1.本发明涉及车辆测试技术领域,具体涉及商用车盲区监视系统的评价系统及评价方法。
背景技术:
2.商用车包含了所有的载货汽车和九座以上的客车,商用车的体积较大,其后视镜存在较 大的视野盲区,容易造成交通事故。为解决视野盲区不可预知的安全隐患,商用车上的盲区 监视系统受广泛重视并逐渐应用。
3.盲区监视系统的有效与否关系着商用车的安全监视结果的准确性,目前,针对盲区监视 系统的有效性评价,通常是通过仿真试验进行评价,但是因实际路况是复杂多变,仿真试验 验证盲区监视系统存在一定的偏差,在实际的道路上可能还是无法准确监测到盲区的情况。
技术实现要素:
4.本发明意在提供一种商用车盲区监视系统的评价系统,以评价盲区监视系统的准确性。
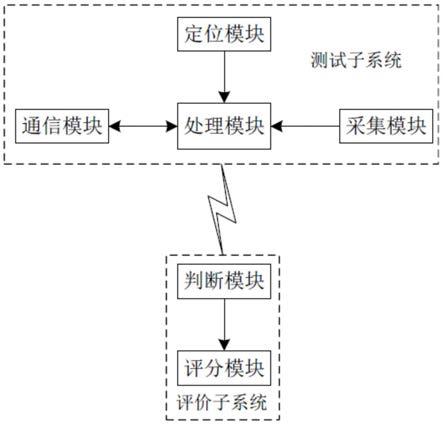
5.本方案中的商用车盲区监视系统的评价系统,包括测试子系统和评价子系统,所述测试 子系统向评价子系统发送测试结果信息;
6.所述测试子系统包括定位模块、采集模块、通信模块和处理模块;
7.定位模块,检测测试车辆和目标车辆的实时速度和位置信息;
8.采集模块,位于预设车道上行驶的测试车辆上,采集盲区监视系统的报警信号,发送至 处理模块;
9.处理模块,位于预设车道上行驶的测试车辆上,用于获取实时速度、位置信息和报警信 号并进行判断,当实时速度等于预设速度时,所述处理模块根据位置信息判断目标车辆是否 位于测试车辆的预设区域内,并判断在预设区域内是否收到报警信号,所述处理模块将获取 的报警信号、获取报警信号的位置信息形成测试结果信息,发送至通信模块;
10.通信模块,位于预设车道上行驶的测试车辆上,接收处理模块的测试结果信息发送至评 价子系统;
11.所述评价子系统包括判断模块和评分模块;
12.判断模块,用于获取通信模块的测试结果信息,判断测试结果信息所达到的评分条件, 并将评分条件发送至评分模块;
13.评分模块,用于根据评分条件生成测试评分的评价结果。
14.本方案的有益效果是:
15.通过定位模块对测试车辆和目标车辆的实时速度、位置信息进行检测,由采集模块获取 测试车辆上的盲区监视系统监测到预设区域内目标车辆的报警信号,让处理模块根据实时速 度进行目标车辆是否位于预设区域的判断,并根据获取报警信号的位置信息
形成测试结果信 息;让判断模块进行测试结果信息的评分条件的判断,由评分模块根据评分条件进行评分形 成评价结果。让测试车辆和目标车辆在实际道路上进行实际行驶,然后采集信息进行盲区监 视系统监视结果的判断,提高商用车上盲区监视系统评价的准确性。
16.进一步,所述处理模块获取目标车辆的车型,根据车型获取预存的预设速度进行判断。
17.有益效果是:根据车型在目标车辆的实时速度达到预设速度时,进行评价判断,让测试 条件更符合实际需求,提高盲区监视系统评价的准确性。
18.进一步,所述预设区域包括盲区和预警区,所述评分模块根据评分条件中的预设区域位 置生成测试评分。
19.有益效果是:根据不同位置生成测试评分,能够准确表征盲区监视系统的盲区监视灵敏 度。
20.商用车盲区监视系统的评价方法,包括以下步骤:
21.步骤一,根据道路类型让测试车辆和目标车辆在预设车道上以预设间距、预设的初始速 度同向行驶,让测试车辆和目标车辆的实时速度稳定至多个预设速度时启动进行多次评价试 验,目标车辆的实时速度大于测试车辆的实时速度;
22.步骤二,对测试车辆左侧和右侧预设区域进行监视,获取盲区监视系统的报警信号,根 据目标车辆在预设区域内的位置判断是否获取到报警信号,根据是否获取到报警信号进行评 分得到评价结果;
23.步骤三,当目标车辆行驶过结束线设定距离时,结束试验。
24.本方案的有益效果是:
25.让待评价的测试车辆与目标车辆实时在预设车道上行驶,然后设定好试验条件,评价目 标车辆位于测试车辆作为盲区的预设区域内的报警信号,根据报警信息进行评分得到评价结 果,提高商用车上盲区监视系统评价的准确性。
26.进一步,所述步骤一中,所述道路类型城市道路、城市郊区道路和高度道路,所述目标 车辆包括多种车型,根据多种道路类设置目标车辆和测试车辆的预设速度。
27.有益效果是:针对不同的道路,根据车型以不同的预设速度进行试验,提高商用车实际 行驶情况的覆盖度,让评价结果更准确。
28.进一步,预设间距包括测试车辆和目标车辆的横向间距和纵向间距,根据目标车辆的车 型设置横向间距和纵向间距,根据目标车辆的车型设置不同的设定距离。
29.有益效果是:根据车型以不同的预设间距进行试验,测试车辆遇到不同类型目标车辆的 情况覆盖更完整。
30.进一步,所述步骤二中,所述预设区域包括盲区和预警区,根据收到报警信号在预设区 域中的位置形成具有唯一评分值的评分条件。
31.有益效果是:根据预设区域内的不同区域进行评分,准确限定盲区监视系统的灵敏度。
附图说明
32.图1为本发明实施例一商用车盲区监视系统的评价系统的示意性框图;图2为本发明实施例一中车辆左侧和右侧的预设区域示意图。
具体实施方式
33.下面通过具体实施方式进一步详细说明。
34.实施例一
35.商用车盲区监视系统的评价系统,如图1所示:包括测试子系统和评价子系统,测试子 系统向评价子系统发送测试结果信息。
36.测试子系统包括定位模块、采集模块、通信模块和处理模块。
37.定位模块,检测测试车辆和目标车辆的实时速度和位置信息,定位模块包括惯导定位单 元、gps天线和固定基站,惯导定位单元检测测试车辆和目标车辆的实时速度和位置信息, gps天线和固定基站接收gps信号并对测试车辆和目标车辆进行差分定位,提高定位精度。
38.采集模块,位于预设车道上行驶的测试车辆上,采集盲区监视系统的报警信号,发送至 处理模块,采集模块通过从测试车辆上的盲区监视系统直接获取报警信号。
39.处理模块,位于预设车道上行驶的测试车辆上,用于获取实时速度、位置信息和报警信 号并进行判断,处理模块可用后台的云端服务器,当实时速度等于预设速度时,处理模块根 据位置信息判断目标车辆是否位于测试车辆的预设区域内,并判断在预设区域内是否收到报 警信号,处理模块获取目标车辆的车型,根据车型获取预存的预设速度进行判断,预设区域 包括盲区和预警区,处理模块将获取的报警信号、获取报警信号的位置信息形成测试结果信 息,发送至通信模块。
40.通信模块,位于预设车道上行驶的测试车辆上,接收处理模块的测试结果信息发送至评 价子系统,通信模块可用现有的4g通信模块。
41.评价子系统包括判断模块和评分模块。
42.判断模块用于获取通信模块的测试结果信息,判断测试结果信息所达到的评分条件,并 将评分条件发送至评分模块。
43.评分模块用于根据评分条件生成测试评分的评价结果,评分模块根据评分条件中的预设 区域位置生成测试评分。
44.基于上述商用车盲区监视系统的评价系统的商用车盲区监视系统的评价方法,以测试车 辆和小型轿车为例,包括以下步骤:
45.步骤一,测试车辆和目标车辆在两条相邻的直线车道作为预设车道上行驶,目标车辆和 测试车辆的方向一致,在达到测试开始前,测试车辆和目标车辆中心线保持平行,根据道路 类型让测试车辆和目标车辆在预设车道上以预设间距、预设的初始速度同向行驶,预设间距 包括测试车辆和目标车辆的横向间距和纵向间距,根据目标车辆的车型设置横向间距和纵向 间距,让测试车辆和目标车辆的实时速度稳定至多个预设速度时启动进行多次评价试验,目 标车辆的实时速度大于测试车辆的实时速度;道路类型城市道路、城市郊区道路和高度道路, 测试车辆和目标车辆的横向距离应为1.5m,测试车辆和目标车辆的纵向间距和预设速度如表 1所示。
46.表1车辆车速和间距设置表
[0047][0048]
步骤二,对测试车辆左侧和右侧预设区域进行监视,预设区域包括盲区和预警区,预设 车道的设置根据现有标准进行设置,如图2所示,图中:线a平行于测试车辆后缘,并位于 测试车辆后缘外部30.0m处;线b平行于测试车辆后缘,并位于测试车辆后缘后部3.0m处; 线c,若测试车辆m1、n1类,线c位于第九十五百分位眼椭圆的中心,并平行于测试车辆后 缘,若测试车辆为m2、n2、m3、n3类,线c重合于车辆左右后视镜的延长线;线d为测试 车辆前缘的双向延长线;线e平行于测试车辆的中心线,并位于测试车辆车身(不包括外后 视镜)左侧的最外缘;线f平行与测试车辆的中心线,并位于测试车辆车身左侧最外缘的左 边,与左侧最外缘相距0.5m;线g平行于测试车辆的线,并位于测试车辆车身左侧最外缘的 左边,与左侧最外缘相距3.0m;线h平行于测试车辆的中心线,并位于测试车辆车身左侧最 外缘的左边,与左侧最外缘相距6.0m;线j平行于测试车辆的中心线,并位于测试车辆车身 (不包括外后视镜)右侧的最外缘;线k平行于测试车辆的中心线,并位于测试车辆车身右 侧最外缘的右边,与右侧最外缘相距0.5m;线l平行于试验车辆的中心线,并位于试验车辆 车身右侧最外缘的右边,与右侧最外缘相距3.0m;线m平行于测试车辆的中心线,并位于测 试车辆车身右侧最外侧的右边,与右侧最外缘相距6.0m;线n为试验车辆后缘的双向延长线; 线o平行于测试车辆后缘,与测试车辆后缘相距10.0m;1为测试车辆,2为第九十五百分位 眼椭圆的中心,3为由fcgb围成的左侧盲区监视区域,4为由lckb围成的右侧盲区监视区 域,5为由abfg围成的左侧预警区域,6为由abkl围成的右侧预警区域。
[0049]
步骤三,根据目标车辆的车型设置不同的设定距离,当目标车辆行驶过结束线设定距离 时,结束试验。
[0050]
步骤四,在结束试验后,通过判断模块获取测试结果信息,并判断结果信息所达到的评 分条件,让评分模块根据评分条件生成测试评分得到评价结果,测试结果信息通过采集到的 位置信息和报警信号进行表示,然后将采集到报警信号的位置信息与预存的理论报警位置作 为评分条件进行匹配,根据匹配结果生成测试评分,多个速度对应条件下的评分取平均分进 行评价。
[0051]
在试验过程中,通过采集模块获取盲区监视系统的报警信号,根据目标车辆在预设区域 内的位置判断是否获取到报警信号,例如当目标车辆通过a线时,未获取到报警信号,在目 标车辆位于盲区监视区域时收到报警信号,根据是否获取到报警信号进行评分得到评价结 果,包括以下评分条件:a,目标车辆完全位于a线之后时,盲区监视系统(bsd)不应发出警 告;当目标车辆的任何部分位于试验车辆的盲区监视区域时,系统应发出警告,警告发出的 时间不得晚于目标车辆前缘穿过b线后300ms,根据收到报警信号在预设区域中的位置形成 具有唯一评分值的评分条件,如表2所示。
[0052]
表2评分条件表
[0053][0054]
本实施例一通过让测试车辆与目标车辆之间以不同的速度进行超越路况的测试,提高实 际路况测试的覆盖程度,让盲区监视系统的测试结果更准确,并通过评分来表示测试结果, 让测试结果更直观。
[0055]
实施例二
[0056]
与实施例一的区别在于,目标车辆包括多种车型,根据多种道路类设置目标车辆和测试 车辆的预设速度,本实施例二以两轮车作为目标车辆进行试验,两轮车记录为目标两轮车。 其中,测试车辆以40km/h匀速行驶,目标两轮车以50km/h匀速行驶于测试车辆侧后方。试 验开始前,两车间的纵向距离应至少为30m,两轮车靠近测试车辆的车身最外缘与测试车辆 的中心线之间的距离为2.0m
‑
3.5m。目标两轮车匀速行驶并逐渐超越测试车辆,当目标车辆 完全超越c线3m时,试验结束。测试完成后应在测试车辆另一侧重复进行该试验。
[0057]
当目标两轮车从侧后方行驶进入试验车辆盲区监视范围时,盲区监视系统应发出警告, 警告发出的时间不得晚于目标两轮车前缘穿过c线。
[0058]
对目标车辆进行并道测试,测试车辆位于三车道试验道路,以50km/h匀速行驶于最左 侧车道或最右侧车道,目标车辆位于测试车辆侧后方,以50km/h匀速行驶于最右侧车道或 最左侧车道。测试开始前,目标车辆的车头应越过b线,且不超过c线,两车的横向距离应 为6.0m~7.0m。当目标车辆和测试车辆车速达到稳定时,测试开始。目标车辆以0.25m/s~ 0.75m/s的侧向速度向相邻车道变道,在试验过程检测盲区监测系统的报警信号,变道完成 后至少保持直线行驶300ms后变回原道,试验结束。如表3所示评分条件进行评分。针对不 同的评价目标,由评分模块根据评价目标使用预设权重值对测试车辆上的盲区监视系统进行 评分得到评价结果,其中目标车辆超越测试在多种速度下测试得到的评分取平均分后乘以对 应的权重值,如表4所示。
[0059]
表3评分条件表
[0060][0061]
表4评分权重表
[0062]
目标车辆超越测试目标两轮车识别测试目标车辆并道测试0.40.30.3
[0063]
本实施例二通过对两轮车以及目标车辆的并道行驶路况进行测试,并根据满足的不同条 件进行评分,能够提高不同监视目标在不同工况下的测试的准确性。
[0064]
实施例三
[0065]
与实施例二的区别在于,商用车盲区监视系统的评价系统,还包括识别模块、存储模块 和位于测试车辆上拍摄盲区所在侧目标车辆场景图像的拍摄模块,处理模块获取场景图像并 发送至识别模块,识别模块识别场景图像上目标车辆的轮廓和像素位置发送至处理模块,处 理模块根据轮廓判断目标车辆的车辆类型,处理模块形成测试结果时根据车辆类型、像素位 置和测试车辆的实时速度给每次测试结果添加标识,标识可以用数字或字母进行表示,处理 模块在测试的每个项目完成后将添加标识的测试结果发送至评分模块,项目包括目标车辆超 越测试、目标两轮车识别测试和目标车辆并道测试,评分模块根据标识计算平均值得到测试 评分并发送至存储模块进行暂时存储,处理模块以项目测试的预设数量和实际测试数量相等 来判断全部项目完成测试,处理模块在测试的全部项目完成后向评分模块发送操作信号,评 分模块根据操作信号将已暂时存储的测试评分乘以预设权重值得到评价结果。
[0066]
商用车盲区监视系统的评价方法,步骤四中,通过处理模块获取拍摄模块拍摄盲区所在 侧目标车辆场景图像发送至识别模块,让识别模块识别场景图像上目标车辆的轮廓和像素位 置发送至处理模块,由处理模块根据轮廓判断目标车辆的车辆类型,并在形成测试结果时根 据车辆类型、像素位置和测试车辆的实时速度给每次测试结果添加标识,让处理模块在测试 的每个项目完成后将添加标识的测试结果发送至评分模块,由评分模块根据标识计算平均值 得到测试评分并发送至存储模块进行暂时存储,通过处理模块在测试的全部项目完成后向评 分模块发送操作信号,让评分模块根据操作信号将已暂时存储的测试评分乘以预设权重值得 到评价结果。
[0067]
通过对场景图像进行拍摄识别,然后自动区别对应的测试项目,根据相应的信息进行标 识添加,再由评分模块在每个项目完成后就进行评分存储,当所有项目完成后,再进行预设 权重的评价评分,将同一商用车的多个测试结合起来评价,提高评价的完整性和准确性。
[0068]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描 述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若 干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专 利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的
具体实施方 式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。