1.本公开一般地涉及用于治疗脊柱疾病的医疗装置,并且更具体地涉及用于矫正脊柱疾病的手术系统和方法。
背景技术:
2.例如退变性椎间盘疾病、椎间盘突出症、骨质疏松症、脊椎滑脱症、狭窄症、脊柱侧凸症、脊柱后凸症和其它曲度异常、肿瘤以及骨折的脊椎病症可能起因于包含由损伤和老化造成的创伤、疾病和退变性病况的因素。脊柱病症通常导致包含疼痛、神经损伤以及部分或完全丧失活动性的症状。
3.非手术治疗(如药物治疗、康复治疗和运动)可以是有效的,但是可无法缓解与这些疾病相关联的症状。这些脊柱病症的手术治疗包括矫正、韧带整复术、椎体切除术、椎间盘切除术、椎板切除术、融合术、固定术和植入式假体。用于椎骨的定位和对准的矫正治疗可采用脊柱植入物,这些脊柱植入物包括脊柱构造物和椎体间装置,用于稳定脊柱的治疗区段。在一些情况下,脊柱植入物可用手术器械进行操纵以压缩和牵引椎骨。本公开描述优于这些先前技术的改进。
技术实现要素:
4.在一个实施例中,提供了一种手术压缩器械。该手术压缩器械包括配置成沿第一植入物支撑件纵向布置的构件,用于将第一植入物支撑件与第二植入物支撑件可枢转地连接。第一植入物支撑件可与具有固定有椎骨组织的第一轴的第一紧固件的第一接收器接合,并且第二植入物支撑件可与具有固定有椎骨组织的第二轴的第二紧固件的第二接收器接合。一部件可相对于构件移动并可与植入物支撑件接合,使得第二植入物支撑件相对于第一植入物支撑件移动以压缩椎骨组织。在一些实施例中,公开了手术系统、构造物、植入物和方法。
5.在一个实施例中,手术压缩器械包括枢轴体,该枢轴体附接到第一植入物支撑件并沿其纵向延伸并且包括配置成用于布置第二植入物支撑件的接收器。第一植入物支撑件可与具有固定有椎骨组织的轴的紧固件的接收器接合,并且第二植入物支撑件可与具有固定有椎骨组织的轴的紧固件的接收器接合。手术压缩器械包括滑块和致动器,该致动器与滑块连接以相对于枢轴体平移滑块,使得滑块可与第二植入物支撑件接合,以使第二植入物支撑件相对于第一植入物支撑件移动以至压缩椎体组织。
6.在一个实施例中,提供了一种手术系统。该手术系统包括具有可与椎骨组织固定的轴的第一紧固件。第一植入物支撑件可与第一紧固件的接收器接合。第二紧固件具有可与椎骨组织固定的轴。第二植入物支撑件可与第二紧固件的接收器接合。一构件沿第一植入物支撑件纵向布置以可枢转地连接植入物支撑件。一部分可相对于构件移动并可与第二植入物支撑件接合,使得第二植入物支撑件相对于第一植入物支撑件移动以压缩椎骨组织。
附图说明
7.本公开根据伴随以下附图的具体描述将变得更容易地显而易见,在附图中:
8.图1是根据本公开的原理的手术系统的一个实施例的部件的透视图;
9.图2是根据本公开的原理的手术系统的一个实施例的部件的分开透视图;
10.图3是根据本公开的原理的手术系统的一个实施例的部件的透视图;
11.图4是根据本公开的原理的手术系统的一个实施例的部件的透视图;
12.图5是根据本公开的原理的手术系统的一个实施例的部件的分离透视图;
13.图6是根据本公开的原理的手术系统的一个实施例的部件的透视图;
14.图7是由用户操纵的根据本发明原理的手术系统的一个实施例的部件的透视图;
15.图8是根据本公开的原理的手术系统的一个实施例的部件的分离透视图,部分为幻影;
16.图9是根据本公开的原理的手术系统的一个实施例的部件的透视图;
17.图10是图9中所展示的部件的细节图;
18.图11为根据本公开的原理的手术系统的一个实施例的部件的透视图;
19.图12是图11中所展示的部件的细节图;
20.图13是根据本公开的原理的手术系统的一个实施例的部件的透视图,部分为幻影;
21.图14是根据本公开的原理的手术系统的一个实施例的部件的透视图;
22.图15是图14中所展示的部件的细节图;和
23.图16是设置有椎骨的根据本公开原理的所述系统的一个实施例的部件的侧视图。
具体实施方式
24.所公开的系统和相关使用方法的示例性实施例在用于治疗肌肉骨骼疾病的医疗装置方面进行了讨论,并且更具体地,在用于矫正脊柱疾病的手术系统和方法方面进行了讨论。在一些实施例中,本手术系统包括手术器械,所述手术器械允许椎骨操纵以治疗如本文所述的脊柱疾病,用于管理脊柱前凸和/或脊柱后凸恢复。在一些实施例中,手术器械允许椎骨组织的平行牵引和/或压缩。
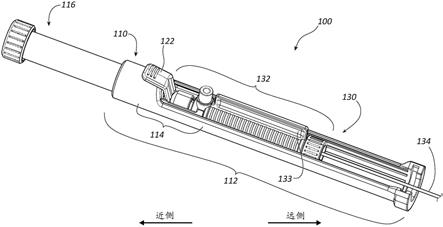
25.在一些实施例中,本手术系统包括创伤器械。在一些实施例中,本手术系统与矫正复杂脊柱畸形的方法一起使用。在一些实施例中,本手术系统与治疗退行性脊柱疾病的方法一起使用和/或与经椎间孔腰椎椎体间融合术一起使用。在一些实施例中,本手术系统被配置成与矢状调节螺钉(sas)、固定轴螺钉(fas)和/或多轴螺钉(mas)一起使用。在一些实施例中,本手术系统包含用于治疗退行性脊柱疾病的单个牵引器,例如,用于沿椎骨的被取向成用于减压和/或椎体间笼插入的侧面处理。
26.在一些实施例中,本手术系统包括与包括退行性腰椎融合术的手术方法一起使用的手术器械。在一些实施例中,本手术系统包括与手术方法一起使用的手术器械,该手术方法包括用mas螺钉进行分段后部稳定的步骤。在一些实施例中,本手术系统包括手术方法,其包括椎间融合术、后路腰椎椎间融合术(plif)、使用微创手术入路或经皮入路的经椎间孔椎间融合术(tlif)。在一些实施例中,本手术系统包括骨螺钉延伸器、组织牵开器和牵引器/压缩器系统。在一些实施例中,本手术系统包括分段牵引以促进减压,包括最终构造压
缩。在一些实施例中,本手术系统包括透放射性组织牵开器刀片。
27.在一些实施例中,本手术系统包括与手术方法一起使用的手术器械,该手术方法包括以下步骤:用mas螺钉连接延伸器,诸如,例如植入物支撑件;将套管与植入物支撑件和骨螺钉连接起来;和使用通用螺丝刀利用pak针、导丝或荧光检查进行骨螺钉的经皮植入。在一些实施例中,本手术系统包括基于螺钉的分段牵引。
28.在一些实施例中,本手术系统包括压缩器械。在一些实施例中,压缩器械包括沿第一植入物支撑件纵向设置的构件,用于与第二植入物支撑件可枢转地连接。在一些实施例中,压缩器械包括滑块,该滑块可相对于构件移动并可与植入物支撑件接合,使得第二植入物支撑件相对于第一植入物支撑件移动以压缩椎骨组织。在一些实施例中,压缩器械包括连接按钮,其被配置为防止压缩器械相对于植入物支撑件倒退。在一些实施例中,压缩器械被配置用于一步式顶部加载。
29.在一些实施例中,压缩器械包括致动器,诸如,例如用于逐渐激活滑块的螺纹按钮。在一些实施例中,压缩器械包括与预弯曲杆相容的交叉点。在一些实施例中,滑块被配置为驱动椎骨的压缩。在一些实施例中,压缩器械与包括以下步骤的方法一起使用:从植入物支撑件移除套筒;用第一骨螺钉接收器降低脊柱杆;将固定螺钉与骨螺钉接收器固定以将脊柱杆固定到位并折断固定螺钉的折断部分;和将第二固定螺钉与脊柱杆的第二端和第二骨螺钉接收器接合。在一些实施例中,骨螺钉接收器被压缩分开选定的距离。在一些实施例中,距离范围从约50mm到约19mm。在一些实施例中,骨螺钉的轴以相对角度被压缩。在一些实施例中,角度在约27度至约8度的范围内。
30.在一些实施例中,本手术系统包括被配置为平行地牵引选定椎骨的牵引器。在一些实施例中,牵引器包括可与植入物支撑件接合的适配器。在一些实施例中,使用多轴骨螺钉接收器来促进植入物支撑件与适配器的连接。
31.在一些实施例中,手术系统的部件中的一个或所有是与脊柱构造物一起使用的一次性的、剥离包装的、预包装的无菌装置。手术系统的一个或所有部件可以是可重复使用的。手术系统可被配置为具有多个设定大小和配置部件的套件。
32.在一些实施例中,本公开可以用于治疗脊椎病症,例如退行性椎间盘疾病、椎间盘突出、骨质疏松症、腰椎滑脱、狭窄、脊柱侧凸、脊柱后凸和其它曲度异常、肿瘤和骨折。在一些实施例中,本公开可与其它骨骼和骨相关应用,包括与诊断和疗法相关联的那些应用一起使用。在一些实施例中,所公开的手术系统和方法可替代地用于患者处于俯卧位或仰卧位的手术治疗中,和/或采用各种手术方法到达脊柱,包括后部和/或后部中线和其它身体区域。本公开还可替代地与用于治疗脊柱的腰部、颈部、胸部、骶骨和骨盆区域的手术一起使用。本公开的系统和方法还可用于动物、骨模型和其它非生物基质,例如在训练、测试和演示中。
33.可以通过参考结合附图的实施例的以下具体实施方式更容易地理解本公开,所述附图形成本公开的一部分。应当理解,本技术不限于本文描述和/或展示的特定装置、方法、条件或参数,并且本文使用的术语仅出于通过实例描述特定实施例的目的,而不是为了限制。在一些实施例中,如说明书且包含所附权利要求中所使用,单数形式“一个(a)”、“一个(an)”和“所述”包含复数,并且除非语境明确规定,否则对特定数值的引用包含至少所述特定值。范围在本文中可被表达为从“约”或“大约”一个特定值和/或到“约”或“大约”另一个
特定值。在表达此范围时,另一个实施例包含从一个特定值和/或到另一个特定值。类似地,在通过使用先行词“约”将值表达为近似值时,应理解,所述特定值形成另一个实施例。还应理解,所有空间参考(例如水平、竖直、顶部、上部、下部、底部、左和右)仅用于说明目的,并且可在本公开的范围内变化。例如,引用“上部”和“下部”是相对的并且仅在上下文中用于另一个,并且不一定是“上级”和“下级”。
34.如说明书且包含所附权利要求书中所使用,疾病或病况的“治疗(treating/treatment)”是指执行一手术,所述手术可包含向患者(正常的或非正常的人类或其它哺乳动物)给药一种或多种药物、使用可植入装置和/或使用治疗疾病的器械(例如用于去除凸出部分或患疝气椎间盘和/或骨刺的显微椎间盘切除术器械),以致力于缓解疾病或病况的病征或症状。缓解可能在出现疾病或病况的病征或症状之前以及出现之后发生。因此,治疗包含防止疾病或不良病况(例如,在可能易患所述疾病但尚未诊断患有所述疾病的患者中防止所述疾病发生)。此外,治疗不需要完全缓解病征或症状,不需要治愈,并且特别包含对患者仅有边际效应的手术。治疗可包含抑制疾病,例如遏制其发展,或缓解疾病,例如造成病退。例如,治疗可包括减少急性或慢性炎症;缓解疼痛,缓和并诱导新韧带、骨骼和其它组织的再生长;作为手术的辅助手段;和/或任何修复手术。此外,如在本说明书中所使用并且包括所附权利要求书,术语“组织”包括软组织、韧带、肌腱、软骨和/或骨,除非另有特别说明。
35.以下讨论包括手术系统和采用根据本公开原理的手术系统的相关方法的描述。公开替代实施例。参考在附图中示出的本公开的示例性实施例。转到图1
‑
4,绘示了手术系统10的部件。
36.手术系统10的部件可以由适合于医疗应用的生物可接受的材料制造,所述材料包含金属、合成聚合物、陶瓷和骨材料和/或其复合材料。例如,手术系统10的部件(单独地或共同地)可由如以下的材料制成:不锈钢合金、商业纯钛、钛合金、5级钛、超弹性钛合金、钴铬合金、超弹性金属合金(例如镍钛诺、超弹性塑料金属)、陶瓷及其复合材料(如磷酸钙(例如skelitetm))、热塑性塑料(如包括聚醚醚酮(peek)、聚醚酮酮(pekk)和聚醚酮(pek)的聚芳醚酮(paek))、碳peek复合材料、peek
‑
baso4聚合橡胶、聚对苯二甲酸乙二醇酯(pet)、织物、硅酮、聚氨酯、硅酮
‑
聚氨酯共聚物、聚合物橡胶、聚烯烃橡胶、水凝胶、半刚性和刚性材料、弹性体、橡胶、热塑性弹性体、热固性弹性体、弹性体复合材料、包括聚苯、聚酰胺、聚酰亚胺、聚醚酰亚胺、聚乙烯、环氧树脂的刚性聚合物、包括自体移植物、同种异体移植物、异种移植物或转基因皮质骨和/或皮质松质骨以及组织生长或分化因子的骨材料、部分可再吸收的材料(例如金属和钙基陶瓷的复合材料、聚醚醚酮和钙基陶瓷的复合材料、聚醚醚酮与可再吸收聚合物的复合材料)、完全可再吸收的材料(例如钙基陶瓷,如磷酸钙、三磷酸钙(tcp)、羟基磷灰石(ha)
‑
tcp、硫酸钙)或其它可再吸收的聚合物(例如聚腺苷酸、聚乙交酯、聚酪氨酸碳酸盐、聚丙交酯及其组合)。
37.手术系统10的各个部件可具有包括上述材料的复合材料,以实现各种期望特性,如强度、刚性、弹性、顺应性、生物力学性能、耐久性和射线可透性或成像偏好。手术系统10的部件单独地或共同地也可由异质材料(如上述材料中两种或更多种的组合)制成。如本文所述,手术系统10的部件可整体形成,整体连接或包括紧固元件和/或器械。
38.例如,手术系统10与微创手术一起使用,包括经皮技术、微开放和开放外科技术,
以在患者体内的外科手术部位递送和引入脊柱构造物的器械和/或部件,例如脊柱的一部分。在一些实施例中,手术系统10的部件中的一个或多个被配置成与附接于椎骨的脊柱构造物接合,以操纵组织和/或矫正脊柱疾病(例如矢状畸形),如本文所述。在一些实施例中,手术系统10可与手术(例如椎体切除术、椎间盘切除术和/或骨折/创伤治疗)一起使用,并且可包括使用植入物来恢复椎骨的机械支撑功能的融合和/或固定。
39.手术系统10包括延伸器,例如植入物支撑件14和植入物支撑件14a(图6),类似于本文所述的植入物支撑件14,以及套筒80(图3),两者都可接合单独且间隔开的骨螺钉600(图4和6)。植入物支撑件14、14a可连接到手术器械,诸如,例如牵引器250(图5和6)和/或压缩器械1000,以促进组织的操纵,如本文所述。
40.植入物支撑件14沿轴线x1延伸,如图1所示。如图2所示,植入物支撑件14包括第一延伸部20和第二延伸部22。延伸部20、22可通过平移元件的相对平移相对于彼此移动,平移元件例如设置有植入物支撑件14的滑动件26,如图2所示。操纵滑动件26以在通道28内平移,从而使延伸部20、22在打开取向和闭合的捕获取向之间移动。滑动件26沿图2中箭头a所示的方向平移,以使延伸部20、22沿箭头b所示的方向旋转和扩展到打开取向。在打开取向上,与延伸部20、22连接的销30布置在滑动件26的狭槽32的底部中。滑动件26沿图2中箭头c所示的方向平移,使延伸部20、22沿箭头d所示的方向旋转和收缩至闭合取向以捕获骨螺钉600的接收器602的壁604,如图2所示。在闭合取向上,销30布置在狭槽32的顶部中。在一些实施例中,延伸部20、22是柔性的以便于回缩。
41.植入物支撑件14与壁604连接,如本文结合图3和4所描述的,以便不阻止直接进入接收器602的植入腔(壁604和606之间)以促进植入物例如脊柱杆以及也许还有固定器件例如固定帽或固定螺丝的插入。
42.在一些实施例中,如本文所述,一个或多个植入物支撑件14是可操纵的,以在手术治疗期间提供用于小畸形操纵和椎骨操纵的反扭矩,例如以移位、拉动、扭转或对齐椎骨。
43.再次参考图3和图4,套管80可与植入物支撑件14和壁606连接。套筒80包括在第一端84和第二端86之间延伸的主体82。主体82沿植入物支撑件14延伸。端部84包括第一凸缘88和相对的第二凸缘90,其具有限定配接通道91的对应配接表面。每个表面可以包括形成在其中的配接凹槽92。配接凹槽92,或至少凸缘88、90,被配置成用于布置植入物支撑件14的近端部分,如图4所示。
44.在各种实施例中,凸缘88、90是柔性的,使得凸缘88、90卡扣配合在植入物支撑件周围14并与之接合。在布置植入物支撑件14与凸缘88、90后,套筒80被布置成捕获接收器602的壁606的构造,如图4所示。
45.端部86包括限定配接表面102的表面100。表面102被配置用于捕获壁606。在各种实施例中,表面102包括远侧突出部104,该远侧突出部配置成与接收器602的壁606的腔608(图2)接合以促进接合。
46.继续参考图4,骨螺钉600包括轴610和接收器602。接收器602在多轴配置中可相对于轴移动。如本文所述,接收器602被配置为与植入物支撑件14和套管80接合。壁604、606中的至少一个包括限定腔608(图2)的表面。如本文所述,每个腔608可用于促进与植入物支撑件14和/或套管80的连接。壁604、606包括内表面,所述内表面限定用于安置脊柱杆的u形通路612,如本文所述。接收器602的内表面包括被配置成与固定螺钉接合的螺纹形式。
47.在组装、操作和使用中,类似于本文所述的系统和方法的手术系统10与外科手术一起使用,用于治疗患者的脊柱(包括椎骨v),如图8
‑
19所示。手术系统10也可与外科手术一起使用,例如椎间盘切除术、椎板切除术、融合术、椎板切开术、椎板切除术、神经根回缩术、孔切开术、面部切除术、减压术、脊柱核或椎间盘置换术以及骨移植术和包括板、杆和骨接合紧固件的植入式假体。
48.手术系统10与用于治疗脊柱的受影响部分和身体内相邻区域的相关病症或损伤的手术一起使用。例如,椎骨v包括椎骨水平v1、椎骨水平v2和椎骨水平v3,如图19所示。患病和/或受损的椎骨和椎间盘设置在椎骨v1和v3之间的椎骨v2处。在一些实施例中,手术系统10的部件被配置成用于插入椎骨空间以隔开关节表面,提供支撑并最大化椎骨v的稳定性。
49.在使用中,为了治疗椎骨v的受影响部分,医疗从业者以任何适当的方式(如通过切开和回缩组织)进入包括椎骨v的外科手术部位。在一些实施例中,手术系统10可用于任何现有的外科方法或技术,包括开放手术、微型开放手术、微创手术和经皮手术植入,由此椎骨v通过小切口或套筒进入,所述小切口或套筒为所述区域提供受保护的通路。
50.在患者体内制作切口,并且切割器械(未示出)形成用于植入手术系统10的部件的手术路径。制备仪器(未示出)可用于制备椎骨v的组织表面,以及用于外科区域的抽吸和冲洗。
51.在选定的椎骨v1和v3中制有用于容纳骨紧固件600的引孔等。如本文所述,植入物支撑件14、14a与接收器602的壁604接合。如本文所述,套筒80与接收器602的壁606接合。如本文所述,配接凹槽88、90与植入物支撑件14接合。驱动器650在手术部位处邻近椎骨v设置,并且被操纵以驱动、扭转、插入或以其它方式连接骨螺钉600与椎骨。
52.牵引器250,如图5所示,与植入物支撑件14、14a连接,以允许牵引与骨螺钉600连接的椎骨v。牵引器250包括纵向元件,例如在端部254和端部256之间延伸的齿条252。齿条252被配置为连接相邻的植入物支撑件14、14a。齿条252包括具有多个齿(例如可与臂282接合的花键260)的外表面258,如本文所述。齿条252包括从端部254延伸的臂262。在一些实施例中,臂262与齿条252附接,例如用夹具、钩、粘合剂和/或凸缘。
53.臂262包括在端部272和端部274之间延伸的构件,例如适配器270。适配器270包括表面276和壁278,该壁限定在端部272、274之间延伸的接收器280。接收器280被配置用于安置植入物支撑件14a。适配器270包括矩形横截面构造,如图5所示。在一些实施例中,适配器270的横截面的全部或仅一部分可具有替代的横截面配置,例如弧形、闭合形、v形、w形、椭圆形、长圆形、三角形、正方形、多边形、不规则形、均匀形、不均匀形、偏移形、交错形和/或锥形。
54.齿条252包括臂282,该臂可相对于臂162轴向平移。臂262包括在端部292和端部294之间延伸的构件,例如适配器290。适配器290包括表面296和壁298,该壁限定在端部292、294之间延伸的接收器300。接收器300被配置用于安置植入物支撑件14。适配器290包括矩形横截面构造,如图5所示。在一些实施例中,适配器290的横截面的全部或仅一部分可具有替代的横截面配置,例如弧形、闭合形、v形、w形、椭圆形、长圆形、三角形、正方形、多边形、不规则形、均匀形、不均匀形、偏移形、交错形和/或锥形。
55.为了牵引,植入物支撑件14设置有适配器290并且植入物支撑件14a设置有适配器
270,如图6所示。具有多轴接收器602的骨螺钉600便于操纵植入物支撑件14、14a以与适配器270、290接合。齿条252包括闩锁302,该闩锁可相对于臂282枢转以置于牵引位置,如图6所示。在牵引位置,闩锁302接合齿条252,以允许臂282相对于臂262/齿条252的轴向和/或增量平移,并防止臂282相对于臂262/齿条252在相反方向的轴向平移。例如,如本文所述,闩锁300可枢转到牵引位置,以允许臂282沿图6中箭头e所示的方向平移,并防止臂282相对于臂262/齿条252沿箭头f所示的方向的平移。因此,可以执行与植入物支撑件14、14a连接的椎骨v1、v3的牵引。
56.在一些实施例中,扩张器(未示出)被插入在植入物支撑件14、14a之间以与骨解剖结构接触并确定组织深度。在一些实施例中,牵开器刀片(未示出)沿着扩张器平移以与骨解剖结构接合。刀片与组织一起布置以形成手术通道以促进脊柱植入物例如椎间植入物的插入。
57.在一些实施例中,杆插入器(未示出)与脊柱杆450接合以引导和/或导引脊柱杆450通过植入物支撑件14、14a进入接收器602。套筒80与植入物支撑件14脱离接合,如图14所示。使用驱动器(未示出)将固定螺钉601与骨螺钉600接合以固定设置有骨螺钉600的脊柱杆450的一端,该骨螺钉与植入物支撑件14连接,如图8所示。
58.植入物支撑件14、14a交叉并且压缩器械1000与植入物支撑件14、14a一起布置,如图8
‑
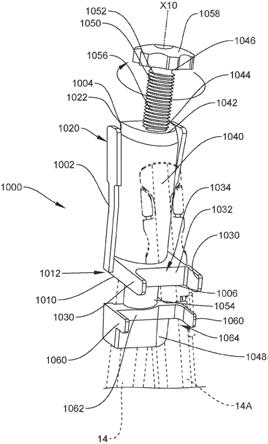
11所示。器械1000被配置成通过与植入物支撑件14、14a的连接促进椎骨v的压缩。器械1000包括构件,例如枢轴体1002,其被配置为促进植入物支撑件14a相对于主体1002的旋转。主体1002在端部1004和端部1006之间延伸并且限定轴线x10。主体1002包括限定腔体例如开口1012的表面1010。开口1012在端部1004和端部1006之间延伸。开口1012被配置为与植入物支撑件14的近端一起安置。
59.主体1002包括锁,例如一对配置为与植入物支撑件14连接的可按压按钮1020。按钮1020可安置在锁定或锁住取向和非锁定去向之间。在锁定取向上,按钮1020将主体1002与植入物支撑件14可释放地固定在一起。在非锁定取向中,主体1002可从植入物支撑件14平移和/或移除。按钮1020可以被弹簧偏置到锁定位置,例如通过按钮1020限定的突出部1022在锁定方向偏置成与植入物支撑件14的凹槽1024接合,如图13所示,以可释放地将植入物支撑件14与主体1002固定。按钮1020被配置为抵抗和/或防止主体1002从植入物支撑件14上脱离。在一些实施例中,主体1002的外表面包括一个或多个按钮1020。在一些实施例中,主体1002可包括脊以促进主体1002的抓握,例如,以相对于植入物支撑件14操纵主体1002,如本文所述。
60.端部1006包括臂1030。臂1030包括限定接收器1034的表面1032。臂1030横向于轴线x10延伸。在一些实施例中,臂1030可相对于轴线x10不同地取向,例如垂直的、成角度的和/或偏移。接收器1034被配置为与植入物支撑件14a接合。在一些实施例中,表面1032限定了具有凹形构造的腔,以促进与植入物支撑件14a的表面接合,从而促进植入物支撑件14a与植入物支撑件14的交叉。在一些实施例中,接收器1034可包括替代构造,例如弓形、偏移、交错和/或成角度的部分。
61.主体1002包括外壳1040。外壳1040包括限定开口的表面1042,例如通道1044。通道1044被配置为可移动地布置致动器1046和部件例如滑块1048。表面1042包括可与致动器1046接合的螺纹形式(未示出)以促进滑块1048的平移,如本文所述。致动器1046包括在端
部1052和端部1054之间延伸的轴1050。轴1050包括可与表面1042接合以促进平移的螺纹表面1056。端部1052包括旋钮1058以促进致动器1046的旋转。端部1054包括滑块1048。
62.滑块1048包括臂1060。臂1060包括限定接收器1064的表面1062。臂1060横向于轴1050延伸。在一些实施例中,臂1060可相对于轴1050不同地取向,例如垂直、成角度和/或偏移。接收器1064被配置为与植入物支撑件14a接合。在一些实施例中,表面1062限定了具有凹形构造的腔以促进与植入物支撑件14a的表面的接合。滑块1048被致动以沿植入物支撑件14平移,导致植入物支撑件14a在接收器1034内旋转以促进椎骨的压缩。在一些实施例中,接收器1064可包括替代构造,例如弓形、偏移、交错和/或成角度的部分。
63.为了压缩椎骨v,主体1002在植入物支撑件14上平移,如图9中的箭头g所示,使得植入物支撑件14设置有开口1012。按钮1020卡入锁定位置以用植入物支撑件14固定器械1000。滑块1048被布置在初始方位,使得接收器1034、1064被布置为彼此相邻。植入物支撑件14a设置有接收器1034、1064,如图9和10所示,使得植入物支撑件14、14a被接收器1034、1064捕获。在一些实施例中,接收器602布置成相对距离d1。在一些实施例中,距离d1约为50mm。在一些实施例中,轴610以相对角度α1布置。在一些实施例中,角度α1为约27度。
64.致动器1046被旋转,如图9中的箭头h所示,使螺纹轴1050接合外壳1040的螺纹表面。轴1050的旋转导致滑块1048在图11和12中箭头i所示的方向上平移。滑块1048沿植入物支撑件14a平移,导致椎骨v的进一步选择性压缩。接收器1062平移,导致植入物支撑件14a相对于器械1000旋转。例如,接收器602被布置成相对距离d2。在一些实施例中,距离d2约为35mm。在一些实施例中,轴610以相对角度α2布置。在一些实施例中,角度α2约为16度。
65.致动器1046进一步旋转,如图11中箭头j所示,使螺纹轴1050接合外壳1040的螺纹表面。轴1050的旋转导致滑块1048在图14和15中箭头l所示的方向上平移。滑块1048沿植入物支撑件14a平移,导致椎骨v的选择性压缩。接收器1062远离接收器1034平移,导致植入物支撑件14a相对于器械1000旋转。例如,接收器602被布置成相对距离d3。在一些实施例中,距离d3约为19mm。在一些实施例中,轴610以相对角度α3布置。在一些实施例中,角度α3约为8度。压缩器械1000和植入物支撑件14被移除,如图16所示。脊柱杆用骨螺钉600固定。
66.在完成程序后,如本文所述,移除手术系统10的手术器械、组件和非植入部件,并且闭合(一个或多个)切口。手术系统10的部件中的一个或多个可由射线可透过的材料(如聚合物)制成。可包括放射性标记物用于在x射线、荧光透视、ct或其它成像技术下进行识别。在一些实施例中,外科手术导览、显微外科手术和图像引导技术的使用可以用于借助于手术系统10来接近、查看和修复脊椎退化或损伤。在一些实施例中,手术系统10可包括一个或多个板、连接器和/或骨紧固件,用于单个椎骨水平或多个椎骨水平。
67.在一些实施例中,手术系统10包括一个或多个替代手术器械,每个手术器械被配置成用于与脊柱构造物的快速释放配置配合接合,如本文所述。这种配置有利于脊柱构造物与替代手术器械的可互换性。在一些实施例中,手术系统10包括一个或多个替代手术器械,例如插入器、延伸器、复位器、扩张器、牵引器、刀片、牵开器、夹具、镊子、升降机和钻头,它们可以被交替地设定大小和尺寸,并且被布置成套件。
68.在一些实施例中,手术系统10包括药剂,所述药剂可在手术系统10的部件和/或表面内、之上或周围设置、包装、涂覆或分层。在一些实施例中,所述药剂可包括骨生长促进材料,例如骨移植物,以增强手术系统10的部件和/或表面与椎骨的固定。在一些实施例中,所
述药剂可包括一种或多种治疗剂和/或药理学药剂,用于释放(包括持续释放)以治疗例如疼痛、炎症和退化。
69.应理解,可对本文中所公开的实施例进行各种修改。因此,以上说明不应该被解释为限制性的,但是仅作为各种实施例的例证。本领域技术人员可设想在本文随附权利要求书的范围和精神内的其它修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。