1.本公开一般地涉及用于治疗脊柱疾病的医疗装置,并且更具体地涉及用于矫正脊柱疾病的手术系统和方法。
背景技术:
2.例如退变性椎间盘疾病、椎间盘突出症、骨质疏松症、脊椎滑脱症、狭窄症、脊柱侧凸症、脊柱后凸症和其它曲度异常、肿瘤以及骨折的脊椎病症可能起因于包含由损伤和老化造成的创伤、疾病和退变性病况的因素。脊柱病症通常导致包括疼痛、神经损伤和部分或完全丧失活动性的症状。
3.非外科治疗(如药物治疗、康复治疗和运动)可以是有效的,但是可无法缓解与这些疾病相关联的症状。这些脊柱病症的手术治疗包括矫正、韧带整复术、椎体切除术、椎间盘切除术、椎板切除术、融合术、固定术和植入式假体。用于椎骨的定位和对准的矫正治疗可采用脊柱植入物,这些脊柱植入物包括脊柱构造物和椎体间装置,用于稳定脊柱的治疗区段。在一些情况下,脊柱植入物可用手术器械进行操纵以压缩和牵引椎骨。本公开描述优于这些先前技术的改进。
技术实现要素:
4.在一个实施例中,提供了一种手术器械。该手术器械包括具有配接表面的第一构件,该配接表面可与第一刀片和高度控制器连接。高度控制器可与手术牵引器连接并且被配置为相对于手术牵引器平移第一构件。第二构件包括第二刀片并且可相对于第一构件移动,使得刀片可移动以间隔开脊椎附近的组织。在一些实施例中,公开了手术系统、构造物、植入物和方法。
5.在一个实施例中,提供了一种手术系统。手术系统包括第一植入物支撑件和第二植入物支撑件。植入物支撑件与固定在椎骨组织上的骨紧固件接合。手术牵引器可与植入物支撑件接合。手术牵开器具有第一构件,该第一构件包括可与第一刀片和高度控制器部件连接的配接表面。高度控制器可与手术牵引器连接并且被配置为相对于手术牵引器平移第一构件。手术牵开器还具有第二构件,该第二构件包括第二刀片并且可相对于第一构件移动,使得刀片可移动以间隔开脊椎附近的组织。
6.在一个实施例中,手术系统包括第一植入物支撑件和第二植入物支撑件。植入物支撑件与固定在椎骨组织上的骨紧固件接合。手术牵开器可与植入物支撑件接合并且包括第一刀片和第二刀片。稳定元件与植入物支撑件一起布置并且可交替地与第一刀片或第二刀片接合。
附图说明
7.本公开根据伴随以下附图的具体描述将变得更容易地显而易见,在附图中:
8.图1是根据本公开的原理的手术系统的一个实施例的部件的透视图;
9.图2是根据本公开的原理的手术系统的一个实施例的部件的透视图;
10.图3是图2中所示部件的透视图,其中零件被分开;
11.图4是根据本公开的原理的手术系统的一个实施例的部件的分开侧视图;
12.图5是根据本公开的原理的手术系统的一个实施例的部件的顶视图;
13.图6是沿图1中的线a
‑
a截取的部件的横截面;
14.图7是沿图1中的线b
‑
b截取的部件的横截面图;
15.图8是根据本公开的原理的手术系统的一个实施例的部件的透视图,设置有分开的零件;
16.图9是根据本公开的原理的手术系统的一个实施例的部件的透视图,其中一些零件被分开;
17.图10是根据本公开的原理的手术系统的一个实施例的部件的透视图;
18.图11是患者身体的透视图;
19.图12是设置有椎骨的根据本公开原理的手术系统的一个实施例的部件的侧视图;
20.图13是根据本公开的原理的手术系统的一个实施例的部件的透视图;
21.图14是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
22.图15是根据本公开原理的与椎骨安置在一起、安置有患者身体的手术系统的一个实施例的部件的透视图;
23.图16是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
24.图17是图16所示细节a的放大图;
25.图18是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
26.图19是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
27.图20是图19所示细节b的放大图;
28.图21是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
29.图22为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的平面视图;
30.图23为安置有椎骨的根据本公开的原理的手术系统的一个实施例的部件的平面视图;
31.图24是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
32.图25是图24中所示的部件的平面视图;
33.图26是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
34.图27是图26中所示的部件的平面视图;
35.图28是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的
透视图;
36.图28a是根据本公开原理的手术系统的一个实施例的部件的透视图;
37.图29是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
38.图30是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
39.图31为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的顶透视图;
40.图32为根据本公开的原理的手术系统的一个实施例的部件的透视图;
41.图33为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的平面视图;
42.图34为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的侧视图;
43.图35是根据本公开原理的安置有患者身体的手术系统的一个实施例的部件的透视图;
44.图36是根据本公开原理的安置有患者身体的手术系统的一个实施例的部件的透视图;
45.图37是根据本公开原理的与椎骨安置在一起的手术系统的一个实施例的部件的透视图;
46.图38为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的平面视图;
47.图39是根据本公开原理的安置有患者身体的手术系统的一个实施例的部件的透视图;
48.图40为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的平面视图;
49.图41是根据本公开原理的安置有患者身体的手术系统的一个实施例的部件的透视图;和
50.图42为安置有患者身体的根据本公开的原理的手术系统的一个实施例的部件的平面视图。
51.具体实施方法
52.所公开的系统和相关使用方法的示例性实施例在用于治疗肌肉骨骼疾病的医疗装置方面进行了讨论,并且更具体地,在用于矫正脊柱疾病的手术系统和方法方面进行了讨论。在一些实施例中,本手术系统包括手术器械,所述手术器械允许椎骨操纵以治疗如本文所述的脊柱疾病,用于管理脊柱前凸和/或脊柱后凸恢复。在一些实施例中,手术器械允许椎骨组织的平行牵引和/或压缩。
53.在一些实施例中,本手术系统包括手术创伤器械。在一些实施例中,本手术系统与矫正复杂脊柱畸形的方法一起使用。在一些实施例中,本手术系统与治疗退行性脊柱疾病的方法一起使用和/或与经椎间孔腰椎椎体间融合术一起使用。在一些实施例中,本手术系统被配置成与矢状调节螺钉(sas)、固定轴螺钉(fas)和/或多轴螺钉(mas)一起使用。在一
些实施例中,本手术系统包含用于治疗退行性脊柱病症的单个牵引器,例如,用于沿椎骨的被定向成用于减压和/或椎体间笼插入的侧面安置。
54.在一些实施例中,本手术系统包括与适配器连接的手术器械,所述适配器与具有连接到其上的延伸器凸片的骨螺钉一起使用。在一些实施例中,本手术系统包括植入物支撑件,该植入物支撑件包括连接器和适配器。在一些实施例中,连接器包括配置成用于与延伸器连接的外套筒。在一些实施例中,适配器与延伸器连接以插入植入物(例如脊柱杆)。在一些实施例中,适配器包括具有将连接器与压缩器/牵开器连接的枢转铰链的臂。在一些实施例中,枢转铰链允许部件移动以为手术间成像提供手术部位可见性。在一些实施例中,压缩器/牵引器用于大体平行牵引。在一些实施例中,压缩器/牵引器用于平行牵引。在一些实施例中,手术器械包括具有可逆棘轮的压缩器/牵引器,所述可逆棘轮具有中立的可自由移动的位置。在一些实施例中,本手术系统与经皮植入骨紧固件的手术一起使用。
55.在一些实施例中,本手术系统包括与手术方法一起使用的手术器械,该手术方法包括以下步骤:预组装牵引器;预加载对齐引导件;准备植入螺钉;连接螺钉凸片;移除对齐引导件;连接具有用于分段牵引的铰接架的压缩器/牵开器;植入椎间盘和减压组织,插入杆长卡尺;插入杆和固定螺钉;执行分段压缩;断裂固定螺钉凸片;和移除压缩器/牵引器。
56.在一些实施例中,本手术系统包括与将植入物支撑件插入手术部位的步骤和沿延伸器滑动套筒的步骤一起使用的适配器。在一些实施例中,所述方法包括将连接器固定到延伸器的步骤。在一些实施例中,所述方法包括将压缩器/牵引器与植入物支撑件连接的步骤。在一些实施例中,所述方法包括致动设置有压缩器/牵引器的齿条和小齿轮机构的步骤,以便于牵引或压缩的步骤。
57.在一些实施例中,本手术系统包括被提供以将组织保持在内侧
‑
外侧取向的牵开器,从而形成用于进入脊柱解剖结构的通道。在一些实施例中,牵开器包括第一构件,该第一构件包括可交替地与第一刀片和部件连接的配接表面。该部件可与压缩器/牵引器连接并配置为相对于压缩器/牵引器平移第一构件。该部件配置成使第一构件相对于压缩器/牵引器平移一个高度。在一些实施例中,高度可在约0mm至约50mm之间的范围内调节。在一些实施例中,该部件通过布置在压缩器/牵引器上的燕尾突出部与压缩器/牵引器连接。燕尾突出部有利于该部件和压缩器/牵引器之间的摩擦配合,以固定该部件和/或第一构件相对于压缩器/牵引器的位置。牵开器包括可与第二刀片连接的第二构件。第二构件可相对于第一构件移动,使得刀片可移动以间隔开脊椎附近的组织。
58.在一些实施例中,本手术系统包括稳定元件,该稳定元件被配置为与植入物支撑件一起安置并且可交替地与第一刀片或第二刀片接合。在一些实施例中,植入物支撑件包括被配置用于稳定元件的可滑动平移的杆槽。在一些实施例中,稳定元件包括可交替地与第一刀片或第二刀片接合的至少一个配接销。在一些实施例中,提供牵开器以将组织保持在内侧
‑
外侧取向,从而形成用于进入脊柱解剖结构的通道。在一些实施例中,稳定元件用于在内侧和/或外侧方向加宽通道。
59.在一些实施例中,本手术系统与外科技术一起使用以植入脊柱植入物(例如脊柱杆和固定螺钉)。在一些实施例中,经皮植入脊柱杆和固定螺钉。在一些实施例中,脊柱杆相对于螺钉头复位。在一些实施例中,本手术系统与外科技术一起使用以释放脊柱杆复位期间施加的压力。
60.在一些实施例中,本手术系统包括被配置成压缩或牵引并且恢复脊柱的弯曲的手术器械。在一些实施例中,本手术系统包括用于矫正矢状畸形和重新平衡身体的脊柱的器械和工具。在一些实施例中,本手术系统用于治疗矢状平面中脊柱的退行性畸形,例如退行性脊柱后凸。在一些实施例中,本手术系统用于治疗过度脊柱后凸、扁平腰背,包括导致身体不平衡以及身体部位之间失准的病症。在一些实施例中,本手术系统提供选定量的矫正以将选定平衡应用于脊柱并且提供对矫正量的控制和调节。在一些实施例中,本手术系统包括一系列工具和器械,其允许调配所应用的矫正类型,并且可使用后部器械来控制矫正稳定性。
61.在一些实施例中,手术系统的部件中的一个或所有是与脊柱构造物一起使用的一次性的、剥离包装的、预包装的无菌装置。手术系统的一个或所有部件可以是可重复使用的。手术系统可被配置成具有多种尺寸和配置的组件的套件。
62.在一些实施例中,本公开可以用于治疗脊椎病症,例如退行性椎间盘疾病、椎间盘突出、骨质疏松症、腰椎滑脱、狭窄、脊柱侧凸、脊柱后凸和其它曲度异常、肿瘤和骨折。在一些实施例中,本公开可与其它骨骼和骨相关应用,包括与诊断和疗法相关联的那些应用一起使用。在一些实施例中,所公开的手术系统和方法可替代地用于患者处于俯卧位或仰卧位的外科手术治疗中,和/或采用各种外科方法到达脊柱,包括后部和/或后部中线和其它身体区域。本公开还可替代地与用于治疗脊柱的腰部、颈部、胸部、骶骨和骨盆区域的手术一起使用。本公开的系统和方法还可用于动物、骨模型和其它非生物基质,例如在训练、测试和演示中。
63.通过参考以下结合形成本公开的一部分的附图的实施例的详细描述,可更容易地理解本公开。应当理解,本技术不限于本文描述和/或展示的特定装置、方法、条件或参数,并且本文使用的术语仅出于通过实例描述特定实施例的目的,而不是为了限制。在一些实施例中,如说明书且包含所附权利要求中所使用,单数形式“一个(a)”、“一个(an)”和“所述”包含复数,并且除非语境明确规定,否则对特定数值的引用包含至少所述特定值。范围在本文中可被表达为从“约”或“大约”一个特定值和/或到“约”或“大约”另一个特定值。在表达此范围时,另一个实施方案包含从一个特定值和/或到另一个特定值。类似地,在通过使用先行词“约”将值表达为近似值时,应理解,所述特定值形成另一个实施方案。还应理解,所有空间参考(例如水平、竖直、顶部、上部、下部、底部、左和右)仅用于说明目的,并且可在本公开的范围内变化。例如,参考“上部”和“下部”是相对的,并且仅用于上下文中,并且不必为“较高”和“较低”。
64.如说明书且包含所附权利要求书中所使用,疾病或病况的“治疗(treating/treatment)”是指执行一手术,所述手术可包含向患者(正常的或非正常的人类或其它哺乳动物)给药一种或多种药物、使用可植入装置和/或使用治疗疾病的器械(例如用于去除凸出部分或患疝气椎间盘和/或骨刺的显微椎间盘切除术器械),以致力于缓解疾病或病况的病征或症状。缓解可能在出现疾病或病况的病征或症状之前以及出现之后发生。因此,治疗包含防止疾病或不良病况(例如,在可能易患所述疾病但尚未诊断患有所述疾病的患者中防止所述疾病发生)。此外,治疗不需要完全缓解病征或症状,不需要治愈,并且特别包含对患者仅有边际效应的手术。治疗可包含抑制疾病,例如遏制其发展,或缓解疾病,例如造成病退。例如,治疗可包含减少急性或慢性炎症;缓解疼痛,缓和并诱导新韧带、骨和其它组织
的再生长;作为手术的辅助手段;和/或任何修复手术。此外,如在本说明书中所使用并且包括所附权利要求书,术语“组织”包括软组织、韧带、肌腱、软骨和/或骨,除非另有特别说明。
65.以下讨论包含根据本公开原理的手术系统和使用所述手术系统的相关方法的描述。公开了替代实施例。参考在附图中示出的本公开的示例性实施例。转到图1
‑
10,说明手术系统10的部件。
66.手术系统10的部件可以由适合于医疗应用的生物可接受的材料制造,所述材料包含金属、合成聚合物、陶瓷和骨材料和/或其复合材料。例如,手术系统10的部件(单独地或共同地)可由如以下的材料制成:不锈钢合金、商业纯钛、钛合金、5级钛、超弹性钛合金、钴铬合金、超弹性金属合金(例如镍钛诺、超弹性塑料金属)、陶瓷及其复合材料(如磷酸钙(例如skelite
tm
))、热塑性塑料(如包括聚醚醚酮(peek)、聚醚酮酮(pekk)和聚醚酮(pek)的聚芳醚酮(paek))、碳peek复合材料、peek
‑
baso4聚合橡胶、聚对苯二甲酸乙二醇酯(pet)、织物、硅酮、聚氨酯、硅酮
‑
聚氨酯共聚物、聚合物橡胶、聚烯烃橡胶、水凝胶、半刚性和刚性材料、弹性体、橡胶、热塑性弹性体、热固性弹性体、弹性体复合材料、包括聚苯、聚酰胺、聚酰亚胺、聚醚酰亚胺、聚乙烯、环氧树脂的刚性聚合物、包括自体移植物、同种异体移植物、异种移植物或转基因皮质骨和/或皮质松质骨以及组织生长或分化因子的骨材料、部分可再吸收的材料(例如金属和钙基陶瓷的复合材料、聚醚醚酮和钙基陶瓷的复合材料、聚醚醚酮与可再吸收聚合物的复合材料)、完全可再吸收的材料(例如钙基陶瓷,如磷酸钙、三磷酸钙(tcp)、羟基磷灰石(ha)
‑
tcp、硫酸钙)或其它可再吸收的聚合物(例如聚腺苷酸、聚乙交酯、聚酪氨酸碳酸盐、聚丙交酯及其组合)。
67.手术系统10的各个部件可具有包括上述材料的复合材料,以实现各种期望特性,如强度、刚性、弹性、顺应性、生物力学性能、耐久性和射线可透性或成像偏好。手术系统10的部件单独地或共同地也可由异质材料(如上述材料中两种或更多种的组合)制成。如本文所述,手术系统10的部件可整体形成,整体连接或包括紧固元件和/或器械。
68.例如,手术系统10与微创手术一起使用,包括经皮技术、微开放和开放外科技术,以在患者体内的外科手术部位递送和引入脊柱构造物的器械和/或部件,例如脊柱的一部分。在一些实施例中,手术系统10的部件中的一个或多个被配置成与附接于椎骨的脊柱构造物接合,以操纵组织和/或矫正脊柱疾病(例如矢状畸形),如本文所述。在一些实施例中,手术系统10可与外科手术(例如椎体切除术、椎间盘切除术和/或骨折/创伤治疗)一起使用,并且可包括使用植入物来恢复椎骨的机械支撑功能的融合和/或固定。
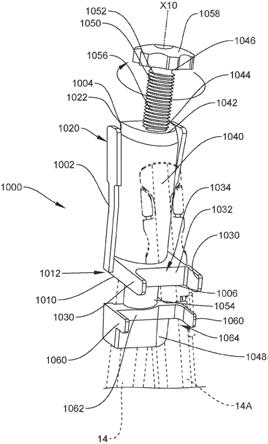
69.手术系统10包括手术器械,例如植入物支撑件14和与植入物支撑件14类似的植入物支撑件14a,如本文所述。植入物支撑件14、14a可与脊柱植入物连接,例如,骨紧固件16。如图1所示,骨紧固件16包括接收器18和螺钉轴20。在使用紧固件16时,螺钉轴20与患者组织一起固定。每个接收器18可与植入物支撑件14、14a中的一个连接以可释放地接合手术器械,例如压缩器/牵引器300以牵引和/或压缩组织。
70.每个接收器18包括一对间隔开的臂30、32(图3),这些臂限定了植入腔,所述植入腔被配置成用于安置脊柱构建物的部件,例如脊柱杆450(例如图24)。每个接收器18包括具有螺纹形式的内表面,如图2和3所示。螺钉轴16包括被配置成穿透组织(例如骨)的轴20。
71.臂30包括或者连接至易折断地连接到臂30的脱离凸片34,如图2所示,使得相对于臂30对凸片34的操纵可以在预定的力和/或扭矩极限下使凸片34断裂并与臂30分离。臂32
类似地包括或者连接至易折断地连接到臂32的脱离凸片36,使得相对于臂32对凸片36的操纵可以在预定的力和/或扭矩极限下使凸片36断裂并与臂32分离。在一些实施例中,例如,随着将力和/或扭矩施加到凸片34、36并且阻力增加,接近预定扭矩和力极限,允许凸片34、36从臂30、32断裂。
72.在一些实施例中,每个植入物支撑件14、14a包括可与凸片34、36和/或骨紧固件16连接的延伸器凸片40、42。每个延伸器凸片40、42在近侧端部44和远侧端部46之间延伸。远侧端部46被配置成用于可滑动地安置骨紧固件16的一部分,例如,凸片34、36。在一些实施例中,凸片34、36被配置成将延伸器凸片40、42可释放地固定到骨紧固件16,用于将延伸器凸片40、42连接到植入物支撑件14,如本文所述。
73.在一些实施例中,延伸器帽52设置有延伸器凸片40、42。帽60被配置为对齐延伸器凸片40、42以阻止和/或防止延伸器凸片40、42张开。帽60被配置为便于定位手术器械的引导件。
74.植入物支撑件14包括连接器80以促进植入物支撑件14与延伸器凸片40、42的接合。连接器80包括细长构件,例如套筒62、64,如图4和5所示。套筒62包括表面66并且套筒64包括表面68。套筒62、64被配置成用于在延伸器凸片40、42上平移。套筒62、64以间隔开的关系设置并且限定狭槽70,该狭槽被配置成用于安置植入物(例如脊柱杆450)(例如图24)。
75.连接器80包含壁84。如图6所示,壁84包含限定空腔的内表面86,例如口袋表面88。口袋表面88被配置成用于安置延伸器凸片40、42的近端44,也如图6所示。口袋表面88被配置为抵抗和/或防止连接器80从延伸器凸片40、42脱离。在各种实施例中,连接器80包括锁,例如配置用于在锁或锁定方向和非锁定方向之间布置的可按压按钮90。在锁定方向上,按钮90可释放地将植入物支撑件14与延伸器凸片40、42固定在一起。在非锁定方向上,植入物支撑件14可相对于延伸器凸片40、42平移以与骨紧固件16接合和脱离。按钮90可以被弹簧偏置到锁定位置,例如通过由按钮90限定的突出部92在锁定方向偏置成与凹槽56接合以将植入物支撑件14与延伸器凸片40、42可释放地固定在一起。在一些实施例中,连接器80包括一个或多个按钮90。
76.植入物支撑件14包括从连接器80延伸的适配器100,如图4和5所示。适配器100包括沿着套筒64延伸的延伸部102。延伸部102可枢转地连接到套筒64,使得延伸部102可以旋转和/或成角度,如本文所述。在一些实施例中,套筒64包括止动元件,例如配置成抵抗和/或防止延伸部102相对于套筒64旋转的加强肋65。在一些实施例中,加强元件提供植入物支撑件14的增加的刚度。在一些实施例中,加强元件抵抗和/或防止延伸部102向内旋转。在一些实施例中,加强元件提供倒角几何形状以促进延伸部102的稳定性。
77.适配器100包括与延伸部102可旋转地附接的延伸部104,使得延伸部104可相对于连接器80旋转。延伸部104横向于延伸部102延伸。在一些实施例中,延伸部104可相对于延伸部102不同地取向,例如垂直的、成角度的和/或偏移。
78.延伸部104通过销铰链106与延伸部102连接。销铰链106有利于延伸部104相对于延伸部102和/或骨紧固件16的旋转。延伸部104可旋转通过约0度至约 /
‑
90度的角度范围。在一些实施例中,延伸部104包括锁108,该锁被配置为在相对于延伸部102和连接器80的选定方向上固定延伸部104。锁108可安置在锁定方向和非锁定方向,以促进延伸部104的选择性取向。如本文所述,延伸部104的旋转通过提供植入物支撑件14与压缩器/牵引器300对准
的操作来促进植入物支撑件14与压缩器/牵引器300的连接。
79.在各种实施例中,延伸部104包括可与压缩器/牵引器300接合以将植入物支撑件14与压缩器/牵引器300可释放地固定的突出部120。突出部120包括限定横向凹槽126的表面122,如图7所示。突出部120包括锁定件,例如弹簧偏置球130,其被配置用于在凹槽126内在锁定方向和非锁定方向之间平移(并且可能也用于一些旋转)。设置有凹槽126的弹簧128将球130偏向锁定方向。
80.突出部120可与压缩器/牵引器300连接。压缩器/牵引器300包括一部分,例如配置为与突出部120接合的可按压按钮140。按钮140包括壁142,当压缩器/牵开器300连接到植入物支撑件14时,该壁围绕突出部120周向延伸。壁142包括端面144,其可接合球130以在锁定取向和非锁定取向之间平移球130。
81.压缩器/牵引器300包括纵向元件,例如齿条302,如图8所示。齿条302在端部304和限定纵向轴线a1的端部306之间延伸。齿条302被配置为将相邻的植入物支撑件14、14a彼此连接,如图1所示。齿条302包括具有多个齿(例如可与臂310接合的花键308)的外表面,如本文所述。齿条302包括从端部304延伸的臂312。在一些实施例中,臂312与齿条302附接,例如用夹具、钩、粘合剂和/或凸缘。
82.臂312包括限定开口314的表面,该开口被配置用于安置突出部120以将压缩器/牵引器300连接到植入物支撑件。臂310可相对于臂312沿轴线a1轴向平移。臂310包括限定开口318的表面,该开口被配置用于安置突出部120以将压缩器/牵引器300连接到植入物支撑件14a。
83.压缩器/牵引器300包括棘轮,所述棘轮包括可以双向的和/或双向棘轮配置接合的花键308和臂310。臂310包括闩锁320,其可选择性地与花键308接合。在各个实施例中,闩锁320包括可与花键308接合的小齿轮或棘爪(未详细示出)。
84.闩锁320可相对于臂310枢转以选择性地布置在一个或多个位置。在各种实施例中,位置包括牵引位置、中间位置和压缩位置。在牵引位置,闩锁320接合齿条302以允许臂310相对于臂312/齿条302在图19中箭头b所示的方向上的轴向和/或增量平移。因此,可以执行与植入物支撑件14、14a连接的椎骨组织的牵引。闩锁320可相对于臂310枢转,以便置于中间位置(未示出)。在中间位置,闩锁320从齿条302脱离,以允许臂310相对于臂312/齿条302的自由轴向平移。
85.在一些实施例中,手术系统10包括一个或多个对准引导件350,如图9和10所示。每个引导件350被配置为与一个或多个骨紧固件16的接收器18一起安置以相对于接收器18定向植入物支撑件14、14a并且便于识别、定位和/或接合植入物支撑件14、14a与接收器18。
86.闩锁320可相对于臂310枢转以置于压缩位置,如图26所示。在压缩位置,闩锁320接合齿条302以允许臂310相对于臂312/齿条302沿箭头c所示方向轴向和/或增量平移。因此,可以执行与植入物支撑件14、14a连接的椎骨组织的压缩。在一些实施例中,可旋转键330包括可与花键308接合的齿轮表面,以轴向和/或递增地平移齿条302,以便于牵引和/或压缩,如本文所述。
87.在一些实施例中,如本文所述,通过操纵植入物支撑件14、14a,植入物支撑件14、14a的连接有助于矫正椎骨的椎骨角,例如,以实现选定的脊柱前凸和/或后凸。在一些实施例中,如本文所述,植入物支撑件14、14a与压缩器/牵引器300连接以在牵引和/或压缩期间
保持椎骨的校正椎骨角度。
88.在组装、操作和使用中,类似于本文所述的系统和方法的手术系统10与外科手术一起使用,用于治疗患者的脊柱(包括椎骨v),如图11
‑
30所示。手术系统10也可与外科手术一起使用,例如椎间盘切除术、椎板切除术、融合术、椎板切开术、椎板切除术、神经根回缩术、孔切开术、面部切除术、减压术、脊柱核或椎间盘置换术以及骨移植术和包括板、杆和骨接合紧固件的植入式假体。
89.手术系统10与用于治疗脊柱的受影响部分和身体内相邻区域的相关病症或损伤的手术一起使用。例如,椎骨v包括椎骨水平v1、椎骨水平v2和椎骨水平v3,如图12所示。患病和/或受损的椎骨和椎间盘设置在椎骨v1和v3之间的椎骨v2处。在一些实施例中,手术系统10的部件被配置成用于插入椎骨空间以隔开关节表面,提供支撑并最大化椎骨v的稳定性。
90.在使用中,为了治疗椎骨v的受影响部分,医疗从业者以任何适当的方式(例如通过切开和收回组织)获得进入包括椎骨v的手术部位的通路,如图11所示。在一些实施例中,手术系统10可用于任何现有的外科方法或技术,包括开放手术、微型开放手术、微创手术和经皮手术植入,由此椎骨v通过小切口或套筒进入,所述小切口或套筒为所述区域提供受保护的通路。
91.在患者p体内制作切口i,并且切割器械(未示出)形成用于植入手术系统10的部件的外科路径,如图12
‑
14所示。制备器械(未展示)可用于制备椎骨v的组织表面,以及用于抽吸和灌注外科手术区域。
92.在选定的椎骨v1和v3中制有用于容纳骨紧固件16的引孔等。驱动器(未示出)在外科手术部位处邻近椎骨v设置,并且被操纵以驱动、扭转、插入或以其它方式连接骨紧固件16与椎骨v1和v3。骨紧固件16沿着椎骨v的侧边l与椎骨v接合,如图12所示。延伸器40、42与骨紧固件16接合。
93.如本文所述,植入物支撑件14、14a与延伸器40、42连接。压缩器/牵引器300经由突出部120安装有适配器100以与其固定,如本文所述。连接器80捕获延伸器40、42,如图15所示并在此描述。压缩器/牵引器300与植入物支撑件14、14a连接,以允许与延伸器40、42连接的椎骨v的牵引和/或压缩。
94.引导件350与连接器80一起布置(例如,在其内部)。引导件350被平移成与骨紧固件16接合,直到与接收器18完全就位。引导件350被配置为定向植入物支撑件14、14a并且便于识别、定位和/或将植入物支撑件14、14a与接收器18接合,如图15
‑
17所示。
95.闩锁320可相对于臂310枢转以置于牵引位置,如图18
‑
20所示。在牵引位置,闩锁320接合齿条302以允许臂310相对于臂312/齿条302在图16中箭头b所示的方向上的轴向和/或增量平移,以牵拉与植入物支撑件14、14a连接的椎骨组织。施加在骨紧固件16上的牵引力将允许打开椎间盘的孔和后壁。闩锁320可以在手术过程中的任何时间释放或重新调整。闩锁320可相对于臂310枢转,以便置于中间位置(未示出)。在中间位置,闩锁320允许臂310相对于臂312/齿条302的自由轴向平移。
96.在一些实施例中,例如卡尺400的测量装置用于确定脊柱杆450的长度,如图21所示。卡尺400与植入物支撑件14、14a接合,从而可以确定骨紧固件16之间的距离。确定距离提供了用于与骨紧固件16连接的杆450的长度。在一些实施例中,牵开器460,如图23所示,
与组织一起布置以形成手术通道以促进脊柱植入物例如椎间植入物的插入。
97.在一些实施例中,杆插入器500与脊柱杆450接合,如图24所示。杆插入器500引导和/或导引脊柱杆450穿过狭槽70并进入接收器18。在一些实施例中,利用经皮内窥镜腰椎间盘切除术。
98.在一些实施例中,使用驱动器550来将固定螺钉552与骨紧固件16接合,如图24和25所示。驱动器550引导和/或导引固定螺钉552通过每个植入物支撑件14、14a与接收器18接合。固定螺钉552与接收器18接合以固定脊柱杆450。在一些实施例中,如果需要分段压缩,则固定螺钉552被松开并且闩锁320可相对于臂310枢转以设置在压缩位置,如图26
‑
28a中所示。在压缩位置,闩锁320接合齿条302以允许臂310相对于臂312/齿条302沿箭头c所示方向轴向和/或增量平移,以压缩与植入物支撑件14、14a连接的椎骨组织。在一些实施例中,可旋转键330包括可与花键308接合的齿轮表面,以轴向和/或递增地平移齿条302,以便于牵引和/或压缩,如本文所述。在一些实施例中,适配器100枢转地连接到连接器80,使得连接器80可以旋转和/或成角度,如图26
‑
28a所示,便于压缩。
99.在一些实施例中,凸片钩反扭矩手柄600和凸片钩反扭矩套筒602与植入物支撑件14、14a接合,如图28和28a所示。手柄600和套筒602配置成提供额外的杠杆作用,以有助于在选定的扭矩极限处去除和/或分离固定螺钉552的易碎或断开部分。在一些实施例中,反扭矩套筒602被配置为加强连接器80的连接并在固定螺钉552折断期间保护断裂凸片34、36。在一些实施例中,连接器80被布置成在预弯曲杆的半径的中心处接触。在一些实施例中,断裂手柄604与驱动器500一起安置,并被操纵以施加力用于拧紧固定螺钉552并用于断开扭矩极限。压缩器/牵引器300和植入物支撑件14、14a被移除,如图29和30所示。椎骨v与选择的取向对齐,用于矢状、冠状和/或轴向矫正。
100.在完成程序后,如本文所述,移除手术系统10的手术器械、组件和非植入部件,并且闭合(一个或多个)切口。手术系统10的部件中的一个或多个可由射线可透过的材料(如聚合物)制成。可以包含放射性标记以用于在x射线、荧光透视、ct或其它成像技术下进行标识。在一些实施例中,外科手术导览、显微外科手术和图像引导技术的使用可以用于借助于外科手术系统10来接近、查看和修复脊椎退化或损伤。在一些实施例中,手术系统10可以包含与单个椎骨层或多个椎骨层一起使用的一个或多个板片、连接器和/或骨紧固件。
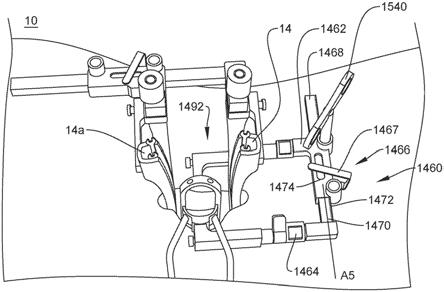
101.在一个实施例中,与本文所述的部件和方法类似的手术系统10包括:牵开器1460,如图31
‑
36所示,压缩器/牵引器300和植入物支撑件14、14a。牵开器1460可以以任何方式类似于本文所述的牵开器460。牵开器1460包括第一构件,例如第一臂1462,和第二构件,例如第二臂1464。臂1462、1464通过纵向元件连接,例如棘轮1466,如图31所示。
102.棘轮1466在端部1468和端部1470之间延伸,限定纵向轴线a5。棘轮1466被配置为将臂1462、1464彼此连接并且相对于臂1462平移臂1464。棘轮1466包括具有多个齿的外表面,例如花键1472,其可与棘轮1466的部分1474接合,如本文所述。棘轮1466包括闩锁1467,其可相对于部分1474移动,例如可枢转,以将臂1464相对于臂1462设置和/或固定在一个或多个位置。
103.在各种实施例中,臂1462、1464之一固定地连接到棘轮1466。在图31的实施例中,臂1464是。固定臂可以从端部1468、1470处的或它们之间的任何地方延伸。如图31所示,臂1464从棘轮1466的端部1470延伸。臂1464限定了轴线x3,如图33所示。臂1464包括配接表
面,例如配置用于与刀片1592连接的开口(未示出),如本文所述。
104.如本文所述,开口或臂1464便于刀片1592围绕轴线x3旋转。刀片1592包括被配置为与组织接合的内表面和外表面。在一些实施例中,刀片1592的全部或仅一部分可具有各种截面构造,例如,弓形、圆柱形、椭圆形、矩形、多边形、波形、不规则、均匀、不均匀、一致、可变和/或u形。刀片1592可在多个维度内移动以选择性地间隔组织。如上所述,闩锁1467是可移动的或以其他方式可枢转的,以将臂1464相对于臂1462设置和/或固定在一个或多个位置,从而使刀片1592相对于至少一个自由度固定在选定的方向上。
105.臂1462从棘轮1466的端部1468或在端部1468和端部1470之间延伸。臂1462限定了轴线x1,如图33所示。臂1462包括配接表面,例如开口1480,如图36所示。如本文所述,开口1480被配置为可与部件例如高度控制器1490和/或刀片1492连接。高度控制器1490被配置为调节牵开器1460和/或刀片1592相对于压缩器/牵开器300的高度h,如图34和图35所示。
106.顺便说一下,指示尺寸或方向的方式不限制本发明的范围,例如限制任何部件可以被布置、连接或移动的方向。例如,这里提到的高度控制器和高度不限制该部件和尺寸在手术中严格垂直定向。
107.高度控制器1490在限定轴x2的第一端1500和第二端1502之间延伸,如图32所示。在各种实施例中,高度控制器1490包括限定纵向凹槽1506的纵向轨道1504。凹槽1506在端部1500、1502之间沿轴线x2延伸。在一些实施例中,凹槽1506可以相对于轴线x2以交替的定向安置,如例如,横向、垂直和/或其它角度定向,如例如,锐角或钝角、同轴和/或可以偏移或交错。在一些实施例中,高度控制器1490包括一个或多个轨道1504。
108.凹槽1506被配置用于布置元件,例如从压缩器/牵引器300延伸的突出部1508,如图33和图36所示。突出部1508在凹槽1506内可滑动地平移以促进高度控制器1490沿压缩器/牵引器300的平移。高度控制器1490可选择性地固定在相对于压缩器/牵引器300的位置。在一些实施例中,高度控制器1490经由凹槽1506的表面与突出部1508的构造(例如锥形构造)之间的摩擦配合接合相对于压缩器/牵引器300可选择性地固定,例如燕尾构造。在考虑的实施例中,当突出部在凹槽内平移时,界面——即凹槽1506和突出部1508——被配置为提供触觉反馈,例如点击感。
109.如上所述,高度控制器1490沿压缩器/牵引器300的平移有利于调节牵开器1460和/或刀片1592相对于压缩器/牵引器300的高度h。在一些实施例中,高度h可相对于压缩器/牵引器300在约0mm至约50mm的范围内调节。
110.在各种实施例中,端部1502包括从高度控制器1490的表面1522延伸的突出部1520,如图32所示。突出部1520垂直于轴线x2延伸。在一些实施例中,突出部1520可以相对于轴线x2以交替的定向延伸,如例如,横向、垂直和/或其它角度定向,如例如,锐角或钝角、同轴和/或可以偏移或交错。突出部1520配合地接合臂1462的开口1480。在各种实施例中,突出部1520与开口1480可释放地接合。在一些实施例中,突出部1520能够以搭扣配合连接与开口1480接合。突出部1520与开口1480的接合使高度控制器1490横向于轴线x1定向,如图35所示。在一些实施例中,高度控制器1490可以相对于轴线x1以交替的定向延伸,如例如,垂直和/或其它角度定向,如例如,锐角或钝角、同轴和/或可以偏移或交错。
111.如本文所述,刀片1492包括可与开口1480接合以促进刀片1492围绕轴线x1旋转的枢轴表面(未示出)。刀片1492和高度控制器1490可与臂1462互换。刀片1492包括被配置为
与组织接合的内表面和外表面。在一些实施例中,刀片1492的全部或仅一部分可具有各种截面构造,例如,弓形、圆柱形、椭圆形、矩形、多边形、波形、不规则、均匀、不均匀、一致、可变和/或u形。在一些实施例中,如图31所示,牵开器1460包括手柄1540,其设置有臂1462以促进刀片1492围绕轴线x1旋转。
112.在一个实施例中,手术系统10包括稳定元件1700,如图37
‑
42所示。如本文所述,稳定元件1700被配置为与植入物支撑件14、14a的狭槽70(图4和5)一起安置。稳定元件1700被配置为稳定手术系统10的一个或多个部件例如植入物支撑件14、14a、刀片1492或刀片1592和/或牵开器1460的部件相对于患者身体的横向运动。
113.稳定元件1700包括在第一端1704和第二端1706之间延伸的主体1702。主体1702包括用于与刀片1492和/或刀片1592的内表面配合接合的构造。在一些实施例中,主体1702的全部或仅一部分可具有各种截面构造,例如,弓形、圆柱形、椭圆形、矩形、多边形、波形、不规则、均匀、不均匀、一致、可变和/或u形。
114.在各种实施例中,主体1702包括表面1710。配接销1708从表面1710延伸。销1708被配置为与设置有刀片1492和/或刀片1592的开口1800(图33)接合。在一些实施例中,主体1702包括至少一个配接销1708。
115.端部1704连接到从其延伸的凸缘1720。凸缘1720被配置为与植入物支撑件14和/或植入物支撑件14a的狭槽70一起安置。端部1706连接到从其延伸的凸缘1722。凸缘1722被配置为与植入物支撑件14和/或植入物支撑件14a的狭槽70一起安置。凸缘1720、1722被配置为在槽70内可滑动平移以促进稳定元件1700的定位。
116.例如,在一些实施例中,提供牵开器1460以将组织保持在内侧
‑
外侧取向,从而形成用于进入脊柱解剖结构的通道c(图41和42)。在一些实施例中,提供牵开器1460以在横向轴和背轴上以多个刀片角度保持组织。稳定元件1700用于在内侧和/或外侧方向上隔开组织和/或开放通道c。例如,如本文所述,稳定元件1700定位成使得主体1702以与刀片1592配合的构造布置。凸缘1722与植入物支撑件14的狭槽70一起布置。凸缘1720与植入物支撑件14a的狭槽70一起布置。在该方向上,稳定元件1700使刀片1592和植入物支撑件14、14a向中间移动,例如朝向患者身体的中线,如图40中的箭头m所示。刀片1592和植入物支撑件14、14a在中间方向上的运动朝向患者身体的中线打开通道c。
117.在一些实施例中,稳定元件1700用于沿横向将组织和/或开放通道c隔开。例如,稳定元件1700定位成使得主体1702以与刀片1492配合的构型设置,如图41和42所示。凸缘1720与植入物支撑件14的狭槽70一起布置。凸缘1722与植入物支撑件14a的狭槽70一起布置。在该方向上,稳定元件1700使刀片1492和植入物支撑件14、14a横向移动,例如远离中线并朝向患者身体的外侧,如图42中的箭头l所示。刀片1492和植入物支撑件14、14a在横向方向上的移动朝向患者身体的横向侧打开通道c。
118.在一些实施例中,手术系统10包括一个或多个替代手术器械,每个手术器械被配置成用于与脊柱构造物的快速释放配置配合接合,如本文所述。这种配置有利于脊柱构造物与替代手术器械的可互换性。在一些实施例中,手术系统10包括一个或多个替代手术器械,例如插入器、延伸器、复位器、扩张器、牵引器、刀片、牵开器、夹具、镊子、升降机和钻头,它们可以被交替地设定大小和尺寸,并且被布置成套件。
119.在一些实施例中,手术系统10包含药剂,其可以安置、装填、涂布或层叠在手术系
统10的部件和/或表面内、上或周围。在一些实施例中,所述药剂可包括骨生长促进材料,例如骨移植物,以增强手术系统10的部件和/或表面与椎骨的固定。在一些实施例中,所述药剂可包括一种或多种治疗剂和/或药理学药剂,用于释放(包括持续释放)以治疗例如疼痛、炎症和退化。
120.应理解,可对本文公开的实施例进行各种修改。因此,以上描述不应被解释为限制性的,而仅仅是作为各种实施例的范例。本领域的技术人员可在其所附权利要求的范围和精神范围内设想其它修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。