端数据信息传递到系统服务器,以便系统服务器第一时间作出提示(比如是否越界或者其他违规行为),还要适应渔民与船舶管理员之间的动态沟通与交流(如求救和救助行为)。但是,针对小型船舶无法提供船载供电的特点,现有的基于北斗定位的电池型船载终端,无法攻克电池功耗动态管理和船舶状态智能识别,无法将终端监测获得的船舶信号与现有的船舶监管系统进行融合,无法实现小型船舶监测等应用。目前现有的船舶监控系统功能较为单一,大多只具备定位和求救功能,船载终端和系统服务器之间的在线信息交换量小,无法为船舶提供良好的安全保障和科学有效的管理;无法实现低功耗、电池功耗动态管理,无法满足海事监管高精度和高续航要求。另外,由于小型船舶的作业环境非常恶劣,通常采用太阳能电池板或可充电电池,为船载终端供电,但是,太阳能电池板在使用过程中常常出现损坏或被污染物覆盖造成供电功能丧失,从而无法保证船舶的正常监控,且环境适应性差,不易于安装和使用。
技术实现要素:
4.为解决现有技术存在的上述缺陷,本发明提出了一种基于北斗的小型船舶动态管理系统,该系统包括安装在船舶上的船载终端以及用于处理和监控从船舶上接收到的信息的后台中心服务器;
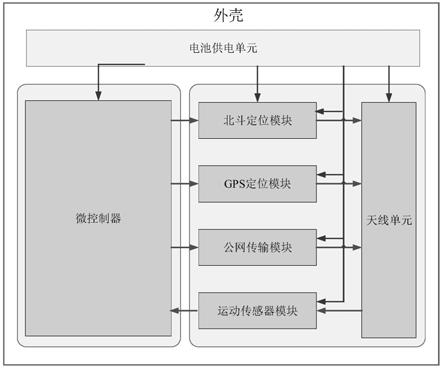
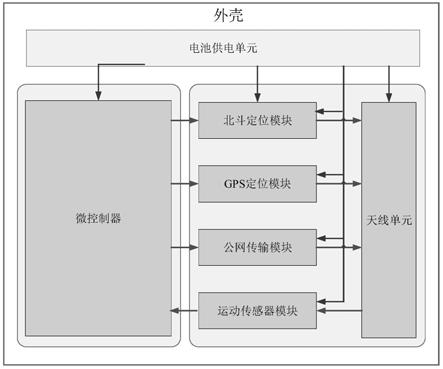
5.所述船载终端包括终端外壳以及安装在终端外壳内的主板、电池和微控制器;
6.所述电池和微控制器分别与主板连接;所述主板与后台中心服务器通讯连接,所述后台中心服务器与监控中心通讯连接。
7.作为上述技术方案的改进之一,所述主板包括:北斗定位与gps定位模块、公网传输模块、运动传感器模块和天线单元;
8.所述北斗定位与gps定位模块,用于获取小型船舶的实时坐标位置信息,通过双模信息融合处理,得到处理后的船舶位置信息;
9.所述公网传输模块,用于将处理后的船舶位置信息通过公网传输至后台中心服务器,并在信号盲区存储未能传输的定位信息,等到有信号的时候,再将其补传至中心服务
器;其中,所述定位信息包括处理后的船舶位置信息;
10.所述运动传感器模块,用于将实时采集的船舶数据,输入至预先建立的船舶运动状态分析模型,输出船舶的运动状态;并将得到的船舶的运动状态结合处理后的船舶位置信息,采用最小二乘估计法,对小型船舶进行动态定位,获取动态定位结果,并将其发送至天线单元;
11.所述天线单元,用于采集和接收小型船舶的船舶数据;并将其发送至运动传感器模块;
12.还用于将获取的动态定位结果,发送至微控制器,进而发送至后台中心服务器,再转发至监控中心,实现对船载终端的准确定位。
13.作为上述技术方案的改进之一,所述公网传输模块,采用gprs网络,提供无线分组数据接入服务,在移动用户和远端的数据网络之间提供一种连接。
14.作为上述技术方案的改进之一,作为上述技术方案的改进之一,所述运动传感器模块采用压电式加速度传感器,实时采集小型船舶的加速度,利用扩展的卡尔曼滤波器进行滤波处理,得到处理后的加速度,作为船舶数据。
15.作为上述技术方案的改进之一,采用期望最大化算法,对船舶运动状态分析模型进行训练;
16.步骤1)建立训练集;利用压电式加速度传感器,采集已知的小型船舶的加速度,利用扩展的卡尔曼滤波器进行滤波处理,得到处理后的加速度,作为船舶训练数据,得到训练样本集x=(x(1),x(2),...x(m));
17.步骤2)输入训练样本集x=(x(1),x(2),...x(m)),联合分布p(x,z;θ),条件分布p(z|x;θ),最大迭代次数j;
18.其中,z为隐变量;θ为模型参数;
19.步骤3)随机初始化模型参数θ的初值θ0;
20.步骤4)开始期望最大化算法迭代:
21.计算联合分布的条件概率期望:
22.q
i
(z
i
)=p(z
i
|x
i
,θ
j
)q
i
(z
i
)=p(z
i
|x
i
,θ
j
)
[0023][0024]
其中,z
i
为隐变量离散取值;x
i
为样本值;
[0025]
极大化l(θ,θ
j
),得到θ
j 1
:
[0026]
θ
j 1
=argmaxl(θ,θ
j
)
[0027]
其中,l(θ,θ
j
)为似然函数;θ
j 1
为使似然函数最大化的调整值;
[0028]
判断θ
j 1
是否收敛;
[0029]
如果θ
j 1
已经收敛,则算法结束,并将该结果作为船舶的运动状态的收敛函数;
[0030]
如果θ
j 1
未收敛,则继续进行上述迭代过程;如果迭代次数已达到j次,则停止迭代,直至θ
j 1
收敛;
[0031]
利用船舶的运动状态的收敛函数进行分类,得到船舶的运动状态;
[0032]
得到训练好的船舶运动状态分析模型。
[0033]
作为上述技术方案的改进之一,所述电池单元为自放电率极低的一次性电池,用
于对微控制器和主板供电。
[0034]
作为上述技术方案的改进之一,所述控制器为低功耗控制器,用于根据运动传感器模块发送的船舶的运动状态,控制主板内的各个模块进行逻辑控制,以及对电池单元进行逻辑控制。
[0035]
作为上述技术方案的改进之一,所述后台中心服务器,用于存储从主板接收到的动态定位结果和备份数据库。
[0036]
本发明还提供了一种基于北斗的小型船舶动态管理方法,该方法包括:
[0037]
北斗定位与gps定位模块获取小型船舶的实时坐标位置信息,通过双模信息融合处理,得到处理后的船舶位置信息;
[0038]
通过公网传输模块,将处理后的船舶位置信息通过公网传输至后台中心服务器,并在信号盲区存储未能传输的定位信息,等到有信号的时候,再将其补传至中心服务器;其中,所述定位信息包括处理后的船舶位置信息;
[0039]
天线单元将接收的船舶数据发送至运动传感器模块,运动传感器模块将实时采集的船舶数据,输入至预先建立的船舶运动状态分析模型,输出船舶的运动状态;并将得到的船舶的运动状态结合处理后的船舶位置信息,采用最小二乘估计法,对小型船舶进行动态定位,获取动态定位结果,并将其发送至天线单元;
[0040]
所述天线单元将获取的动态定位结果,发送至微控制器,进而发送至后台中心服务器,再转发至监控中心,实现对船载终端的准确定位。
[0041]
本发明与现有技术相比的有益效果是:
[0042]
1、本发明的该终端具有bd/gps、基站多种方式混合定位,实现定位无盲区;集合智能运动传感器,准确记录终端运行轨迹,并通过gprs网络智能上报至平台;内置大容量电池,采用智能电源管理算法,支持超长时间工作。
[0043]
2、终端采用内置电池供电,可使用三年,回报的点位不低于28000个;能有效的识别出船舶是静止状态还是运动状态,从而在船舶静止状态下能有效的节约电池使用;bd2/gps/lbs基站等多种方式混合定位;通过gprs/3g网络进行传输和配置;运动状态下每5分钟回报一次位置(时间间隔可设置);在信号盲区能将位置信息存储在本地,等有信号的时候补传到中心服务器。
[0044]
3、选用自放电率极低的电池和低功耗微控制器,降低电源和微控制器的基本功耗,提高电源转换效率;
[0045]
4、通过在天线单元上存储卫星星历,减少定位模块启动后搜星的时间,提高模块的定位效率,从而减短定位模块单次定位的定位时间来降低一次定位的功耗;
[0046]
5、选用低功耗的三轴加速传感器,降低传感器的采集频率,进一步降低整个系统的功耗,提高电池使用寿命。
附图说明
[0047]
图1是本发明的一种基于北斗的小型船舶动态管理系统的结构示意图;
[0048]
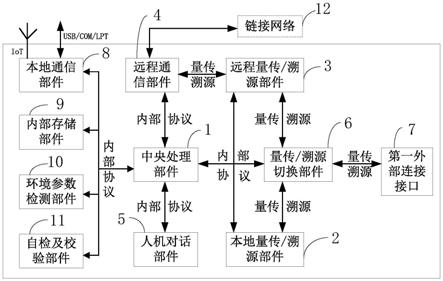
图2是本发明的一种基于北斗的小型船舶动态管理系统的公网传输模块所采用的gprs网络的工作原理图。
具体实施方式
[0049]
现结合附图对本发明作进一步的描述。
[0050]
实施例1.
[0051]
本发明提供了一种基于北斗的小型船舶动态管理系统,根据船舶运动状态切换船载终端的工作模式,采用三轴加速度传感器作为运动传感器的数据采集器,利用机器学习的方式对船舶的运动状态和静止等状态下加速度传感器获取的数据进行学习,并建立船舶运动状态分析模型,达到获取船舶运动状态的目的。
[0052]
如图1所示,该系统包括安装在船舶上的船载终端以及用于处理和监控从船舶上接收到的信息的后台中心服务器;
[0053]
所述船载终端包括终端外壳以及安装在终端外壳内的主板、电池和微控制器;
[0054]
所述电池和微控制器分别与主板连接;所述主板与后台中心服务器通讯连接,所述后台中心服务器与监控中心通讯连接。
[0055]
如图1所示,所述主板包括:北斗定位与gps定位模块、公网传输模块和运动传感器模块和天线单元;
[0056]
所述北斗定位与gps定位模块,用于获取小型船舶的实时坐标位置信息,通过双模信息融合处理,得到处理后的船舶位置信息;
[0057]
所述公网传输模块,用于将处理后的船舶位置信息通过公网传输至后台中心服务器,并在信号盲区存储未能传输的定位信息,等到有信号的时候,再将其补传至中心服务器;其中,所述定位信息包括处理后的船舶位置信息;
[0058]
其中,所述公网传输模块,采用gprs网络,提供无线分组数据接入服务,在移动用户和远端的数据网络之间提供一种连接。
[0059]
gprs网络分为无线接入和核心网络两个部分,无线接入部分是在移动台(ms)与基站子系统(bss)之间传输数据,核心网络在bss与标准数据通信网边界网关之间中继传输数据。按gsm规范提出的基本结构,bss由两个基本部分组成:通过无连接口与移动台一侧相连的基站收、发信机(bts)和与交换机一侧相连的基站控制器(bsc)。
[0060]
gsn是gprs网络中最重要的网络节点。gsn具有移动路由管理功能,它可以连接各种类型的数据网络,并可以连到gprs寄存器。gsn可以完成移动台和各种数据网络之间的数据传送和格式转换。gsn可以是一种类似于路由器的独立设备,也可以与gsm中的msc集成在一起。
[0061]
gsn有两种类型:一种为sgsn(serving gsn,服务gsn),另一种为ggsn(gateway gsn,网关gsn),sgsn的主要作用是记录移动台的当前位置信息,并且在移动台和ggsn之间完成移动分组数据的发送和接收。ggsn主要是起网关作用,它可以和多种不同的数据网络连接,如isdn、pspdn和lan等。有的文献中,把ggsn称为gprs路由器。ggsn可以把gsm网中的gprs分组数据包进行协议转换,从而可以把这些分组数据包传送到远端的tcp/ip或x.25网络。
[0062]
其中,如图2所示,gprs网络的工作原理体现在它的分组数据路由传输和传输协议模式上,用户通讯数据通过串行或无线方式连接到gprs终端上,然后gprs终端与gsm基站通信,这种方式与电路交换式数据呼叫不同,gprs分组是从基站发送到gprs服务支持节点(sgsn),而不是通过移动交换中心(msc)连接到语音网络上。因此,sgsn与gprs网关支持节
点(ggsn)进行通信,ggsn对分组数据进行相应的处理后,再发送到目的网络,如internet或x.25网络。
[0063]
如图2所示,其具体的数据传输流程分为四步:
[0064]
第一步:用户设备通过串行接口向gprs终端传输小型船舶的定位结果;
[0065]
第二步:经过处理后的gprs分组数据发送到gsm基站;
[0066]
第三步:分组数据经gsm基站的sgsn封装后,然后发送到gprs骨干网;
[0067]
第四步:在gprs网关支持节点ggsn对sgsn分组数据进行相应的处理后,再发送到目的网络移动台(ms),和gprs之间的分层传输协议模型主要由gtpllc和rlc协议构成,um接口是gsm的空中接口,um接口上的通信协议有5层,自下而上依次为物理层、mac层、llc层、sndc层和网络层,rlc/mac为无线链路控制、媒质接入控制层,llc层为逻辑链路控制层,gtp是将用户数据及信令用隧道技术在gprs网络gsn节点之间传送。
[0068]
gprs网络采用的um接口是gsm的空中接口。um接口上的通信协议有5层,自下而上依次为物理层、mac medium access control)层、llc(logical link control)层、sndc(subnetwork dependant convergence)层和网络层。
[0069]
um接口的物理层为射频接口部分,而物理链路层则负责提供空中接口的各种逻辑信道。gsm空中接口的载频带宽为20okhz,一个载频分为8个物理信道。如果8个物理信道都分配为传送gprs数据,则原始数据速率可达20okb/s。考虑前向纠错码的开销,则最终的数据速率可达164kb/s左右。
[0070]
mac为媒质接入控制层。mac的主要作用是定义和分配空中接口的gprs逻辑信道,使得这些信道能被不同的移动台共享。gprs的逻辑信道共有3类,分别是公共控制信道、分组业务信道和gprs广播信道。公共控制信道用来传送数据通信的控制信令,具体又分为寻呼和应答等信道。分组业务信道用来传送分组数据。广播信道则是用来给移动台发送网络信息。
[0071]
llc层为逻辑链路控制层。它是一种基于高速数据链路规程hdlc的无线链路协议。llc层负责在高层sndc层的sndc数据单元上形成llc地址、帧字段,从而生成完整的llc帧。另外,llc可以实现一点对多点的寻址和数据帧的重发控制。
[0072]
bss中的llr层是逻辑链路传递层。这一层负责转送ms和sgsn之间的llc帧。llr层对于sndc数据单元来说是透明的,即不负责处理sndc数据。sndc被称为子网依赖结合层。它的主要作用是完成传送数据的分组、打包,确定tcp/ip地址和加密方式。在sndc层,移动台和sgsn之间传送的数据被分割为一个或多个sndc数据包单元。sndc数据包单元生成后被放置到llc帧内。
[0073]
网络层的协议目前主要是phase1阶段提供的tcp/ip和l25协议。tcp/ip和x.25协议对于传统的gsm网络设备(如bss和nss等设备)是透明的。
[0074]
在gprs网络传输中,常用的有两种传输协议,即tcp和用户数据报协议udp它们都是使用ip作为网络层协议,每组数据都通过端系统和每个中间路由器中的ip层在互联网中进行传输tcp主要负责把应用程序交给它的数据分成合适的小块然后再交给下面的网络层确认接收到的分组设置发送最后确认分组的超时时钟等,是为两台主机提供高可靠性的数据通信。
[0075]
udp协议与tcp协议最大的不同表现在数据传输的可靠性上,udp协议是一种不可
靠的或最尽力的协议,它本身不提供可靠的数据传输,但并不意味着在udp协议之上就不能有可靠的数据传输。在网络传输中使用udp协议的应用程序要负责实施重传过滤多余信息等等。如果一个udp包在传输过程中丢失或者损坏,需要引起发送数据的应用程序注意才行。
[0076]
所述运动传感器模块,用于将实时采集的船舶数据,输入至预先建立的船舶运动状态分析模型,输出船舶的运动状态;并将得到的船舶的运动状态结合处理后的船舶位置信息,采用最小二乘估计法,对小型船舶进行动态定位,获取动态定位结果,并将其发送至天线单元;
[0077]
采用监督式学习方式,建立船舶运动状态分析模型,判断小型船舶的运动状态,并将判断结果发送至微控制器;能根据运动状态对电路进行逻辑控制;
[0078]
具体地,所述运动传感器模块采用压电式加速度传感器,实时采集小型船舶的加速度,利用扩展的卡尔曼滤波器进行滤波处理,得到处理后的加速度,作为船舶数据。
[0079]
采用期望最大化算法,对船舶运动状态分析模型进行训练;
[0080]
步骤1)建立训练集;利用压电式加速度传感器,采集已知的小型船舶的加速度,利用扩展的卡尔曼滤波器进行滤波处理,得到处理后的加速度,作为船舶训练数据,得到训练样本集x=(x(1),x(2),...x(m));
[0081]
步骤2)输入训练样本集x=(x(1),x(2),...x(m)),联合分布p(x,z;θ),条件分布p(z|x;θ),最大迭代次数j;
[0082]
其中,z为隐变量;θ为模型参数;
[0083]
步骤3)随机初始化模型参数θ的初值θ0;
[0084]
步骤4)开始期望最大化算法迭代:
[0085]
计算联合分布的条件概率期望:
[0086]
q
i
(z
i
)=p(z
i
|x
i
,θ
j
)q
i
(z
i
)=p(z
i
|x
i
,θ
j
)
[0087][0088]
其中,z
i
为隐变量离散取值;x
i
为样本值;
[0089]
极大化l(θ,θ
j
),得到θ
j 1
:
[0090]
θ
j 1
=argmaxl(θ,θ
j
)
[0091]
其中,l(θ,θ
j
)为似然函数;θ
j 1
为使似然函数最大化的调整值;
[0092]
判断θ
j 1
是否收敛;
[0093]
如果θ
j 1
已经收敛,则算法结束,并将该结果作为船舶的运动状态的收敛函数;
[0094]
如果θ
j 1
未收敛,则继续进行上述迭代过程;如果迭代次数已达到j次,则停止迭代,直至θ
j 1
收敛;
[0095]
利用船舶的运动状态的收敛函数进行分类,得到船舶的运动状态;
[0096]
得到训练好的船舶运动状态分析模型。
[0097]
所述天线单元,用于采集和接收小型船舶的船舶数据;并将其发送至运动传感器模块;
[0098]
还用于接收卫星信号,将获取的动态定位结果,发送至微控制器,进而发送至后台中心服务器,再转发至监控中心,实现对船载终端的准确定位。
[0099]
所述电池单元为自放电率极低的一次性电池,用于对微控制器和主板供电。
[0100]
所述控制器为低功耗控制器,用于对主板内的各耗电电路和供电电路进行逻辑控制,以及对电池单元进行功耗控制,实现对电池功耗的动态管理。
[0101]
具体地,所述微控制器,用于根据运动传感器模块发送的船舶的运动状态,控制主板内的各个模块进行逻辑控制,以及对电池单元进行逻辑控制;
[0102]
所述后台中心服务器,用于存储从主板接收到的动态定位结果和备份数据库;其中,所述动态定位结果包括船舶的运动状态。
[0103]
采用超低功耗硬件电路设计技术,通过选用自放电率极低的电池和低功耗微控制器,提高电源转换效率,加快模块定位时间,降低整机工作电压,减少整机静态电流等方面降低硬件电路功耗,完成硬件电路设计。同时,对终端各耗电电路供电电路进行逻辑控制,当使用到某个单元时给某个单元供电,当不使用某个单元时即断开该单元的供电。
[0104]
在终端内集成三轴加速度传感器,高速、灵敏的采集三维加速度值,分别对应水平方向(x、y方向)和垂直方向(z方向)。当设备安装载体运动状态发生改变时,其输出加速度值的统计特性随之改变。采集不同船舶状态下加速度数据,对采集的加速度数据集合利用机器学习的方法,找出船舶各个不同运动状态下的参数特征,建立船舶运动状态分析数学模型,实现船舶运动状态的动态求解。
[0105]
在使用低功耗电路的同时,结合船舶运动状态对电路功耗进行动态管理,智能改变数据采集与上报的频度,进一步降低整机功耗。船舶在实际使用过程中的运动状态可分为静止、高速运动、低速运动、转向等。静止状态上船舶在定位一次后可不用再更新位置,低速运动时数据采集和上报的频度低,高速和转向时数据采集和上报的频度高。
[0106]
实施例2.
[0107]
本发明还提供了一种基于北斗的小型船舶动态管理方法,该方法包括:
[0108]
北斗定位与gps定位模块获取小型船舶的实时坐标位置信息,通过双模信息融合处理,得到处理后的船舶位置信息;
[0109]
通过公网传输模块,将处理后的船舶位置信息通过公网传输至后台中心服务器,并在信号盲区存储未能传输的定位信息,等到有信号的时候,再将其补传至中心服务器;其中,所述定位信息包括处理后的船舶位置信息;
[0110]
天线单元将接收的船舶数据发送至运动传感器模块,运动传感器模块将实时采集的船舶数据,输入至预先建立的船舶运动状态分析模型,输出船舶的运动状态;并将得到的船舶的运动状态结合处理后的船舶位置信息,采用最小二乘估计法,对小型船舶进行动态定位,获取动态定位结果,并将其发送至天线单元;
[0111]
所述天线单元将获取的动态定位结果,发送至微控制器,进而发送至后台中心服务器,再转发至监控中心,实现对船载终端的准确定位。
[0112]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。