激光雷达及其探测装置
1.本技术是申请日为2019年8月30日的pct中国国家阶段申请201980085840.3(对 应的pct申请号为pct/cn2019/103853)的分案申请,其全部内容整体引为参考。
技术领域
2.本技术涉及测距领域,特别涉及一种激光雷达。
背景技术:
3.激光雷达lidar是激光主动探测传感器设备的一种统称,其工作原理大致如下: 激光雷达的发射器发射出激光光束,激光光束遇到物体后,经过漫反射,返回至激光 接收器,雷达模块根据发送和接收激光光束的时间间隔乘以光速,再除以2,即可计算 出发射器与物体的距离。
4.现有的激光雷达,在主轴轴系的结构上,主要采用贯穿轴的结构设计,而所谓的 贯穿轴,即是指从激光雷达的顶部一直延伸至底部的主轴的结构,而从底部到顶部的 主轴占据了激光雷达内部的空间,给位于激光雷达上方的测距组件或者说雷达转子的 设计提高了难度。并且,这种贯穿轴设计的成本较高,机械结构复杂,轴系设计不紧 密。
5.另外,目前的多线激光雷达为一对一的收发通道,例如,32线雷达需要32对发射 光源与接收通道。并且,旋转扫描式激光雷达有着向纵向(垂直)视场越来越大,扫 描线束越来越多的趋势不断发展。而该发展趋势,则要求激光雷达的通道数量越来越 多。越来越多的通道数量可能会使激光雷达的成本变高,内部空间紧张,体积增大, 并使发射端空间排布的难度增高。
6.现有的激光雷达,在主轴轴系的结构上,主要采用贯穿轴的结构设计,主轴从激 光雷达的顶部一直延伸至底部,如此,在设计探测装置时,需要使用发射镜来折转光 路以避开主轴,探测装置的结构设计比较复杂。并且,多线激光雷达为一对一的收发 通道,即每个发射光源均有一个光电传感元件与之相对应,在使用时,每对发射光源 和光电传感元件都需要人为进行对准光路装调,这将可能提高使用激光雷达的难度, 并降低使用效率。
7.另外,早期的激光雷达是单线激光雷达,也就是只有一个激光器和探测器,其 扫描的目标范围有限,容易造成检测目标的缺失。为了弥补单线激光雷达的缺点, 多线激光雷达越来越成为研究和商用的焦点。现有多线激光雷达往往存在成本高 昂、能耗过大的问题。
8.背景技术部分的内容仅仅是公开人所知晓的技术,并不当然代表本领域的现有技 术。
9.公开内容
10.本技术的目的在于提供一种激光雷达,可减小因主轴从上到下贯穿整个雷达所占 用的空间,方便并简化了主轴上方雷达转子上的各器件的结构的设置。
11.为解决上述技术问题,本技术的实施例公开了一种激光雷达,包括主轴、雷达转 子、上仓板、顶盖和底座;
12.所述上仓板相对于所述雷达转子固定设置,且所述上仓板在所述激光雷达的轴向 上相对更靠近所述底座,更远离所述顶盖;
13.所述主轴垂直于所述底座设置并且位于所述上仓板和所述底座之间。
14.可选地,该激光雷达还包括旋转支架及驱动电机;
15.所述旋转支架包括第一部分及第二部分,所述第一部分为中空结构且适于套设于 所述主轴上,所述第二部分为垂直于所述第一部分的圆盘面结构且适于与所述雷达转 子耦接,所述第二部分包括至少三个旋转子支架,每个所述旋转子支架的第一端耦接 于所述第一部分,每个所述旋转子支架的第二端耦接于所述第二部分的圆盘面的边缘, 所述驱动电机适于通过所述旋转支架驱动所述雷达转子旋转。
16.可选地,每个所述旋转子支架的第二端与所述圆盘面的边缘的耦接处还设置有支 撑凸缘,所述支撑凸缘的凸起方向背离所述底座,所述雷达转子适于通过所述支撑凸 缘与所述旋转支架耦接。
17.可选地,激光雷达还包括下仓板,所述下仓板位于所述上仓板和所述底座之间并 环绕所述主轴设置。
18.可选地,激光雷达还包括位于所述上仓板和下仓板之间的无线供电组件,所述无 线供电组件包括无线发射线圈、无线接收线圈、发射电路板和接收电路板;
19.所述无线发射线圈、无线接收线圈、发射电路板和接收电路板均环绕所述主轴设 置;
20.所述无线发射线圈和发射电路板相对于所述主轴固定设置,所述无线接收线圈和 接收电路板相对于所述雷达转子固定设置;
21.所述无线发射线圈与所述发射电路板电连接,所述无线接收线圈与所述发射电路 板电连接。
22.可选地,所述激光雷达还包括驱动电机,所述驱动电机包括磁铁和电枢,所述磁 铁及电枢均环绕所述主轴设置,且所述磁铁相对所述电枢更远离所述主轴,所述磁铁 与所述发射电路板耦接。
23.可选地,所述激光雷达还包括驱动电机,所述驱动电机包括磁铁和电枢,所述磁 铁及电枢均环绕所述主轴设置,且所述磁铁相对所述电枢更远离所述主轴,所述发射 电路板与所述电枢电连接以向所述电枢供电。
24.可选地,所述驱动电机为直流电机。
25.可选地,激光雷达还包括角度测量组件,所述角度测量组件环绕所述主轴设置, 并且相对于所述无线供电组件与所述主轴的距离更远。
26.可选地,激光雷达还包括电缆接口,所述电缆接口用于连接所述激光雷达与相对 于所述激光雷达外的外部设备。
27.本技术实施例包括,但不限于,如下效果:
28.1)采用非贯穿主轴结构,通过将上下仓板、发射和接收电路板、主轴等元器件压 缩叠加设置于激光雷达的偏下方位置形成扁平化平台,减小了因主轴从上到下贯穿整 个雷达所占用的空间,方便并简化了设置于主轴上方或者下方的测距组件等的结构的 设置。
29.2)旋转支架上的支撑凸缘提高了主轴上方雷达转子部分转动的稳定性,减少了转 动对整机寿命和雷达成像质量的影响。
30.3)由于中空的下仓板套设于主轴上,也即主轴贯穿下仓板,则主轴可以为旋转支 架提供更好的支撑性,且可以提高雷达的稳定性。
31.4)现有的激光雷达多采用较为复杂的盘式电机驱动雷达转子,而本技术采用直流 电机驱动雷达转子,直流电机具有结构简单低成本的特点,因此可以降低激光雷达的 成本及复杂度。
32.5)将如码盘的角度测量组件设置在最外侧靠近激光雷达的外壳,能提高测量角度 的准确性,从而提高激光雷达的测量准确度。
33.6)驱动电机采用磁铁作为转子,电枢作为定子,磁铁无需供电,而电枢与发射电 路板电连接,通过下仓板为电枢供电,降低了无线供电组件的供电压力。
34.本技术的目的还在于提供一种激光雷达及其探测装置,激光雷达中的发射支撑体 和接收支撑体的延伸方向相互平行,也即基本相对对称地设置,且光路上各元件位置 相对固定,结构简单,因此可以减少或者避免对准光路装调。
35.为解决上述技术问题,本技术的一方面公开了一种激光雷达的探测装置,包括镜 筒、光束发射器件、发射透镜组件、接收透镜组件、以及光电处理器件;
36.所述镜筒包括发射支撑体和接收支撑体,所述发射支撑体和接收支撑体的延伸方 向相互平行;
37.所述发射透镜组件位于所述发射支撑体内部,并位于所述光束发射器件发出的探 测光束的光路径上;所述接收透镜组件位于所述接收支撑体内部,并位于所述光电处 理器件接收的回波光束的光路径上。
38.可以理解,发射支撑体和接收支撑体可以是一体的,即是通过将一个镜筒由隔光 板隔开得到的两个支撑体,也可以是独立的两个支撑体,支撑体的侧壁为隔光材料。
39.通过将发射和接收透镜组件设置在延伸方向相互平行的镜筒中,能够使得探测光 束的出射方向和回波光束的入射方向近似平行,无需对光束进行转折,各光学器件的 结构设置相对简单,减少或者避免了对准光路装调。
40.在本技术的另一方面,所述光束发射器件包括发射电路板,所述发射电路板位于 所述发射支撑体的外部并设置于所述发射支撑体的后端,其中,所述发射支撑体的后 端为与所述发射支撑体出射所述探测光束的一端相对的另一端;所述光电处理器件包 括接收电路板,所述接收电路板位于所述接收支撑体的外部并设置于所述接收支撑体 的后端,其中,所述接收支撑体的后端为与所述接收支撑体接收所述回波光束的一端 相对的另一端。发射隔磁件设置于所述发射电路板的后端,用于屏蔽所述发射电路板 发出的电磁信号;接收隔磁件设置于所述接收电路板的后端,用于屏蔽所述接收电路 板发出的电磁信号。发射隔磁件和接收隔磁件可以是两个分开的部件,也可以是一体 的,在此不做限制,其能够阻隔发射电路板和接收电路板之间的电磁串扰,减少电路 的噪音。
41.在本技术的另一方面,所述发射支撑体的前端端面上具有发射孔,并且探测光束 适于经由所述发射孔从所述发射支撑体射出;所述接收支撑体的前端端面上具有接收 孔,并且所述回波光束适于经由所述接收孔入射至所述接收支撑体;并且所述镜筒还 包括发射遮光板和接收遮光板,所述发射遮光板位于所述发射支撑体前端的端面的外 侧并与所述发射支撑体前端的端面垂直,所述接收遮光板位于所述接收支撑体前端的 端面的外侧并与所述接收支撑体前端的端面垂直。发射遮光板和接收遮光板能够分别 对发射孔发出
的探测光束和接收孔接收的回波光束起到隔离作用,尽量避免发射孔发 出的探测光束和接收孔接收的回波光束相互干扰,减少点云图中的噪声点。
42.本技术的另一方面公开了一种激光雷达,该激光雷达包括探测装置、主轴、上仓 板、顶盖、以及底座;
43.所述上仓板相对于所述探测装置固定设置并位于所述探测装置的支撑平台的下 方,且所述上仓板在所述探测装置的轴向上相对更靠近所述底座,更远离所述顶盖;
44.所述主轴垂直于所述底座设置,并且位于所述上仓板和所述底座之间;
45.所述探测装置能够绕所述主轴360
°
旋转,以实现在水平方向上的扫描。
46.该激光雷达采用非贯穿主轴结构,通过将上下仓板、发射和接收电路板、主轴等 元器件压缩叠加设置于激光雷达的偏下方位置形成扁平化平台,减小了因主轴从上到 下贯穿整个激光雷达所占用的空间,故本技术各方面公开的探测装置可以安装于扁平 化平台之上,方便使用,这种设计有利于探测装置和扁平化平台中的器件的独立维护 和独立升级。
47.附图说明
48.构成本公开的一部分的附图用来提供对本公开的进一步理解,本公开的示意性实 施例及其说明用于解释本公开,并不构成对本公开的不当限定。在附图中:
49.图1根据本技术的一些实施例,示出了激光雷达的剖面示意图;
50.图2根据本技术的一些实施例,示出了激光雷达的扁平化平台的结构示意图;
51.图3根据本技术的一些实施例,示出了激光雷达扁平化平台的剖面示意图;图3a 根据本技术的一些实施例,示出了码盘的示意图;图3b示出了上行通信和下行通信的 示意图;
52.图4根据本技术的一些实施例,示出了旋转支架的结构示意图;
53.图5根据本技术的一些实施例,示出了主轴的结构示意图。
54.图6根据本技术的一些实施例,示出了激光雷达的探测装置的结构示意图;
55.图7根据本技术的一些实施例,示出了探测装置的分解图;
56.图7a根据本技术的一些实施例,示出了发射支撑体的剖面图;
57.图7b根据本技术的一些实施例,示出了接收支撑体的剖面图;
58.图8根据本技术的一些实施例,示出了光束发射器件和光电处理器件的示意图。
59.图9根据本技术的一些实施例,示出了激光雷达扁平化平台的剖面示意图;
60.图10根据本技术的一些实施例,示出了激光雷达的剖面示意图;
61.图11根据本技术的一些实施例,示出了主轴中的通信组件的结构示意图;
62.图12示出了根据本技术第三方面的激光雷达的探测装置的分解图;
63.图12a示出了发射透镜组件、接收透镜组件、光束发射器件、光束接收器件的分 解示意图;
64.图13示意性示出了发射透镜组件和接收透镜组件的示意图;
65.图14a示出了发射透镜组件设置在发射支撑体内部的凹槽中的示意图;
66.图14b示出了接收透镜组件设置在接收支撑体的的凹槽中的示意图;
67.图15示出了激光雷达进行探测的光路示意图;
68.图16示出了发射光路中从一个组的发射光源出射的光束经过发射透镜组件后的光 路变化;
69.图17示意性示出了四组发射光源形成的视场;
70.图18示出了四组发射光源形成的视场的扫描线分布;
71.图19示出了根据本技术的一个实施例的激光雷达的探测装置;
72.图20为现有技术中用于激光雷达的信号发射器的驱动电路的原理性示意图;
73.图21为本技术实施例提供的激光雷达的发射电路的一种结构示意图;
74.图22为本技术实施例提供的激光雷达的发射电路的另一种结构示意图;
75.图23为本技术实施例提供的激光雷达的发射电路的又一种结构示意图;
76.图24为本技术实施例提供的激光雷达的一种结构示意图;
77.图25为本技术实施例提供的基于激光雷达的测距方法的一个流程示意图。
78.图26为现有技术中用于激光雷达的信号接收器的一个原理性结构示意图;
79.图27为本技术实施例提供的激光雷达的接收电路的一种结构示意图;
80.图28为本技术实施例提供的激光雷达的接收电路的另一种结构示意图;
81.图29为本技术实施例提供的激光雷达的测距方法的一个流程示意图。
具体实施方式
82.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的 那样,在不脱离本公开的精神或范围的情况下,可通过各种不同方式修改所描述的实 施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
83.在本公开的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽 度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"坚直"、"水平"、"顶"、"底"、 "内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或 位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元 件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。 此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或 者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示 或者隐含地包括一个或者更多个所述特征。在本公开的描述中,"多个"的含义是两个 或两个以上,除非另有明确具体的限定。
84.在本公开的描述中,需要说明的是,除非另有明确的规定和限定,术语"安装"、" 相连"、"连接"应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体 地连接:可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以 通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对 于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本公开中的具体含 义。
85.在本公开中,除非另有明确的规定和限定,第一特征在第二特征之"上"或之"下", 可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通 过它们之间的另外的特征接触。而且,第一特征在第二特征"之上"、"上方"和"上面" 包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特 征。第一特
征在第二特征"之下"、"下方"和"下面"包括第一特征在第二特征正上方和 斜上方,或仅仅表示第一特征水平高度小于第二特征。
86.下文的公开提供了许多不同的实施方式或例子用来实现本公开的不同结构。为了 简化本公开的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示 例,并且目的不在于限制本公开。此外,本公开可以在不同例子中重复参考数字和/或 参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/ 或设置之间的关系。此外,本公开提供了的各种特定的工艺和材料的例子,但是本领 域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
87.以下结合附图对本公开的优选实施例进行说明,应当理解,此处所描述的优选实 施例仅用于说明和解释本公开,并不用于限定本公开。
88.本技术的说明性实施例包括但不限于一种激光雷达。
89.本技术将使用本领域技术人员通常采用的术语来描述说明性实施例的各个方面, 以将他们工作的实质传达给本领域其他技术人员。然而,对于本领域技术人员显而易 见的是,可以使用所描述方面的部分来实践一些可替代实施例。出于解释的目的,为 提供对说明性实施例的透彻理解,对具体的数字、材料和配置进行阐述。然而,对于 本领域技术人员来说显而易见的是,可以在没有具体细节的情况下实现替代的实施例。 在其他情况下,为了不对说明性实施例造成混淆,省略或简化了一些公知的特征。
90.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术的实施 例作进一步地详细描述。
91.第一方面
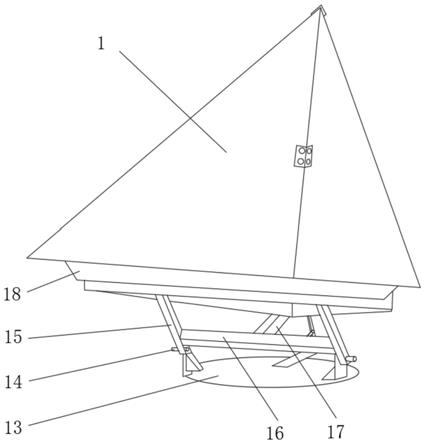
92.根据本技术第一方面的一些实施例,公开了一种激光雷达。图1是该激光雷达的 剖面结构示意图,图2和图3分别示出了该激光雷达的扁平化平台的结构示意图和剖 面示意图。如图1所示,该激光雷达的主轴2位于整个雷达的下半部分,并非是轴向 贯穿整个激光雷达,从而减小了因主轴从上到下贯穿整个雷达所占用的空间,方便并 简化了主轴上方测距组件等的结构的设置。
93.具体地,参考图1、图2及图3,该激光雷达可以包括底座1、主轴2、外壳16、 雷达转子(探测装置)17、旋转支架3、顶盖15、上仓板7、下仓板8、轴承6、无线 供电组件、直流电机、通信组件(未示出)、码盘13以及电缆接口14。主轴2位于上 仓板7和底座1组成的空间之中并与底座1相垂直。从图4和图5分别示出的旋转支 架3和主轴2的具体结构可以看出,主轴2在穿透下仓板8后,下端部2b固定在主轴 座1a上,故可以提高激光雷达的稳定性。另外,主轴2的上端部2a可以套设于旋转 支架3的中空的第一部分3a。此外,可以理解,在本发明的其他实施例中,也可以不 设置主轴1穿过下仓板8,而是位于下仓板8之上,也即将下仓板8设置于主轴座1a 的下端的下方。
94.如图4所示,旋转支架3的第一部分3a垂直于圆盘面结构的第二部分3b,第一部 分3a套设于主轴2上。第二部分3b与雷达转子17耦接,并且,在一示范例中,第二 部分3b包括三个旋转子支架3c,每个旋转子支架3c的第一端耦接于第一部分3a,每 个旋转子支架3c的第二端耦接于第二部分3b的圆盘面的边缘。每个旋转子支架3c的 第二端与圆盘面的边缘的耦接处还设置有支撑凸缘3d,支撑凸缘3d的凸起方向背离底 座1,雷达转子17可以通过支撑凸缘3d上的通孔与旋转支架3耦接,从而提高主轴2 上方雷达转子17部分转动的稳定
性,减少转动对整机寿命和雷达成像质量的影响。可 以理解,旋转子支架的数量可以不仅仅是三个,也可以是大于三的任何数目,并且, 支撑凸缘的个数也可以是大于三的任何数目。此外,旋转支架也可以采用其他的适合 套于主轴上并承接雷达转子的结构,在此不做限制。
95.上仓板7设置在激光雷达轴向上更靠近底座的部分,并位于旋转支架3的圆盘面 上方,并且上仓板7相对于雷达转子17固定设置,即上仓板7可随旋转支架3旋转, 主要用于对从雷达转子17上各器件输出以及传输给雷达转子17上的各器件的各种信 号进行处理。可以理解,上仓板7也可以具有其他功能,也可以有其他的名称,并不 限于此。下仓板8主要用于对从雷达转子17上各器件接收到的以及要发送给雷达转子 17上的各器件的各种信号进行处理。可以理解,下仓板8也可以具有其他功能或者具 备其他名称,并不限于此。需要说明的是,由于雷达转子17的内部具体结构对本实施 例要体现的方案的实施无关,只要雷达转子17可以转动并可以完成距离检测即可,故 雷达转子17的内部结构并未示出。
96.在具体实施中,通信组件可以包括第一通信模块和第二通信模块,第一通信模块 相对于雷达转子17固定设置并与上仓板7电连接,第二通信模块相对于主轴2固定设 置并与下仓板8电连接。
97.在本发明一实施例中,无线供电组件可以位于上仓板7和下仓板8之间,具体可 以包括无线发射线圈12、无线接收线圈11、发射电路板10和接收电路板9,无线发射 线圈12、无线接收线圈11、发射电路板10和接收电路板9均环绕主轴2设置,无线 发射线圈12和发射电路板10相对于主轴2固定设置,无线接收线圈11和接收电路板 9相对于雷达转子17固定设置,无线发射线圈12与无线接收线圈11相对运动,并用 于向驱动电机及雷达转子17上的各器件供电,如设置于雷达转子17内并相对于雷达 转子17固定设置的测距组件。
98.驱动电机环绕主轴2设置,并通过带动旋转支架3旋转而带动旋转支架3上套有 的雷达转子17相对于主轴2或者底座1旋转。此处驱动电机可以采用直流电机,而该 直流电机包括磁铁5和电枢4,且都环绕主轴2设置的磁铁5和电枢4在作为定转子的 功能角色上可以互换。比如可以设置磁铁5为转子,电枢4为定子。磁铁5套在电枢4 的外侧,相对与主轴2的距离更远,由于磁铁5无需供电,下仓板8与电枢4电连接 以有线连接形式向所述电枢4供电,故可以降低无线供电组件的供电压力。可以理解, 在本发明其他实施例中,直流电机的磁铁5和电枢4也可以采用另外的功能角色设置, 例如,磁铁5作为电机定子与发射电路板10耦接,电枢4作为电机转子,可以通过无 线供电组件供电。此外,本技术中的驱动电机也可以采用其他类型的驱动电机,不限 定为直流电机。现有的激光雷达多采用盘式电机,盘式电机的结构复杂,而本技术的 激光雷达采用直流电机,直流电机具有结构简单低成本的特点,故可以降低激光雷达 的复杂度。
99.在具体实施中,可以采用码盘13作为角度测量组件,码盘13环绕主轴2设置, 并且相对于无线供电组件与主轴2的距离更远,即将码盘13设置在周向上距离主轴2 最远处,靠近底座1的外壳的周壁。通过将码盘13设置在最外侧,或者说靠近外壳16 的位置,能提高码盘测量角度的准确性。
100.图3a示出了根据本发明一个实施例的码盘13。如图3a所示,码盘13大致为圆环 形状,可环绕主轴2设置。码盘13上例如具有规则分布的多个空隙或者编码标志,供 光电元件测量使用。码盘13例如可随着上仓板7和雷达转子17同步旋转,在其旋转 过程中,光电部件
(未示出)例如可通过码盘13上的空隙或者编码标志,来识别或确 定雷达转子17的旋转角度,对雷达转子17进行角度定向,从而确定激光雷达在水平 方向上扫描的角度。
101.另外,电缆接口14用于将激光雷达与其他的电子器件,比如其他的激光雷达或者 电子设备进行连接,从而可以将当前激光雷达内部的信号传输到当前激光雷达的外部, 而电缆接口14可以防水,能防止激光雷达进水时对信号传输的影响,从而可以提高雷 达的防水能力。上述激光雷达的工作过程如下:
102.第二通信模块将下仓板8发出的测距指令信息发送给第一通信模块,例如,以光 信号的形式发送,即所谓的上行光信号传输或上行通信,第一通信模块通过上仓板7 将该测距指令信息发送给设置于雷达转子17内部的测距组件,测距组件接收到测距指 令信息后开始进行测距任务;
103.测距组件执行测距任务产生的测距结果信息经由上仓板7处理后通过第一通信模 块发送给第二通信模块,例如,以光信号的形式发送,即所谓的下行光信号传输或下 行通信,下仓板通过第二通信模块控制组件接收到测距结果信息后对其进行相关分析 和处理。
104.根据本发明的一个优选实施例,为了避免上下行通信之间的串扰,上行通信和下 行通信采用不同的波长来进行通信。相对于上行通信,下行通信的传输数据量更大, 速度也会更快。根据一个实例,下行通信可采用904nm左右的激光器作为光通信发射 单元,上行通信采用led红光作为光通信发射单元。图3b示出了上行通信和下行通信 的示意图,其中,箭头向下表示下行通信;箭头向上表示上行通信。如图3b所示,对 于下行通信,上仓板7上设置有第一光通信发射单元l1,例如波长为904nm左右的激 光器,在下仓板8上设置有第一光通信接收单元r1,其能够接收或处理的光信号的波 长与第一光通信发射单元l1相对应;对于上行通信,在下仓板8上设置有第二光通信 发射单元l2,例如红光led,在上仓板7上设置有第二光通信接收单元r2,其能够接 收或处理的光信号的波长与第二光通信发射单元l2相对应。因此,第一通信模块包括 第一光通信发射单元l1和第二光通信接收单元r2,第二通信模块包括第二光通信发射 单元l2和第一光通信接收单元r1。另外如图3b所示,根据本发明的一个优选实施例, 所述第一通信模块和第二通信模块均设置在所述主轴2内部,以节省空间。
105.由于上下行通信模块的光通信发射单元发出的光的发散角较大,因此基本上收发 一对一即可,也即第一通信模块和第二通信模块可以各自包括一个光通信发射单元与 一个光通信接收单元,故通信部件的结构相对简单。上下通信所采用的波长不同,亦 可降低干扰,提高通信的效率。另外,从位置上而言的话,上下行通信的模块都设置 在轴心位置,具体地,无论是在上仓板还是在下仓板上,所述第一通信模块和第二通 信模块均设置于相对靠近主轴2的周向截面的中心的位置。通信器件本身体积不大, 周向截面的中心位置处足以放置,因此能够有效地利用空间。
106.此外,在上述激光雷达工作的过程中,无线发射线圈12与无线接收线圈11相对 转动,无线供电组件可以向设置于雷达转子17内的测距组件供电,以使得测距组件执 行测距任务。同时,对于测量角度的码盘13,在激光雷达的工作过程中,对雷达的旋 转角度(也即雷达的水平扫描角度)进行测量。
107.在以下实施例中总结了进一步的本技术的技术方案:
108.实施例1:一种激光雷达,包括主轴、雷达转子、上仓板、顶盖和底座;
109.所述上仓板相对于所述雷达转子固定设置,且所述上仓板在所述激光雷达的轴向 上相对更靠近所述底座,更远离所述顶盖;
110.所述主轴垂直于所述底座设置,并且位于所述上仓板和所述底座之间。
111.实施例2:根据实施例1所述的激光雷达,还包括旋转支架及驱动电机;
112.所述旋转支架包括第一部分及第二部分,所述第一部分为中空结构且适于套设于 所述主轴上,所述第二部分为垂直于所述第一部分的圆盘面结构且适于与所述雷达转 子耦接,所述第二部分包括至少三个旋转子支架,每个所述旋转子支架的第一端耦接 于所述第一部分,每个所述旋转子支架的第二端耦接于所述第二部分的圆盘面的边缘, 所述驱动电机适于通过所述旋转支架驱动所述雷达转子旋转。
113.实施例3:根据实施例2所述的激光雷达,每个所述旋转子支架的第二端与所述圆 盘面的边缘的耦接处还设置有支撑凸缘,所述支撑凸缘的凸起方向背离所述底座,所 述雷达转子适于通过所述支撑凸缘与所述旋转支架耦接。
114.实施例4:根据实施例1或2所述的激光雷达,还包括下仓板,所述下仓板位于所 述上仓板和所述底座之间并环绕所述主轴设置。
115.实施例5:根据实施例4所述的激光雷达,还包括位于所述上仓板和下仓板之间的 无线供电组件,所述无线供电组件包括无线发射线圈、无线接收线圈、发射电路板和 接收电路板;
116.所述无线发射线圈、无线接收线圈、发射电路板和接收电路板均环绕所述主轴设 置;
117.所述无线发射线圈和发射电路板相对于所述主轴固定设置,所述无线接收线圈和 接收电路板相对于所述雷达转子固定设置;
118.所述无线发射线圈与所述发射电路板电连接,所述无线接收线圈与所述接收电路 板电连接。
119.实施例6:根据实施例2至5中任一项所述的激光雷达,还包括驱动电机,所述驱 动电机包括磁铁和电枢,所述磁铁及电枢均环绕所述主轴设置,且所述磁铁相对所述 电枢更远离所述主轴,所述磁铁与所述发射电路板耦接。
120.实施例7:根据实施例2至5中任一项所述的激光雷达,所述激光雷达还包括驱动 电机,所述驱动电机包括磁铁和电枢,所述磁铁及电枢均环绕所述主轴设置,且所述 磁铁相对所述电枢更远离所述主轴,所述发射电路板与所述电枢电连接以向所述电枢 供电。
121.实施例8:根据实施例2至7中任一项所述的激光雷达,所述驱动电机为直流电机。
122.实施例9:根据实施例5至8中任一项所述的激光雷达,还包括角度测量组件,所 述角度测量组件环绕所述主轴设置,并且相对于所述无线供电组件与所述主轴的距离 更远。
123.实施例10:根据实施例1至9中任一项所述的激光雷达,还包括电缆接口,所述 电缆接口用于连接所述激光雷达与相对于所述激光雷达外的外部设备。
124.第二方面
125.本技术第二方面的说明性实施例包括但不限于一种激光雷达的探测装置及其激光 雷达。
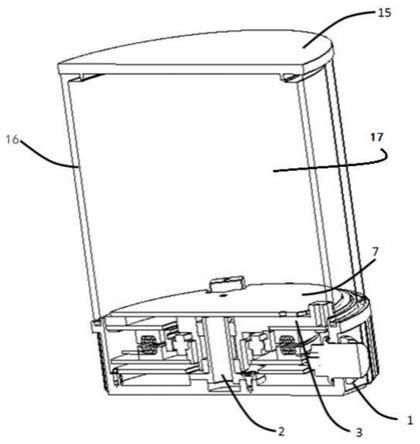
126.根据本技术的一些实施例,公开了一种激光雷达。该激光雷达的剖面结构如图1 所示,图6和图7示出了该激光雷达的探测装置的结构示意图和分解图,图2示出了 该激光
雷达的扁平化平台的结构示意图,图9示出了该激光雷达的扁平化平台的剖面 示意图。如图1所示,该激光雷达的主轴2位于整个雷达的下半部分,并非是轴向贯 穿整个激光雷达,从而减小了因主轴从上到下贯穿整个雷达所占用的空间,方便并简 化了主轴上方探测装置的结构的设置。
127.具体地,参考图1、图6、图7、图2、图9及图10,该激光雷达可以包括底座1、 主轴2、旋转支架3、支撑平台18、探测装置(雷达转子)17、顶盖15、外壳16、上 仓板7、下仓板8、轴承6、无线供电组件(11及12)、直流电机、通信组件19、码盘13以及电缆接口14。
128.主轴2贯穿于上仓板7和底座1之间并与底座1相垂直。主轴2为中空结构,通 信组件19设置在主轴2中。探测装置17位于上仓板7、顶盖15以及外壳16组成的空 间中。在直流电机的驱动下,在本发明一个实施例中,上仓板7、探测装置17以及外 壳16可以一起绕着主轴2进行360度旋转,以实现激光雷达在水平方向上的扫描。
129.在本发明另一实施例中,在直流电机的驱动下,上仓板7与探测装置17也可以在 外壳16内部旋转,以实现激光雷达在水平方向上的扫描。可以理解,在本技术中,水 平方向是指与主轴2相垂直的方向。
130.如图6和图7所示,探测装置17包括:位于上仓板7上方的支撑平台18,以及位 于支撑平台18上方并相对于支撑平台18固定设置的镜筒、光束发射器件703、发射透 镜组件、接收透镜组件、光电处理器件704、隔光板711、发射隔磁件705及接收隔磁 件706。镜筒包括由隔光板711隔开的发射支撑体701和接收支撑体702,其中发射支 撑体701和接收支撑体702的延伸方向相互平行,且发射支撑体701和接收支撑体702 相对于隔光板711对称设置。
131.在具体实施中,发射支撑体701和接收支撑体702也可以为一体式结构,只要可 以用以安装固定发射透镜组件及接收透镜组件即可。可以理解的是,顶盖15以及外壳 16可以为分体设置,也可以为一体式设置,并且为了便于发射光束的出射以及回波光 束的接收,上述外壳16至少有一部分透明。
132.在具体实施中,参考图7及图7b,发射支撑体701的前端的端面上具有发射孔707 和发射遮光板709,发射支撑体701的顶部设置有阶梯状的结构713,该阶梯状的结构 713可以用以减轻发射支撑体701的重量。并且,发射支撑体701的内壁上具有凹槽 712,所述凹槽712用以安装发射透镜组件,详细来说,发射透镜组件可以包括准直器、 汇聚透镜等光学器件。结合参考图8,发射支撑体701的后端的外部设置有光束发射器 件703,光束发射器件703包括发射电路板703a和m
×
n个发射光源703b。m
×
n个发 射光源703b沿竖直方向交错地设置在发射电路板703a上,如图8所示,例如,4
×
16 个发射光源703b,每16个发射光源703b在竖向上排列成一列。m n中至少一个为大 于1的自然数。在使用时,由多个发射光源703b发射的探测光束经由发射透镜组后, 通过发射孔707出射至待测空间,其中,发射遮光板709与发射支撑体701的前端端 面垂直,与发射孔707均位于隔光板711的一侧,能阻挡探测光束从发射孔707出射 经外壳16反射后进入接收孔708,避免对接收孔708接收到的回波光束造成干扰,减 少扫描得到的点云图中的噪声点。
133.类似地,参考图7以及图7a可见,接收支撑体702的前端端面上具有接收孔708 和接收遮光板710,接收支撑体702的顶部设置有阶梯状的结构714,该阶梯状的结构 714可以用以减轻接收支撑体702的重量。并且,接收支撑体702的内壁上具有凹槽 712*,所述凹槽712*安装接收透镜组件,详细来说,接收透镜组件可以包括汇聚透镜 等光学器件。接收支
撑体702的后端的外部设置有光电处理器件704,光电处理器件 704包括接收电路板704a和多个光电传感元件704b。i
×
j个光电传感元件704b设置 在接收电路板704a上,i和j中至少一个为大于1的自然数。例如,图8所示的接收 电路板上具有与m
×
n个发射光源703b对应的m
×
n个光电传感元件704b,即此时i=m, j=n。此外,可以理解,在其他实施例中,光电传感元件704b和发光光源703b之间也 可以不是一一对应的关系,例如,可以是一对多的关系,也可以是多对一的关系。
134.在使用时,回波光束经由接收孔708入射至接收支撑体702,经由接收透镜组件汇 聚后入射至接收电路板704a上的光电传感元件704b,其中,接收遮光板710位于接受 支撑体702前端的端面上并与该端面垂直,接收遮光板710与接收孔708均位于隔光 板711的一侧,能阻挡发射孔707出射的探测光束经外壳16反射后进入接收孔708, 避免对接收孔708接收的回波光束造成干扰,减少扫描得到的点云图中的噪声点。
135.可以理解,本技术的实施例中,接收透镜组件和发射透镜组件中的各个光学器件 在接收支撑体702和发射支撑体701内部的位置固定,并且接收电路板704a和发射电 路板703a的位置可以被精确确定(即位于接收支撑体702和发射支撑体701的后端), 从而可以一定程度减少整机的装调。
136.可以理解,在本技术的实施例中,光电传感元件704b与发射光源703b可以一一 对应设置,也可以数量不同,在此不做限制。此外,为了便于对齐光电传感元件704b 与发射光源703b,可以将光电传感元件704b和发射光源703b中的一者固定设置,另 一者设置为可调。此外,多个发射光源703b在工作时可以按顺序发射光束,也可以同 时发射光束。
137.如上所述,发射电路板703a和接收电路板704a的位置可以分别精确地确定在发 射支撑体701和接收支撑体702的后端,从而可以减少整机的装调。
138.发射隔磁件705设置于发射电路板703a一侧面上,该侧面与发射支撑体701的后 端相背,发射隔磁件705用于屏蔽发射电路板703a产生的电磁信号;接收隔磁件706 设置于接收电路板704a一侧面上,该侧面与接收支撑体702的后端相背,用于屏蔽接 收电路板704a产生的电磁信号。
139.下面结合图2、图4、图5、图9说明本技术的扁平化平台。如图所示,主轴2在 穿透下仓板8后,下端部2b固定在主轴座1a上,故可以提高激光雷达的稳定性。另 外,主轴2的上端部2a可以套设于旋转支架3的中空的第一部分3a。此外,可以理解, 在本发明的其他实施例中,也可以不设置主轴2穿过下仓板8,而是位于下仓板8之上, 也即将下仓板8设置于主轴座1a的下端。
140.如图4所示,旋转支架的第一部分3a垂直于圆盘面结构的第二部分3b,第一部分 3a套设于主轴2上。第二部分3b与外壳16耦接,并且,在一示范例中,第二部分3b 包括三个旋转子支架3c,每个旋转子支架3c的第一端耦接于第一部分3a,每个旋转 子支架3c的第二端耦接于第二部分3b的圆盘面的边缘。每个旋转子支架3c的第二端 与圆盘面的边缘的耦接处还设置有支撑凸缘3d,支撑凸缘3d的凸起方向背离底座1, 上仓板7可以通过支撑凸缘3d上的通孔与旋转支架3耦接,从而提高探测装置17部 分转动的稳定性,减少转动对整机寿命和雷达成像质量的影响。可以理解,旋转子支 架的数量可以不仅仅是三个,也可以是大于三的任何数目,并且,支撑凸缘的个数也 可以是大于三的任何数目。此外,旋转支架也可以采用其他的适合套于主轴上并承接 上仓板7的结构,在此不做限制。
141.上仓板7设置在激光雷达轴向上更靠近底座的部分,并位于旋转支架3的圆盘面 上方,并且上仓板7相对于旋转支架3固定设置,即上仓板7可随旋转支架3旋转, 主要用于对从探测装置17上各器件输出以及传输给探测装置17上的各器件的各种信 号进行处理。可以理解,上仓板7也可以具有其他功能,也可以有其他的名称,并不 限于此。下仓板8主要用于对从探测装置17上各器件接收到的以及要发送给探测装置17上的各器件的各种信号进行处理。可以理解,下仓板8也可以具有其他功能或者具 备其他名称,并不限于此。
142.在具体实施中,如图11所示,通信组件19可以包括组成第一通信模块的光发射 元件19a和光电传感元件19d、以及组成第二通信模块的光发射元件19c和光电传感元 件19b,第一通信模块的光发射元件19a和光电传感元件19d相对于旋转支架3固定设 置并与上仓板7电连接,第二通信模块的光发射元件19c和光电传感元件19b相对于 主轴2固定设置并与下仓板8电连接。光发射元件19a发射的光束的波长与光发射元 件19c发射的光束的波长不同,具体而言,光发射元件19c发射波长为λ1的光束, 光发射元件19c与光电传感元件19d可以采用波长为λ1的光束进行上行通信,也即 将下仓板8的一些指令信息传输至上仓板7;而光发射元件19a发射波长为λ2的光束, 光发射元件19a与光电传感元件19b可以采用波长为λ2的光束进行下行通信,也即 通过上仓板7将探测装置17探测到的一些信息传输至下仓板8。由于该激光雷达将主 轴2设置在探测装置的下方,扁平化平台中设置有较多的器件,将通信组件19设置为 中空的主轴2中,能够有效节省扁平化平台中的空间,方便平台中其他器件的安置。
143.可以理解,在实际应用中,可以设置与在图11中的光发射元件和光电传感元件数 量不同的通信组件,在此不作限制。例如,考虑到下行数据传输的量比上行数据传输 的量大,可以在第二通信模块中设置光发射元件的数量,多于在第一通信模块上设置 的光发射元件的数量。可以理解,光发射元件可以是能够发光的任何器件,包括但不 限于激光二极管、发光二极管、有机发光二极管、激光发射器等。光电传感元件是指 能够进行光电信息互转的任何传感器,包括但不限于有光电管、光电倍增管、光敏电 阻、光敏二极管、光敏三极管、光电池、雪崩二极管等。
144.在本发明一实施例中,无线供电组件可以位于上仓板7和下仓板8之间,具体可 以包括无线发射线圈12、无线接收线圈11、发射电路板10和接收电路板9,无线发射 线圈12、无线接收线圈11、发射电路板10和接收电路板9均环绕主轴2设置,无线 发射线圈12和发射电路板10相对于主轴2固定设置,无线接收线圈11和接收电路板 9相对于旋转支架3固定设置,无线发射线圈12与无线接收线圈11相对运动,并用于 向驱动电机及探测装置17供电。
145.驱动电机环绕主轴2设置,并通过带动旋转支架3旋转而带动旋转支架3上套有 的外壳16、探测装置17、以及上仓板7相对于主轴2或者底座1旋转。此处驱动电机 可以采用直流电机,而该直流电机包括磁铁5和电枢4,且都环绕主轴2设置。参考图 9,磁铁5环绕主轴2设置且与旋转支架3固定连接,电枢4也是环绕主轴2设置,电 枢4是通过将线圈缠绕于硅钢片所形成,故电枢4的截面是类似十字型,电枢4与磁 铁5之间存在一定的间隙。另外,电枢固定环41环绕主轴2设置,分别与电枢4以及 无线供电发射板10连接,用以将电枢4固定到无线供电发射板10上。磁铁5和电枢4 在作为定转子的功能角色上可以互换,比如可以设置磁铁5为转子,电枢4为定子。 磁铁5套在电枢4的外侧,相对与主轴2的距离更远,由于磁铁5无需供电,下仓板8 与电枢4电连接以有线连接形式向所述电枢4供电,故可以降低无线供
电组件的供电 压力。可以理解,在本发明其他实施例中,直流电机的磁铁5和电枢4也可以采用另 外的功能角色设置,例如,磁铁5作为电机定子与发射电路板10耦接,电枢4作为电 机转子,可以通过无线供电组件供电。此外,本技术中的驱动电机也可以采用其他类 型的驱动电机,不限定为直流电机。现有的的激光雷达多采用盘式电机,盘式电机的 结构复杂,而本技术的激光雷达采用直流电机,直流电机具有结构简单低成本的特点, 故可以降低激光雷达的复杂度。
146.在具体实施中,可以采用码盘13作为角度测量组件,码盘13环绕主轴2设置, 并且相对于无线供电组件与主轴2的距离更远,即将码盘13设置在距离主轴2最远处, 靠近底座1的外壳的周壁。通过将码盘设置在最外侧靠近外壳,能提高码盘测量角度 的准确性。码盘13如图3a所示,此处不再赘述。
147.另外,电缆接口14用于将激光雷达与其他的电子器件,比如其他的激光雷达或者 电子设备进行连接,从而可以将当前激光雷达内部的信号传输到当前激光雷达的外部, 而电缆接口14可以防水,能防止激光雷达进水时对信号传输的影响,从而可以提高雷 达的防水能力。
148.上述激光雷达的工作过程如下:
149.光发射元件19c将下仓板8发出的检测指令信息以光信号的形式发送给光电传感 元件19d,即所谓的上行光信号传输或上行通信,光电传感元件19d对检测指令信息进 行光电转换后,通过上仓板7将该检测指令信息发送给探测装置17,探测装置17接收 到检测指令信息后开始进行检测任务;具体地,发射电路板703a接收到检测指令信息 后控制多个发射光源703b发射探测光束至待测空间,接收电路板704a上的光电传感 元件704b接收到由接收孔708入射的回波光束后进行光电转换,生成检测结果信息。
150.检测结果信息经由上仓板7处理后通过光发射元件19a以光信号的形式发送给光 电传感元件19b,即所谓的下行光信号传输,光电传感元件19b将检测结果信息进行光 电转换后发送给下仓板,下仓板将接收到的检测结果信息发送给控制组件,以便控制 组件对检测结果信息进行相关分析和处理。
151.根据本发明的一个优选实施例,上行通信和下行通信采用不同的波长来进行通信。 相对于上行通信,下行通信的传输数据量更大,速度也会更快。根据一个实例,下行 通信可采用904nm左右的激光器作为光通信发射单元,上行通信采用led红光作为光 通信发射单元。上行通信和下行通信的具体结构与图3b所示的类似,此处不再赘述。
152.此外,在上述激光雷达工作的过程中,无线发射线圈12与无线接收线圈11相对 转动,无线供电组件可以向探测装置17供电,以使得探测装置17执行检测任务。同 时,对于测量角度的码盘10,在激光雷达的工作过程中,对雷达的旋转角度进行测量。
153.现有激光雷达的贯穿主轴设置要求发射和接收光路需要设置反射镜来避开主轴, 而本技术的非贯穿主轴结构在激光雷达的下方位置形成扁平化平台,不存在主轴带来 的光路遮挡问题,无需反射镜进行折转光路,即发射和接收光路可以实现基本的平行 设置。例如,对于上述4
×
16个发射光源703b和对应的4
×
16个光电传感元件704b, 能够取消两组反射镜,多线数激光雷达可以做到没有发射与接收各线束的一一对应的 复杂装调过程,从而减少光学装调或者没有光学装调。
154.在以下实施例中总结了进一步的本技术的技术方案:
155.实施例1可以包括一种激光雷达的探测装置,包括镜筒、光束发射器件、发射透 镜组件、接收透镜组件、以及光电处理器件;
156.所述镜筒包括发射支撑体和接收支撑体,所述发射支撑体和接收支撑体的延伸方 向相互平行;
157.所述发射透镜组件位于所述发射支撑体内部,并位于所述光束发射器件发出的探 测光束的光路径上;
158.所述接收透镜组件位于所述接收支撑体内部,并位于所述光电处理器件接收的回 波光束的光路径上。
159.实施例2可以包括实施例1所述的激光雷达的探测装置,该探测装置还包括隔光 板,所述隔光板设置于所述发射支撑体和接收支撑体之间,且平行于所述发射支撑体 和接收支撑体的所述延伸方向。
160.实施例3可以包括实施例1或2所述的激光雷达的探测装置,其中,所述光束发 射器件包括发射电路板,所述发射电路板位于所述发射支撑体的外部并设置于所述发 射支撑体的后端,其中,所述发射支撑体的后端为与所述发射支撑体出射所述探测光 束的一端相对的另一端;
161.所述光电处理器件包括接收电路板,所述接收电路板位于所述接收支撑体的外部 并设置于所述接收支撑体的后端,其中,所述接收支撑体的后端为与所述接收支撑体 接收所述回波光束的一端相对的另一端。
162.实施例4可以包括实施例1至3中任一项所述的激光雷达的探测装置,该探测装 置还包括:
163.发射隔磁件,设置于所述发射电路板的后端,用于屏蔽所述发射电路板产生的电 磁信号;和
164.接收隔磁件,设置于所述接收电路板的后端,用于屏蔽所述接收电路板产生的电 磁信号。
165.实施例5可以包括实施例1至4中任一项所述的激光雷达的探测装置,其中,所 述光束发射器件还包括发射光源,所述光电处理器件还包括光电传感元件,其中:
166.m
×
n个所述发射光源设置在所述发射电路板上;和
167.i
×
j个所述光电传感元件设置在所述接收电路板上;
168.其中,所述m、n、i、j为大于1的自然数。
169.实施例6可以包括实施例1至5中任一项所述的激光雷达的探测装置,其中,所 述发射支撑体的前端端面上具有发射孔,并且探测光束适于经由所述发射孔从所述发 射支撑体射出;所述接收支撑体的前端端面上具有接收孔,并且所述回波光束适于经 由所述接收孔入射至所述接收支撑体;并且
170.所述镜筒还包括发射遮光板和接收遮光板,所述发射遮光板位于所述发射支撑体 前端的端面的外侧并与所述发射支撑体前端的端面垂直,所述接收遮光板位于所述接 收支撑体前端的端面的外侧并与所述接收支撑体前端的端面垂直。
171.实施例7可以包括实施例1至6中任一项所述的激光雷达的探测装置,其中,所 述发射支撑体的内壁上设置有至少一个凹槽,用于固定所述发射透镜组件;并且
172.所述接收支撑体的内壁上设置有至少一个凹槽,用于固定所述接收透镜组件。
173.实施例8可以包括实施例1所述的激光雷达的探测装置,探测装置还包括支撑平 台,所述镜筒、光束发射器件、发射透镜组件、接收透镜组件、以及光电处理器件位 于所述支撑平台的上方并相对于所述支撑平台固定设置。
174.实施例9可以包括一种激光雷达,该激光雷达包括:如实施例8所述的探测装置、 主轴、上仓板、顶盖、以及底座;
175.所述上仓板相对于所述探测装置固定设置并位于所述探测装置的支撑平台的下 方,且所述上仓板在所述探测装置的轴向上相对更靠近所述底座,更远离所述顶盖;
176.所述主轴垂直于所述底座设置,并且位于所述上仓板和所述底座之间;
177.所述探测装置能够相对于所述主轴以水平方向360
°
旋转。
178.实施例10可以包括实施例9所述的激光雷达,该激光雷达还包括旋转支架及驱动 电机;
179.所述旋转支架包括第一部分及第二部分,所述第一部分为中空结构且适于套设于 所述主轴上,所述第二部分为垂直于所述第一部分的圆盘面结构且适于支撑所述支撑 平台,所述第二部分包括至少三个旋转子支架,每个所述旋转子支架的第一端耦接于 所述第一部分,每个所述旋转子支架的第二端耦接于所述第二部分的圆盘面的边缘, 所述驱动电机适于通过所述旋转支架驱动所述支撑平台旋转。
180.实施例11可以包括实施例9或10所述的激光雷达,还包括外壳,所述外壳位于 所述底座上方,并与所述探测装置的所述支撑平台的周边相接。
181.实施例12可以包括实施例10所述的激光雷达,该激光雷达还包括通信组件;
182.所述主轴被设置为中空结构,所述通信组件被设置于所述主轴的内部。
183.实施例13可以包括实施例12所述的激光雷达,其中,所述通信组件包括第一通 信模块和第二通信模块,所述第一通信模块与所述探测装置相对固定,所述第二通信 模块与所述底座相对固定;
184.所述第一通信模块包括至少一个光发射元件,所述第二通信模块包括至少一个光 电传感元件,所述第二通信模块的所述至少一个光电传感元件位于所述第一通信模块 的至少一个光发射元件发出的光束的光路径上。
185.实施例14可以包括实施例13所述的激光雷达,其中,所述第二通信模块还包括 至少一个光发射元件,所述第一通信模块还包括至少一个光电传感元件,所述第一通 信模块的所述至少一个光电传感元件位于所述第二通信模块的所述至少一个光发射元 件发出的光束的光路径上。
186.实施例15可以包括实施例14所述的激光雷达,其中,所述第一通信模块的所述 至少一个光发射元件所发射光束的波长与所述第二通信模块的至少一个光发射元件所 发射光束的波长不同。
187.第三方面
188.本技术第三方面的说明性实施例包括但不限于一种激光雷达的探测装置及其激光 雷达。本技术第三方面主要是基于上述第二方面,因此以下描述中,将重点描述与第 二方面不同之处,相同之处或类似之处将不再赘述。
189.图12示出了根据本技术第三方面的激光雷达的探测装置(雷达转子)17,其例如 设置在图1所示的壳体16内。图12与图7所示结构类似,另外的示出了发射透镜组 件715和
接收透镜组件716。下面分别详细描述。
190.如图12所示,发射支撑体701与接收支撑体702基本是对称的结构,二者设置在 支撑平台18上。支撑平台18例如大致是圆形的,因此,发射支撑体701与接收支撑 体702的结合处(例如隔光板711的位置)大致可位于所述支撑平台18的一条直径上, 从而尽可能地将探测装置17的重量平均分布在所述支撑平台18上,尽可能减少在高 速旋转中可能产生的不平衡。
191.如图12所示,发射透镜组件715例如包括多个透镜,设置在发射支撑体701内部 的凹槽712中(如图7b所示)。发射透镜组件715例如可以包括准直器、汇聚透镜等 光学器件。发射支撑体701的后端设置有光束发射器件703,在使用时,所述光束发射 器件703发射的探测光束经由发射透镜组715进行调制整形后,通过发射孔707出射 至待测空间。
192.如图12所示,接收透镜组件716例如可包括多个透镜,设置在接收支撑体702的 凹槽712*中(如图7a所示)。接收透镜组件716例如包括汇聚透镜等光学器件。在使 用时,回波光束经由接收孔708入射至接收支撑体702,经由接收透镜组件716汇聚后 入射至接收电路板704a上的光电传感元件704b。图12a示出了发射透镜组件715、接 收透镜组件716、光束发射器件703、光束接收器件704的分解示意图。
193.图13示意性示出了发射透镜组件715和接收透镜组件716的示意图。图14a示出 了发射透镜组件715设置在发射支撑体701内部的凹槽712中的示意图,图14b示出 了接收透镜组件716设置在接收支撑体702的的凹槽712*中的示意图。
194.参考图13、图14a及图14b所示,发射透镜组件715包括两个平凸透镜(优选相 同规格的平凸透镜,也即透镜715c与715d)、一个对称双凸透镜(也即透镜715b)以 及光阑(靠近发射孔707一侧,也即透镜715a);接收透镜组件716包括透镜716a、 透镜716b以及透镜716c,在远离接收孔708一侧上还包括滤光片(也即滤光片716d), 用于滤除杂散光。根据本技术的一个实施例,所述发射透镜组件715为远心透镜组, 其中透镜715d靠近所述光束发射器件703设置,可接收来自所述光束发射器件703的 激光束,进行偏折后,将光束入射到其他透镜组件例如为准直透镜,配置成对所述经 过偏折的激光束进行准直并出射。
195.另外,根据本发明的一个优选实施例,所述接收透镜组件716中最靠近光束接收 器件704的透镜716d,以及发射透镜组件715中最靠近光束发射器件703的透镜715d, 位于所述支撑平台的中部,二者大致位于同一平面上,而且二者的连线或者整体的重 心经过所述支撑平台18的圆心。通常,透镜716d以及透镜715d的尺寸和重量都比较 大,因此,将二者设置在支撑平台的中部,有利于减小在高速旋转时探测装置17的转 动惯量。
196.另外与图7类似,设置在发射支撑体701外端上的阶梯状结构713,以及设置在接 收支撑体702外端上的阶梯状结构714,可以减轻发射支撑体701和接收支撑体702的 重量,同时由于阶梯状结构位于外端处,也能够减小高速旋转时探测装置17的转动惯 量。
197.图8中示出了光束发射器件703上包括四组发射光源703b,每组16个发射光源 703b,例如在竖直方向上排成一列;光束接收器件704同样包括四组光电传感元件704b, 每组16个光电传感元件704b优选的在竖直方向排成一列。图15示出了激光雷达进行 探测的光路示意图,其中为了清楚起见,省略了发射透镜组件和接收透镜组件。
198.图15中,ob代表待探测的物体。如图15所示,从发射光源703b出射的一部分光 束,入射到待探测物体ob上之后(待探测物体ob上的正方形代表来自发射光源703b 的光束在
待探测物体ob上产生的光斑),产生漫反射,部分光束被反射回到光电传感 元件704b。比如出射的光束190at,入射到待探测物体ob上生成光斑a,产生漫反射 部分光束190ar被光电传感元件704b的其中一个接收单元接收。又比如,出射的光束 190bt,入射到待探测物体ob上生成光斑b,产生漫反射部分光束190br被光电传感元 件704b的另一接收单元接收。光电传感元件704b产生的信号经过放大、过滤等信号 处理,再进行进一步处理,便可获知待探测物体ob的距离、方位等参数。需要说明的 是,本技术中的发射接收单元彼此的数量对应关系可以有多种,比如可以一一对应, 也可一个发射单元对应多个接收单元,也可多个发射单元对应一个接收单元。另外, 基本相互对应的发射接收单元的位置相对关系一致,比如发射光束190at的发射单元 位于整个发射光源703b构成的列的相对靠底部的位置,接收光束190ar的接收单元基 本也位于整个光电传感元件704b构成的列的相对靠底部的位置。发射光束190bt的发 射单元位于整个发射光源703b构成的列的相对靠顶部的位置,接收光束190br的接收 单元基本也位于整个光电传感元件704b构成的列的相对靠顶部的位置。
199.图16示出了发射光路中,从一个组的发射光源703b出射的光束,经过发射透镜 组件后的光路变化。图17示意性示出了四组发射光源703b形成的视场。图17中的黄 色、红色、绿色以及蓝色分别对应四组发射光源703b的出射光,图16中的紫色出射 光对应于图17中右边的红色的出射光。如图17所示,激光雷达的探测装置17的纵向 视场约为106
°
,在视场中心位置处,角分辨率最小,为1.5
°
,在视场边缘处角分辨 率最大,为2.3
°
,全视场平均角分辨率约1.7
°
,扫描线分布如图18所示。
200.图19示出了根据本技术的一个实施例的激光雷达的探测装置17。相比于图6的结 构,图19中的探测装置17中,在发射孔707前方设置了光纤717,用于散射一部分出 射的光能量或者光束,以提供一种近场探测盲区的补充方案,从而不增加探测器的背 景噪声。具体地,该光纤717可以设置在出射孔707的中心相对靠外侧的位置,可以 避免过多的出射光束被该光纤717所散射。这种近场探测盲区补偿的方式在光电传感 元件704b采用sipm探测器的情形中是特别有利的。sipm探测器的功率响应下限很低, 通常需要避免采用补充接收端横向视场的方法来补充盲区。因此,在发射前端设计了 单根光纤向接收视线内散射一部分光能量的盲区补充方案,从而不增加探测器的背景 噪声。通过增加光纤717,盲区可以从0.4m缩短到0.01m。
201.第四方面
202.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以 相互组合。下面将参考附图并结合实施例来详细说明本技术的第四方面。
203.请参考图20,其示出了图20为现有技术中激光雷达的单线信号发射电路的一 个原理性示意图。
204.如图20所示,激光雷达的单线信号发射电路100包括:开关器件驱动器101、 开关器件102、发光器件103以及储能电容104。其中,开关器件驱动器101的输 入端输入脉冲信号。开关器件驱动器101的输出与开关器件102电连接。开关器件 102可以是开关三极管。开关器件驱动器101的输出端可以与开关三极管102的栅 极电连接。开关三极管的源极与地连接。发光器件103的正极与高电平信号线(hv) 电连接,发光器件的负极与开关三极管102的漏极电连接。此外,储能电容104作 为储能元件,一端输入高电平信号,一端与地连接。此外储能电容输入高电平信号 的一端与发光器件103的输入端电连接。
205.上述开关器件驱动器101输出的脉冲信号的电压大于开关三级管102的开启电 压时,开关三级管102的漏极与源极之间导通,电流将由高电压信号线流经发光器 件103、开关三极管102漏极、源极,从而发光器件103发出可以传输的光信号。 可以通过高电平信号线hv输出的信号电压的大小来控制光信号的强弱。此外,可 以通过开关器件驱动器101输出的脉冲信号控制发光器件103发出的光信号的持续 时间。
206.对于多线激光雷达,通常会包括多个发光器件。现有技术中对于每一个发光器 件会设置一个开关器件驱动器。一来不利于减小激光雷达的体积;二来,由于开关 器件驱动器的成本较高,使得多线激光雷达的成本也较高。
207.为了解决上述问题,本技术在激光雷达的发射电路中采用了信号分配器,以利 用较少的开关器件驱动器驱动较多的开关器件,从而可以减少激光雷达的发射电路 中所包括的器件的数量,有利于缩小激光雷达的体积。此外,由于信号分配器的成 本较开关器件驱动器的成本低,从而可以降低激光雷达的成本,有利于扩大激光雷 达的进一步推广。
208.请参考图21,图21示出了本技术实施例提供的激光雷达的发射电路的一种结 构示意图160。
209.如图21所示,激光雷达的发射电路200包括控制信号发生器201、开关器件 驱动器202、第一信号分配器203、多个开关器件204和多个发光器件205。
210.在本实施例中,发光器件205的数量可以为大于1的任意整数。例如16、26、 32、64等。
211.开关器件204的数量可以等于发光器件的数量。各开关器件204与各发光器件 205一一对应。
212.开关器件驱动器202适于驱动开关器件204。
213.控制信号发生器201的输出端与开关器件驱动器202的输入端电连接。开关器 件驱动器202的输出端与第一信号分配器203的信号输入端电连接。第一信号分配 器203包括多个输出端。每一个第一信号分配器203的输出端与一个开关器件204 一一对应。每一个第一信号分配器203的输出端与该输出端对应的开关器件204的 输入端(例如开关三极管的栅极)电连接。每一个开关器件204与一个发光器件205 一一对应。对于每一个开关器件204,该开关器件204的漏极与该开关器件204对 应的发光器件205的负极电连接,与该开关器件204对应的发光器件205的正极与 高电平信号线(hv)的电连接。
214.控制信号发生器201用于产生触发信号。通常触发信号的正向幅值和负向幅值 与开关器件开启电压和夹断电压可能不匹配。
215.开关器件驱动器202的作用是在控制信号发生器201产生的触发信号的触发 下,来开启驱动开关器件204。开关器件驱动器202输出的脉冲的宽度用于控制开 关器件204的导通时间,从而控制发光器件发射光信号的持续时间。开关器件驱动 器202输出的信号可以控制开关器件204的导通及关断。
216.在一些应用场景中,上述开关器件驱动器可以为gan开关器件驱动器。gan开 关器件驱动器设计简单,可实现2.5纳秒的极快传播延迟和1纳秒的最小脉冲宽 度。使用gan开关器件驱动器,使得开关器件的控制信号更加准确。可以用于控制 各种开关器件。
217.第一信号分配器203包括一个信号输入端、多个输出端、以及至少一个选址信 号输入端。第一信号分配器203输出端的数量可以与激光雷达的发射电路所使用的 发光器件
205的数量相匹配。第一信号分配器203的输出端的数量可以大于或者等 于上述发光器件205的数量。第一信号分配器203的至少一个选址信号输入端可以 输入选址信号。可以根据选址信号确定该选址信号对应的输出端。第一信号分配器 203可以将输入到第一信号分配器203上的、经过开关器件驱动器转换后的脉冲信 号,传输到由选址信号所确定的输出端。
218.在本实施例中,开关器件204可以是各种类型的开关三极管,例如硅基场效应 管、硅基mos管等。
219.在一些应用场景中,上述开关器件204可以是gan开关器件,例如硅基gan场 效应管、gan基场效应管等。
220.gan开关器件具有耐高温、易于集成、响应速度快等优点,适于作为多线激光 雷达的开关器件。
221.与这些应用场景相对应,上述开关器件驱动器202可以为gan开关器件驱动器。
222.上述发光器件205可以是各种发光器件,在一些应用场景中,上述发光器件可 以是无机半导体发光器件,例如半导体发光二极管(light emitting diode,led), 垂直腔面发射激光器(vertical cavity surface emitting laser,vcsel),边缘 发射激光器(edge emitting lasers,eel)等。
223.在本实施例中,开关器件驱动器202的数量可以为一个。第一信号分配器203 的输出端的数量可以与开关器件204的数量相匹配。这样一来,使用一个开关器件 驱动器就可以驱动全部开关器件。相对于每一个开关器件204设置一个对应的开关 器件驱动器,上述实施例中开关器件驱动器的数量大大减少了。一方面可以降低激 光雷达的发射电路的成本;另一方面可以减少激光雷达的发射电路所使用的器件的 数量,从而减少激光雷达的发射电路所占用的体积。
224.请参考图22,图22示出了本技术实施例提供的激光雷达的发射电路的另一种 结构示意图260。
225.如图22所示,激光雷达的发射电路300包括控制信号发生器301、至少两个 开关器件驱动器302、至少两个第一信号分配器303、多个开关器件304和多个发 光器件305,以及第二信号分配器306。
226.在本实施例中,发光器件305的数量可以为大于1的任意整数。例如16、26、 32、64等。
227.开关器件304的数量可以等于发光器件的数量。各开关器件304与各发光器件 305一一对应。
228.开关器件驱动器302适于驱动开关器件304。开关器件驱动器302的数量大于 等于2。开关器件驱动器302的数量可以等于第一信号分配器303的数量。各开关 器件驱动器302与各第一信号分配器303一一对应。
229.开关器件304与发光器件305的连接关系可以参考图21所示实施例的说明, 此处不赘述。
230.在本实施例中,第一信号分配器303的数量可以大于等于2。
231.每一个第一信号分配器303可以包括一个信号输入端、至少一个选址信号输入 端、至少两个输出端。上述至少两个第一信号分配器303的输出端的数量之和可以 与开关器件304的数量相匹配。例如各第一信号分配器303的输出端的数量之和等 于开关器件304
的数量。每一个开关器件304可以与一个第一信号分配器303的一 个输出端一一对应。
232.对于每一个第一信号分配器303,第一信号分配器303的信号输入端与该第一 信号分配器303对应的开关器件驱动器302的信号输出端电连接;选址信号输入端 与选址信号线电连接。对于第一信号分配器303的每一输出端,该输出端与该输出 端对应的开关器件304的输入端电连接。
233.控制信号发生器301与上述至少两个开关器件驱动器302之间,通过第二信号 分配器306实现电连接。
234.第二信号分配器306包括第一输入端、至少一个第二输入端和至少两个第一输 出端;其中,上述第一输入端与控制信号发生器301的控制信号输出端电连接。至 少一个第二输入端与第一选址信号线电连接。第一选址信号线的数量可以大于等于 1。在每一个时刻,可以根据各第一选址信号线上传输的信号来确定第二信号分配 器306的一个第一输出端。每一个第一输出端可以与该第一输出端对应的一个开关 器件驱动器的输入端电连接。在本实施例中,各开关器件驱动器302分别与各第一 输出端一一对应。
235.每一个第一信号分配器303的输出端的数量可以小于图22所示的激光雷达的 发射电路300所采用的开关器件的数量。
236.第二信号分配器306的第一输出端的数量可以与图22所示的激光雷达的发射 电路300所采用的开关器件驱动器302的数量相匹配。例如第二信号分配器306的 第一输出端的数量可以等于激光雷达的发射电路300所采用的开关器件驱动器302 的数量。
237.以发光器件305的数量为64为例进行说明。第二信号分配器306的第一输出 端的数量可以为2,第一信号分配器的输出端的数量可以为32。或者,第一信号分 配器的第一输出端的数量为4,第一信号分配器的输出端的数量可以为16。又或者, 第二信号分配器的第一输出端的数量为8,第一信号分配器的输出端的数量为8等。
238.本实施例提供的激光雷达的发射电路,通过在激光雷达的发射电路中设置第一 信号分配器和第二信号分配器,实现了减少用于驱动多个开关器件的开关器件驱动 器的目的。可以降低激光雷达的发射电路的成本,有助于缩小发射电路的体积。
239.请参考图23,图23示出了本技术实施例提供的激光雷达的发射电路的另一种 结构示意图400。
240.在本实施例中,激光雷达的发射电路400包括控制信号发生器401、至少两个 开关器件驱动器402、至少两个第一信号分配器403、多个开关器件404和多个发 光器件405,以及至少二个第三信号分配器406。
241.在本实施例中,发光器件405的数量可以为大于1的任意整数。例如16、26、 32、64等。
242.开关器件404的数量可以等于发光器件405的数量。各开关器件404与各发光 器件405一一对应。
243.开关器件驱动器402适于驱动开关器件404。开关器件驱动器402的数量大于 等于2。开关器件驱动器402的数量可以等于第一信号分配器403的数量。各开关 器件驱动器402与各第一信号分配器403一一对应。
244.开关器件404与发光器件405的连接关系可以参考图21所示实施例的说明, 此处不赘述。第一信号分配器403与开关驱动器的连接关系可以参考图22所示实 施例的说明,
此次不赘述。
245.在本实施例中,第三信号分配器406包括第三输入端、至少一个第四输入端、 至少两个第二输出端。
246.控制信号发生器401可以包括至少二组控制信号输出端。控制信号发生器的至 少二组控制信号输出端,在每一个时刻只有一组控制信号输出端为有效工作状态。 每一组控制信号输出端与一个第三信号分配器一一对应。控制信号发生器401的一 组控制信号输出端与该控制信号输出端对应的第三信号分配器的第三输入端电连 接。
247.第三信号分配器406的至少一个第四输入端与第二选址信号线电连接。第二选 址信号线上的选址信号用于指示第三分配器将所输入的信号传输到第三分配器的 由选址信号指定的输出端。
248.上述至少两个第三信号分配器406各自对应的第二输出端的总数量可以等于 上述开关器件402的总数量。
249.每一个第二输出端与一个开关器件驱动器402一一对应。
250.每一个第二输出端与该第二输出端对应的一个开关器件驱动器402的输入端电 连接。
251.在本实施例中,每一个第一信号分配器403的输出端的数量可以小于图23所 示的激光雷达的发射电路400所采用的开关器件的数量。
252.各第三信号分配器406的输出端的数量总和可以与图23所示的激光雷达的发 射电路400所采用的开关器件驱动器的数量相匹配。例如各第三信号分配器406的 第三输出端的数量总和可以等于激光雷达的发射电路400所采用的开关器件驱动器 402的数量。
253.如图23所示,在本实施例中,控制信号发生器401的控制信号输出端可以为 4组。第三信号分配器的数量可以为4个。第一信号分配器的数量为可以为8个。
254.在本实施例的一些应用场景中,上述激光雷达的发射电路400所使用的发光器 件的数量为64。在这些应用场景中,第三信号分配器可以为2路信号分配器。上述 第一信号分配器可以为8路信号分配器。
255.以下说明具体工作过程,控制信号发生器的4组控制信号输出端分别可以是 t
‑
ap/n、t
‑
bp/n、t
‑
cp/n、t
‑
dp/n。4个第三信号分配器406分别可以为a、b、c、 d。t
‑
ap/n、t
‑
bp/n、t
‑
cp/n、t
‑
dp/n输出的触发信号分别在不同时刻被传输到上 述a、b、c、d各自的第三输入端。这里的t
‑
ap/n表示t
‑
ap信号(正向信号)输 出端和t
‑
an信号(负向信号)输出端。t
‑
bp/n、t
‑
cp/n、t
‑
dp/n同理。在触发信 号被传输到第三信号分配器(如a、b、c或d)后,以a为例,a对应两个可能的 输出端:o
‑
ap/n1和o
‑
ap/n2。a的第四输入端输入的选址信号可以控制a将触发信 号传输到o
‑
ap/n1端,或者o
‑
ap/n2端。若触发信号被传输到o
‑
ap/n1端,与o
‑
ap/n1 输出端电连接的开关器件驱动器将被触发进入工作状态。该开关器件驱动器402发 出的驱动信号经过第一信号分配器403后被分配到一个开关器件404上。上述驱动 信号的长度可以由o
‑
ap1与o
‑
an1分别作用在上述开关器件404上的时间间隔来确 定。上述开关器件驱动器402发出的驱动信号的长度可以决定使上述开关器件404 导通的时长。当开关器件404导通时,发光器件405在hv信号的作用下发光。上 述驱动信号与hv信号确定发光器件405所发出的探测信号的能量。同一时刻, t
‑
ap/n、t
‑
bp/n、t
‑
cp/n、t
‑
dp/n输出的触发信号只有一路有信号。
256.此外,控制信号发生器401的控制信号输出端的数量可以为4个,第三信号分 配器406可以为4路信号分配器,第三信号分配器406的数量可以为4个。第一信 号分配器403可以为4路信号分配器。第一信号分配器403的数量可以为16个。
257.此外,控制信号发生器401的控制信号输出端的数量可以为2个,第三信号分 配器406可以为4路信号分配器,第三信号分配器406的数量可以为2个。第一信 号分配器403可以为8路信号分配器等,第一信号分配器403的数量可以为8个。
258.从以上可以看出,可以设置第一信号分配器403的输出端的数量、控制发生器 401的控制信号端的数量、第三信号分配器406输出端的数量的乘积等于激光雷达 的发射电路所使用的发光器件的数量,均可以实现使用较少的开关器件驱动器402 驱动较多的开关器件,达到减少信号发射电路所使用过的器件的数量,降低激光雷 达的成本的目的。
259.本实施例提供的激光雷达的发射电路,通过在激光雷达的发射电路中设置第一 信号分配器和第二信号分配器,实现了减少用于驱动多个开关器件的开关器件驱动 器的目的。可以降低激光雷达的发射电路的成本,有助于缩小发射电路的体积。从 而达到降低激光雷达的成本,缩小激光雷达的体积的目的。
260.请参考图24,图24示出了本技术实施例提供的激光雷达一种结构示意图500。
261.如图24所示,激光雷达500包括信号发射装置和信号接收装置。其中,信号 发射装置包括如图21、图22、或者图23所示的激光雷达的发射电路。
262.上述激光雷达可以用于距离测量,障碍物识别等。所述激光雷达例如可包括本 申请第一方面、第二方面、第三方面中提及的其他特征。
263.请参考图25,图25示出了本技术实施例提供的激光雷达的测距方法的一个示 意性流程图600。
264.在本实施例中,激光雷达可以为图24所示的激光雷达。激光雷达的信号发射 装置可以包括如图21、图22或图23所示的信号发射电路。
265.信号发射装置包括多个发光器件。激光雷达可以控制多个发光器件依次发出探 测信号。
266.对于多个发光器件中的每相邻两个发光器件,该相邻两个发光器件按照发射探 测信号的先后依次被视为第一发光器件和第二发光器件。第一发光器件所发出的第 一探测信号对应第一飞行时间。
267.如图25所示,该激光雷达的测距方法可以包括:
268.步骤601,信号发射装置控制多个发光器件依次发射探测信号,对于每相邻两 个发光器件,控制第一发光器件和第二发光器件依次发出第一探测信号和第二探测 信号之间的时间间隔,大于第一飞行时间。
269.步骤602,信号接收装置接收由各探测信号遇到障碍物分别产生的回波信号。
270.步骤603,基于各探测信号的发射时刻与各回波信号的接收时刻,确定各探测 信号的飞行时间。
271.步骤604,根据飞行时间确定障碍物与激光雷达之间的距离。
272.在本实施例中,这里的相邻两个发光器件是指在发光顺序上相邻的两个发光器 件。在一些应用场景中,上述相邻两个发光器件也可以是在空间中相邻的两个发光 器件。
273.在本实施例中,对于每一个发光器件,信号发射装置可以控制传输到该发光器 件
对应的开关器件的导通时间,来控制该发光器件发出探测信号的时间。
274.此外,信号发射装置还可以通过控制输入到各发光器件正极的hv信号的强度, 来控制各发光器件发出的光的光强。
275.对于发光器件中的发射时间上每相邻的两个发光器件,该相邻两个发光器件先 发出探测信号的发光器件可以视为第一发光器件,后发出探测信号的发光器件可以 视为第二发光器件。第一发光器件所对应的探测信号发出时间可以为第一时间,第 二发光器件所对应的探测信号的发出时间可以为第二时间。上述第二时间和第一时 间的时间差可以大于第一发光器件发出的探测信号的第一飞行时间。
276.每一探测信号的飞行时间(time of flight,tof)可以认为是该探测信号发 出的时刻与接收到该探测信号遇到障碍物形成的回波信号的时刻之间的时间间隔。
277.将相邻两个发光器件依次发出探测信号的时间间隔,设置为大于该相邻两个发 光器件发出的探测信号中较早发出的探测信号的飞行时间,因此可以降低相邻两个 发光器件彼此之间的串扰。
278.对于每一个探测信号,该探测信号的飞行时间与光速的乘积,可以视为激光雷 达与障碍物之间的距离。
279.使用多个发光器件的激光雷达,在测量一障碍物时,由多个发光器件可以得到 激光雷达与该障碍物的多个初始距离。每一个初始距离与一个发光器件所发出的探 测信号对应。
280.可以综合上述多个初始距离,确定较为精确的激光雷达与上述障碍物之间的距 离。
281.在一些可选的实现方式中,上述步骤603可以进一步包括:对于每一探测信号, 基于该探测信号的发射时间与该探测信号对应的回波信号的接收时间以及预先测 定的补偿时间,确定该探测信号的飞行时间。
282.上述补偿时间主要是用于补偿激光雷达的发射电路中的寄生电容导致的飞行 时间的偏差。
283.激光雷达的发射电路会产生寄生电容。寄生电容的存在会消耗开关器件的栅极 所输入的驱动脉冲信号。以开关器件驱动器所发出的驱动脉冲信号达到光发射器件 的开启电压的时刻为参考时刻为例,上述寄生电容的存在,使得光发射器件的实际 导通时刻要迟于上述参考时刻。若以上述参考时刻计算探测信号的飞行时间,探测 信号的实际飞行时间将小于测量得到的探测信号的飞行时间,使得测得激光雷达所 测量的激光雷达与障碍物之间的距离不准确。
284.可以使用标定测试的方法,来测量光发射器件实际导通时刻与上述参考时刻之 间的时间差,将上述时间差作为补偿时间。在计算探测信号的飞行时间时,将由光 发射器件发出探测信号的上述参考时刻、接收到该探测信号遇到障碍物的产生的回 波信号的时刻之间的时间间隔与上述补偿时间之差,确定为用于计算距离的探测信 号的飞行时间
285.通过对探测信号的飞行时间的补偿,使得用于计算距离的探测信号的飞行时间 更加接近于探测信号的实际飞行时间,从而使得所测得的激光雷达与障碍物之间的 距离更加准确。
286.本技术实施例还提供一种可用于激光雷达的信号处理方法,包括:
287.通过控制信号发生器输出触发信号至开关器件驱动器;
288.通过所述第一信号分配器,将至少一个开关器件驱动器中的每个开关器件驱动 器输出的驱动信号依次输出至开关器件,以控制所述开关器件的开闭;和
289.通过所述开关器件的开闭来控制发光器件的发光。
290.本技术的第四方面涉及激光雷达的发射电路、以及发射端的信号处理方法。其 中的发射电路200、300和400以及信号处理方法可以与本技术的第一方面、第二 方面、第三方面的激光雷达相结合,例如用作激光雷达的发射电路以及其中的信号 处理方法。例如,参考图7和图8,发射支撑体701的后端的外部设置有光束发射器 件703,光束发射器件703包括发射电路板703a和m
×
n个发射光源703b。本技术第 四方面的发射电路中的发光器件205、305、405可用作图8中的发射光源703b,同时 例如可以将本技术第四方面的发射电路的其他元器件,诸如控制信号发生器、开关器 件驱动器、第一信号分配器、第二信号分配器、第三信号分配器、多个开关器件等, 同样集成在所述发射电路板703a上,从而可以将本技术第四方面的激光雷达发射 电路的技术方案以及信号处理方法,结合到前述的激光雷达中。这种结合对于本领 域技术人员是容易理解的,不需要付出创造性的劳动,此处不再赘述。
291.第五方面
292.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以 相互组合。下面将参考附图并结合实施例来详细说明本技术。
293.请参考图26,其示出了现有技术中用于激光雷达的信号接收器的一个原理性结 构示意图。
294.激光雷达的信号接收器可以包括多个光电信号接收器。光电信号接收器用于将 接收到的光信号转换成电信号。
295.如图26所示,现有激光雷达中的信号接收电路包括多个信号接收子单元70。 每个信号接收子单元70包括一个光电信号接收器71、信号放大器72和电压比较器 73。
296.每一个信号接收子单元70可以对应激光雷达发射装置中的一个发光器件。对 于每一个信号接收子单元70,该信号接收子单元70中的光电信号接收器71可以接 收与该信号接收子单元70对应的发光器件发出的探测信号遇到障碍物返回的回波 信号。这里的回波信号为较为微弱的光信号。并将该回波信号转换成电信号。该信 号接收子单元70中的信号放大器72将上述电信号放大。被放大的电信号为连续电 压信号。该信号接收子单元70中的电压比较器73用于将上述连续电压信号转换成 脉冲电压信号。
297.可以根据脉冲电压信号对回波信号做进一步的分析。
298.因为现有激光雷达为多线激光雷达。发射端包括多个发光器件,相应地,信号 接收端可以包括多个光电信号接收器。对于每个光电信号接收器需要设置一一对应 的信号放大器。这样一来,激光雷达所包括的器件的数量较多,成本较高,不利于 激光雷达的大范围推广。
299.针对上述问题,可以采用本技术各实施例所提供的技术方案。
300.请参考图27,图27示出了本技术实施例提供的激光雷达的接收电路的一种结 构示意图。
301.如图27所示,激光雷达的接收电路800包括多个光电信号接收器801、第一 信号选
择器802、信号放大器803和电压比较器804。
302.光电信号接收器801的数量可以为大于等于1的任意自然数。例如8个、16 个、24个、64个等。光电信号接收器的数量可以根据具体的应用场景进行设置。 上述光电信号接收器例如可以是光电管、光电倍增管、硅光电池、光电二极管、雪 崩光电二极管、pin光电二极管、硅光电倍增管(silicon photomultiplier,sipm)、 单光子雪崩二极管(single photon avalanche diode,spad)等。
303.对于每一个光电信号接收器,可以控制该光电信号接收器的工作时间与该光电 信号接收器对应的、激光雷达的信号发射端的发光器件发出探测信号的时间相匹 配。例如,一个光电信号接收器,可以控制该光电信号接收器的工作时间从与该光 电信号接收器对应的、激光雷达的信号发射端的发光器件发出探测信号的时间开 始,到该光电信号接收器接收到上述探测信号的回波信号后结束。
304.在本实施例中,每一个光电信号接收器801的输出端可以与第一信号选择器 802的一个信号输入端一一对应。每一个光电信号接收器801的输出端可以与该光 电信号接收器801的输出端对应的、第一信号选择器802的信号输入端电连接。第 一信号选择器802可以具有地址信号输入端。地址信号输入端可以与地址信号线电 连接。使用地址信号输入端输入的地址信号可以控制第一信号选择器802将传输到 自身的哪个信号输入端的信号,传输到第一信号选择器802的输出端。上述地址信 号线上的地址信号、控制各光电信号接收器工作时间的控制信号可以互相匹配。
305.第一信号选择器802的输出端与信号放大器803的信号输入端电连接。在一些 应用场景中,光电信号接收器801输出的信号可以是电流信号,信号放大器803可 以将输入到其中的电流信号转为电压信号,并对电压信号进行放大。在另外一些应 用场景中,光电信号接收器801输出的信号可以是电压信号,信号放大器803可以 将输入到其中的、由光电信号接收器输出的电压信号进行放大。通常,信号放大器 803输出的电压信号为连续电压信号。
306.电压比较器804,用于将信号放大器803输出的连续电压信号,转为脉冲电压 信号。电压比较器804具有第一输入端和第二输入端。信号放大器803的输出端与 电压比较器804的第一输入端电连接,电压比较器804的第二输入端与预设阈值电 压信号线电连接。上述预设阈值电压信号线上传输的阈值电压可以根据应用场景进 行变化。
307.在一些应用场景中,可以将多个光电信号接收器801设置在同一载体上。在该 载体上还可以设置2个第一信号选择器802、2个信号放大器803和2个电压比较 器804。在这些应用场景中,上述多个光电信号接收器801可以分为2组。每一组 光电信号接收器801对应一个第一信号选择器802。例如,若上述总的光电信号接 收器801的数量为16个,则可以将16个光电信号接收器801分为2组,每组8个 光电信号接收器801。每组的8个光电信号接收器801对应一个第一信号选择器802。 每一组的各光电信号接收器801的输出端分别与该组光电接器801对应的第一信号 选择器802的各个信号输入端一一对应连接。第一信号选择器802的输出端可以与 一个信号放大器803的信号输入端电连接。信号放大器803可以具有使能信号输入 端。每一个信号放大器803的输出端可以与电压比较器804的第一输入端电连接。 电压比较器803的第二输入端与预设阈值电压信号线电连接。
308.这样一来,在激光雷达的信号接收电路中,在多个光电信号接收器与信号放大 器
之间使用第一信号选择器,可以将不同光电信号接收器输出的电信号按照预设顺 序输入到数量较少的信号放大器中。相比于在激光雷达中对每一个光电信号接收器 设置一个信号放大器,本实施例提供的方案减少了信号放大器的使用数量,降低了 激光雷达的成本,有利于激光雷达的进一步推广。
309.请参考图28,其示出了本技术实施例提供的激光雷达的接收电路的另一种结 构示意图。
310.与图27所示实施例相同的是,图28所示的激光雷达的接收电路900包括多个 光电信号接收器901、第一信号选择器、信号放大器、电压比较器904。
311.与图27不同的是,本实施例中,多个光电信号接收器901,至少一个信号放大 器以及至少一个电压比较器被分为至少两个接收电路子组。
312.对于每一个接收电路子组,该接收电路子组可以包括至少两个光电信号接收器 901、至少一个信号放大器、一个电压比较器905,其中,上述至少两个光电信号接 收器901与上述至少一个信号放大器之间通过至少一个第一信号选择器实现电连 接。
313.在本实施例中,上述第一信号选择器的数量可以是2个、3个,或者其他数量。 第一信号选择器的数量可以小于光电信号接收器的数量。
314.对于每一个接收电路子组,其上的光电信号接收器、第一信号选择器、信号放 大器、电压比较器的连接关系,可以参考图27所示实施例的说明,此处不赘述。
315.在一些应用场景中,上述多个光电信号接收器901,至少一个信号放大器以及 至少一个电压比较器905被分为四个接收电路子组(如图28所示的banka、bankb、 bankc、bankd)。对于每一个接收电路子组(如banka),该接收电路子组包括至少 两个光电信号接收器901、至少一个信号放大器、一个电压比较器905。至少两个 光电信号接收器901与至少一个信号放大器之间通过至少一个第一信号放大器实现 电连接。上述信号放大器的数量可以是一个,也可以是两个,还可以是多个。信号 放大器的数量可以小于光电信号接收器901的数量。
316.在本实施例中,上述每一个接收电路子组(如图28所示的banka)还可以包括 第二信号选择器904。该接收电路子组(如banka)所包括的各信号放大器的输出 端分别与第二信号选择器的904各信号输入端一一对应电连接。第二信号选择器 904的输出端与该接收电路子组的电压比较器905的第一输入端电连接。电压比较 器905的第二输入端与预设阈值电压信号线vtha电连接。可以理解的是,对于接 收电路子组bankb,其对应的预设阈值电压信号线为vthb;对于接收电路子组 bankc,其对应的预设阈值电压信号线为vthc;对于接收电路子组bankd,其对应 的预设阈值电压信号线为vthd,但由于bankb、bankc、bankd被banka遮挡,因此 并未一一示意出,但其具体方案,本领域技术人员可以参考对banka的示意进行理 解,bankb、bankc、bankd与banka的结构图相同。另外,由于接收电路子组banka、 bankb、bankc、bankd在竖直方向上依次排列,而处于不同竖直方向处的接收电路 子组对障碍物的探测需求可能不同,因此vtha、vthb、vthc及vthd可以不同。
317.在一些应用场景中,上述激光雷达的信号接收电路中所包括的光电信号接收器 901的数量为64个。对于每一接收电路子组,该接收电路子组可以包括16个光电 信号接收器901、2个第一信号选择器、2个信号放大器、1个第二信号选择器904、 1个电压比较器905。其中,上述16个光电信号接收器901中的前8个光电信号接 收器901的输出端与第一个第一
信号选择器9021的各信号输入端一一对应地电连 接;后8个光电信号接收器901的输出端与第二个第一信号选择器9022的各信号 输入端一一对应地电连接。第一个第一信号选择器9021和第二个第一信号选择器 9022均具有地址信号输入端。在一些应用场景中,第一个第一信号选择器9021和 第二个第一信号选择器9022的地址信号输入端可以均与地址信号线a0、a1、a2电 连接。地址信号线a0、a1、a2上传输的信号用于确定第一个第一信号选择器和第 二个第一信号选择器选择哪一个输入信号作为输出。在另外一些应用场景中,第一 个第一信号选择器9021的地址信号输入端和第二个第一信号选择器9022的地址信 号输入端各自对应的地址信号线可以彼此独立。这样可以做更相对独立的选择。
318.第一个第一信号选择器9021的输出端与第一个信号放大器9031的信号输入端 电连接;第二个信号选择器9022的输出端与第二个信号放大器9032的信号输入端 电连接。第一个信号放大器9031的输出端和第二个信号放大器9032的输出端分别 与第二信号选择器904的信号输入端电连接。
319.第一信号放大器9031、第二信号放大器9032均具有使能信号输入端。使能信 号输入端与使能信号线电连接。对于banka,使能信号线如图28所示的ena;对于 bankb,使能信号线如图28所示的enb;对于bankc,使能信号线如图28所示的enc; 对于bankd,使能信号线如图28所示的end。第二信号选择器904具有地址信号输 入端,地址信号输入端与地址信号线a3电连接。
320.第二信号选择器904的输出端与电压比较器905的第一输入端电连接。电压比 较器905的第二输入端与预设阈值电压信号线vtha电连接。经过电压比较器905, 上述banka输出脉冲电压信号pa,banka输出脉冲电压信号pb,bankc输出脉冲电 压信号pc,bankd输出脉冲电压信号pd。
321.对于每一个bank(如banka),该bank的多个光电信号接收器901可以排成一 个光电信号接收器阵列(如图28所示的单列排列)。从光电信号接收器阵列出来的 16路光电信号,先经过2个8路信号选择器9021和9022,然后进入2个宽带信号 放大器9031、9032,再经过2路信号选择器904,合成一路或者说选其中一路后, 进入电压比较器905,与阈值vtha进行比较,若大于阈值vtha,则输出脉冲信号, 并进而转化为低压差分信号进行后续分析处理。
322.另外,对于每一个光电信号接收器901形成的通路而言,阈值vtha可以不同, 因为可能不同的通路对应不同的探测需求。在每个光电信号接收器阵列中,任意时 刻只能选择其中一路光电信号接收器生成的信号,进行放大比较,且比较器的阈值 vtha可以动态调整。阈值vtha比如可以与激光雷达的预设探测距离有关。对于近 处的目标,或者高反目标,回波信号太强,以至于信号放大器的脉宽无法反应回波 信号强度,这时需要适当调低阈值,以获取反射率信息。换言之,预设探测距离越 低,阈值越高;预设探测距离越高,阈值越低。
323.参考图28,banka、bankb、bankc、bankd的光电信号接收器竖直依次排列, 对于处于相对边缘的banka中的光电信号接收器,可能探测需求是测远,也就是尽 可能探测更远的距离,则对应于banka中的阈值电压vtha则较低;类似地,对于 处于相对中央的bankb中的光电接收单元,可能探测需求是密度较高但距离较近, 则对应于bankb中的阈值电压vthb则较高。
324.信号放大器具有使能信号输入端(控制开关)。由使能信号(例如图28所示的 使能信号线ena、enb、ebc上传输的使能信号)控制,可以在无需探测时被控制关 闭,故可以降低功耗。由于信号放大器从低功耗状态中恢复需要1
‑
2us的时间,因 此需要提前给出使能信号。比如需要信号放大器在t2时刻开始工作,在使能信号 设计上可以在(t2
‑
[1
‑
2us])的时间点向信号放大器发使能信号,使得该信号放大 器可以在t2准时开始进入工作状态。
[0325]
与图27所示实施例相比,本实施例将在激光雷达的信号接收电路分为至少两 个接收电路子组,每个子组对个至少两个光电信号接收器、至少一个第一信号选择 器、至少一个电压比较器,可以提高对所接收的探测信号的回波信号的速度。一方 面可以降低激光器的成本,另一方面还可以确保激光雷达的响应速度。有利于激光 雷达的进一步推广。
[0326]
此外,本技术实施例还提供的激光雷达。激光雷达包括信号发射装置和信号接 收装置。信号接收装置包括如上所示的实施例提供的激光雷达的信号接收电路。所 述激光雷达例如可包括本技术第一方面、第二方面、第三方面、第四方面中提及的 其他特征。
[0327]
请参考图29,其示出了本技术实施例提供的激光雷达的测距方法的一个流程 示意图。
[0328]
如图29所示,激光雷达的测距方法1000包括如下步骤:
[0329]
步骤1001,信号发射装置控制多个发光器件依次发射探测信号。
[0330]
步骤1002,信号接收装置所包括的各光电信号接收器依次接收各所述探测信 号遇到障碍物分别产生的回波信号。
[0331]
步骤1003,基于各所述探测信号的发射时刻、各所述回波信号的接收时刻以 及预先测定的补偿时间,依次各所述探测信号的飞行时间。
[0332]
步骤1004,根据所述飞行时间确定所述障碍物与所述激光雷达之间的距离。
[0333]
这里,每一探测信号的飞行时间(time of flight,tof)可以认为是该探测 信号发出的时刻与接收到该探测信号遇到障碍物形成的回波信号的时刻之间的时 间间隔。
[0334]
对于每一个探测信号,该探测信号的飞行时间与光速的乘积,可以视为激光雷 达与障碍物之间的距离。
[0335]
上述补偿时间主要是用于补偿激光雷达的接收电路中的寄生电容导致的飞行 时间的偏差。上述寄生电容可以是由第一信号选择器和/或第二信号选择器引起的。
[0336]
激光雷达的接收电路会产生寄生电容。寄生电容的存在会消耗电压。使得电压 比较器输出的脉冲信号电压的上升沿的上升时刻迟于理论上由回波信号、在信号接 收电路无寄生电容时生成的脉冲电压信号的上升沿的上升时刻。故而探测信号的实 际飞行时间将小于测量得到的探测信号的飞行时间,使得测得激光雷达所测量的激 光雷达与障碍物之间的距离不准确。
[0337]
可以使用标定测试的方法,来测量电压比较器输出的脉冲信号电压的上升沿的 上升时刻与理论上由回波信号、在信号接收电路无寄生电容时生成的脉冲电压信号 的上升沿的上升时刻之间的时间差,将上述时间差作为补偿时间。在计算探测信号 的飞行时间时,将由光发射器件发出探测信号的上述参考时刻、接收到该探测信号 遇到障碍物的产生的回波信号的时刻之间的时间间隔与上述补偿时间之差,确定为 用于计算距离的探测信号的飞行时间。
[0338]
本技术实施例还提供一种可用于激光雷达的信号处理方法,包括:
领域的普通技术人员应该明白,可以在形式上和细节上对其作各种改变,而不偏离本 申请的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。