1.本发明涉及一种用于将容器保持在容器处理设备中的夹紧设备,例如用于在颈部部段中或腹部部段处保持饮料容器以运输经过容器处理设备,或者用于将饮料容器保持在容器处理设备的处理部段中以从处理部段交付给后续的处理部段,以及涉及一种容器处理设备。
背景技术:
2.在饮料灌装设施中已知的是,借助于夹紧设备来保持分别待填充或已经填充的容器,并且以这种方式将其运输经过容器处理设备的各个处理站。在此已知不同的夹紧设备,其以不同的方式方法保持相应的待处理的容器。
3.因此,例如已知被动的夹紧设备,其仅通过将相应的容器推入夹紧设备而弹性地预紧并且然后保持相应的容器。从de 10 2015 218 204 a1中已知这种用于抓握容器的夹具。夹具在此具有固定的位置。为了抓握容器,该容器必须被压入夹具中。在此,刚性的抓握臂向外张开,使得必须克服抓握臂的由于夹具的张开而产生的关闭力来运动容器。由此,容器在推入时被加载高的力,使得这样的保持设备不适合于抓握或保持易碎和/或易变形的以及薄壁的容器。至少存在相应的容器的表面被刮擦的倾向,以至于会降低容器的质量。
4.此外已知的是主动的夹紧设备,其中,夹紧设备的相应的保持部段的打开和关闭借助于致动器主动执行。这种主动的夹紧设备尤其用于实现从先前的夹紧设备安全且无损伤地接收相应的容器,或者确保将容器同样安全且保护容器地交付给随后的夹紧设备。尤其地,通过主动地打开和关闭相应的夹紧设备,能够避免在相应的容器上的增加的摩擦,所述摩擦例如会导致容器的刮擦,并且另一方面能够设定预设的保持力或夹紧力,所述保持力或夹紧力能够在容器尺寸的预设的公差范围内被遵循。这种主动的夹紧设备由大量零件例如夹紧臂、衬套、弹簧元件、预紧元件和相应的用于安全地连接上述部件的连接元件组成。因此,如此构造的夹紧设备需耗费地清洁并且具有相应高的生产成本。
5.从ep 0 939 044 a1中已知一种瓶抓握器,其中设有抓握设备,所述抓握设备具有两个抓握臂,所述抓握臂可借助于控制凸轮进入保持位置或松开位置中。控制凸轮与在每个抓握臂上构成的贴靠面共同作用,并且所述贴靠面构成为设置在相应的抓握臂上的弹性垫的组成部分。
6.为了降低主动的夹紧设备的复杂性并且同时实现夹紧设备的夹紧臂在基本状态中具有预设的位置例如关闭位置,已知的是,在夹紧设备上设置如下机构,所述机构将预紧力施加到夹紧臂上从而将夹紧臂预紧到预设的位置中。
7.从ep 2 143 674 a2中已知一种用于保持容器的主动的夹紧设备,其中,两个抓握臂或夹紧臂能够通过单独的磁体设置保持在打开位置中。夹紧臂具有向后取向的关闭杠杆,所述关闭杠杆与设置在夹紧臂和关闭杠杆之间的关闭凸轮共同作用,以便使夹紧臂从打开位置进入关闭位置中。从de 10 2017 129 506 a1中已知一种主动的夹紧设备,所述主动的夹紧设备具有弓形的预紧元件而不是单独的磁体装置。
8.de 10 2005 014 838 a1示出一种用于借助于两个夹紧臂保持的器皿主动的夹紧设备,所述夹紧臂可相对于彼此运动以打开和关闭。为了实现安全地保持器皿,夹具的一个抓握臂是形状稳定的,而另一抓握臂形状弹性地构成。抓握臂借助于设置在其上的磁体预紧到打开位置中,并且借助于控制凸轮枢转到关闭位置中。
9.原则上,在包括夹紧臂到预设位置中的预紧的常规的夹紧设备中,夹紧臂分别围绕其自身的枢转轴线可枢转地设置。换言之,夹紧设备的夹紧能够在打开位置和闭合位置之间转换,其方式为,抓握臂经历围绕其相应的枢转轴线的枢转或转动。为了关闭夹紧设备,夹紧臂围绕枢转轴线枢转或转动,使得夹紧臂的保持部段朝向彼此转动。相应地,为了打开夹具,需要使夹紧臂从而使保持部远离彼此转动。由于夹紧臂的转动式设置,尤其当夹紧设备设置用于保持不同尺寸的容器,尤其具有不同容器直径的不同容器类型时,在各个容器类型之间引起容器中轴线的错位。换言之,当不同类型的容器通过夹紧设备保持时,所述容器的中轴线在回转式圆形转盘中例如能够位于不同的节圆直径上。
10.用于主动地调节夹紧臂位置的操作单元在这种情况下设置在夹紧臂的与保持部段相对置的端部上,由此能够更好地保护操作单元免受填充产品的污染,并且操作单元或其部件不在针对待处理的容器设置的区域中或附近。
11.此外已知的是,夹紧臂经由共同的枢转轴线构成为是可枢转的,如从de 10 2011 077 167 a1中所得知的那样。然而,由此为了处理不同的容器尺寸,与具有两个单独的枢转轴线的夹紧设备相比,需要夹紧臂彼此之间的更大的枢转角度,使得即使在尺寸区别不大的容器类型中,也需要相对更强的枢转,使得不可能或难以将多个容器类型的中轴线定位在相同的节圆直径上。因此,这种夹紧设备仅受限制地适合于处理尺寸不同的容器。
技术实现要素:
12.基于已知的现有技术,本发明的目的是提供一种改进的夹紧设备,所述夹紧设备用于将容器保持在容器处理设备中,尤其用于在颈部部段中或腹部部段中保持饮料容器,以及提供一种相应的容器处理设备。
13.所述目的通过一种夹紧设备来实现,所述夹紧设备用于将容器保持在容器处理设备中,优选用于在颈部部段或腹部部段中保持饮料容器。有利的改进形式由说明书和附图中得出。
14.相应地,提出一种用于将容器保持在容器处理设备中,优选用于在颈部部段或腹部部段中保持饮料容器的夹紧设备,所述夹紧设备包括:两个夹紧臂,所述夹紧臂分别在前侧上具有保持部段,所述保持部段用于保持待保持的容器;和与夹紧臂一件式地构成的预紧元件,所述预紧元件用于将保持部段预紧在预设位置中。夹紧设备还包括,夹紧臂在共同的枢转轴线上相对于彼此可枢转地容纳在夹紧臂的与保持部段相对置的后侧的端部区域上。
15.在此,应将术语“枢转轴线”理解为几何意义上的轴线。然而,枢转轴线能够通过机械意义上的轴构成或提供,例如通过螺栓连接部、配合螺接部或销钉连接部构成或提供。
16.夹紧臂在共同的枢转轴线上相对于彼此可枢转地容纳在夹紧臂的与保持部段相对置的后侧的端部区域上,通过这种方式,与传统的夹紧设备尤其这种包括由夹紧臂和与所述夹紧臂一件式构成的预紧元件构成的一体的夹具相比,能够实现简化的构造,因为仅
需构成一个共同的枢转轴线,这相对于具有两个单独的枢转轴线的夹具所需的部件更少。
17.此外,与传统的夹紧设备相比,由此可行的是,容器类型保持在较大的直径范围上。由于枢转轴线在夹紧臂的后侧的端部区域上构成,所以所述夹紧臂与枢转轴线在夹紧臂的中心区域的夹紧臂相比,距保持部段更远。随着距枢转轴线的距离增加,在预设的枢转角度中,保持区域彼此间的距离增大。因为在这种情况下不需要较大的枢转角度来容纳具有大的直径的容器类型,所以具有相对大的直径的容器类型和具有相对小的直径的容器类型也能够基本上保持在相同的节圆直径上。
18.根据另一优选的实施方式,至少一个保持部段,优选两个保持部段,具有用于构成与所保持的容器的第一接触点的第一保持区域和用于构成与所保持的容器的第二接触点的第二保持区域,其中优选地,第一保持区域具有第一曲率,并且第二保持区域具有与第一曲率相反地取向的第二曲率。
19.术语“接触点”在此既包括点接触又包括线接触,如尤其在坚硬的、刚性的、不可变形的容器例如玻璃瓶中所构成的点接触和线接触,以及几何意义上的面接触。换言之,接触点是在夹紧臂和容器之间的局部受限的接触区域。夹紧设备在此经由接触点保持或支持所保持的容器。
20.第一保持区域设置成比第二保持区域更靠近枢转轴线。换言之,第一保持区域设置在第二保持区域和枢转轴线之间。
21.第一保持区域具有第一曲率并且第二保持区域具有与第一曲率相反地取向的第二曲率,通过这种方式,能够实现:如果具有不同直径的容器类型替选地通过夹紧设备保持,那么所述具有不同直径的容器类型特别精确地以其中心纵轴线基本上定位在相同的节圆直径上。相应地,在具有可枢转的夹紧臂的夹紧设备中,通过如此构成的保持部段,能够将具有不同直径的不同的容器类型特别精确地基本上定位在相同的节圆直径上。
22.优选地,第一保持区域具有凸性曲率,而第二保持区域具有凹性曲率。
23.术语“凸性曲率”是指相对于夹紧臂向外拱曲。相应地,术语“凹性曲率”是指相对于夹紧臂向内拱曲。具有凸性曲率的第一保持区域和具有凹性曲率的第二保持区域的实例能够从附图中得到。
24.尤其地,对于这两个夹紧臂设置共同的枢转轴线并且将保持部段构成为使得第一保持区域具有凸性曲率而第二保持区域具有凹性曲率,通过这种组合实现:具有不同的直径的不同的容器类型始终尤其精确地定位在相同的节圆直径上。
25.保持区域的曲率能够分别至少部分地具有恒定的曲率半径和/或至少部分地具有如下部段,所述部段具有相同符号的可变的曲率。
26.为了实现相对于夹紧设备的纵向方向或纵轴线基本上保持镜像对称地保持被保持在夹紧设备中的容器,其中所述纵向方向或纵轴线基本上从枢转轴线延伸到这两个保持区域之间的中点,这两个夹紧臂的第一保持部段的曲率相对于在夹紧臂之间伸展的纵轴线相反地取向。例如,这两个夹紧臂然后分别在其第一保持区域处具有凸性曲率,因此所述夹紧臂向外,即朝向纵轴线拱曲。相应地,夹紧臂的第二保持区域能够分别具有凹性曲率。
27.优选地,这两个夹紧臂的保持部段构成为彼此镜像对称。换言之,保持部段优选构成为相对于夹紧设备的位于夹紧臂之间的纵轴线镜像对称。
28.根据一个优选的实施方式,预紧元件构成为弹簧弓,其中预紧元件优选以从一个
夹紧臂延伸至另一夹紧臂的弓形部的形式构成,其中预紧元件优选在保持部段和枢转轴线之间连接在夹紧臂上,其中预紧元件优选从其在夹紧臂上的连接部向后延伸并且围拢夹紧臂,其中优选地,预紧元件和夹紧臂优选垂直于枢转轴线观察基本上在一个平面中延伸。
29.如此构成的预紧元件具有易于清洁的形状,所述形状此外能够以简单的方式来制造。此外,在弹簧弓或弓形部的长度以及其轮廓上,能够尤其精确地预设预紧力和/或使预紧力匹配于相应的应用情况,借助于预紧力预紧元件将夹紧臂预紧。
30.根据另一优选的实施方式,抓握臂分别具有控制部段,所述控制部段与用于使相应的保持部段主动地运动的操作单元相互作用,其中控制部段优选设置在保持部段和枢转轴线之间。
31.根据另一优选的实施方式,夹紧设备此外具有用于使保持部段克服预紧主动地运动的操作单元。夹紧设备于是是一种主动的夹紧设备,其中,夹紧设备的相应的保持部段的打开或关闭能够借助于操作单元主动地执行。
32.例如,在夹紧设备以圆形转盘构型在运输设备上使用时,操作元件的运动方向关于运输设备的中央的旋转轴线能够基本上径向地取向,而夹紧臂的打开和关闭(aufschwenken und zuschwenken)关于枢转轴线能够基本上切向地定向。
33.已经发现特别有利的是,操作单元的可移动的操作元件的移动,优选沿着夹紧设备的纵轴线的方向可移动的操作元件的移动,引起夹紧臂的枢转。
34.根据另一优选的实施方式,操作元件分别经由可枢转地设置在操作元件上并且可枢转地设置在相应的夹紧臂上的耦联元件与夹紧臂耦联,但或者操作元件包括至少一个齿条部段,并且夹紧臂分别具有装齿部段,其中这两个夹紧臂中的每一个通过其装齿部段分别与操作元件的至少一个齿条部耦联。这尤其关于从操作元件经由耦联元件到夹紧臂上的力导入是有利的。
35.优选地,耦联元件在保持部段和枢转轴线之间连接在相应的夹紧臂上。因此,耦联元件在所属的夹紧臂上的连接部形成控制部段。
36.根据另一优选的实施方式,保持部段彼此预紧到预设的距离中,其中预设的距离优选对应于保持部段的打开位置,并且保持部段通过夹紧臂的枢转可克服预紧运动到关闭位置中。由此能够实现:仅通过经由操作元件主动的操控就能够使夹紧设备进入关闭位置中。
37.替选地,预设的距离能够对应于保持部段的关闭位置。然后可通过枢转夹紧臂使保持部段运动到打开位置中。在该实施方式中,保持在夹具中的容器已经由于预紧而可靠地保持,其中,通过主动地操控操作元件来实现所保持的容器的释放。
38.为了通过操作元件特别精确地预设保持部段彼此间的距离,操作元件能够具有用于与用于预设操作元件的位置的预设设备相互作用的相互作用元件,其中相互作用元件优选以滑动元件和/或滚子的形式构成,所述滑动元件和/或滚子优选构成用于在引导曲线上滑动和/或滚动,其中相互作用元件优选地设置在操作元件的背离保持部段的一侧上。
39.为了防止夹紧臂在其使用期间在打开位置中由于容器的保持或夹紧臂的保持而经受夹紧臂的弹性或甚至塑性变形,尤其弹性或甚至塑性弯曲或扭曲,至少一个夹紧臂能够具有用于加固夹紧臂的至少一个子区域的加固元件,优选呈肋的形式。
40.上述目的还通过一种用于将容器保持在容器处理设备中,优选用于在颈部部段或
腹部部段中保持饮料容器的夹紧设备来实现。有利的改进形式由说明书和附图中得出。
41.相应地,提出一种用于将容器保持在容器处理设备中,优选用于在颈部部段或腹部部段中保持饮料容器的夹紧设备,所述夹紧设备包括两个可彼此反向枢转的夹紧臂,所述夹紧臂分别具有用于保持待保持的容器的保持部段,其中每个保持部段具有用于构成与所保持的容器的第一接触点的第一保持区域和用于构成与所保持的容器的第二接触点的第二保持区域。夹紧设备还构成为,使得第一保持区域具有第一曲率,而第二保持区域具有与第一曲率相反地取向的第二曲率。
42.术语“接触点”在此既包括点接触又包括线接触,如尤其在坚硬、刚性、不可变形的容器例如玻璃瓶中所构成的点接触和线接触,以及几何意义上的面接触。换言之,接触点是在夹紧臂和容器之间的局部受限的接触区域。夹紧设备在此经由接触点保持或支持所保持的容器。
43.优选地,第一保持区域设置成比第二保持区域更靠近相应的夹紧臂的枢转轴线。换言之,第一保持区域能够设置在第二保持区域和枢转轴线之间。
44.因为第一保持区域具有第一曲率并且第二保持区域具有与第一曲率相反地取向的第二曲率,所以能够实现:如果具有不同直径的容器类型替选地通过夹紧设备保持,那么所述具有不同直径的容器类型尤其精确地借助于其中心纵轴线基本上定位相同的节圆直径上。相应地,在具有可枢转的夹紧臂的夹紧设备中,通过以这种方式构成的保持部段,能够将具有不同直径的不同的容器类型特别精确地定位在基本上相同的节圆直径上。
45.优选地,第一保持区域具有凸性曲率,而第二保持区域具有凹性曲率。
46.术语“凸性曲率”是指相对于夹紧臂向外拱曲。相应地,术语“凹性曲率”是指相对于夹紧臂向内拱曲。具有凸性曲率的第一保持区域和具有凹性曲率的第二保持区域的实例能够从附图中得知。
47.保持区域的曲率能够分别至少部分地具有恒定的曲率半径和/或至少部分地具有如下部段,所述部段具有相同符号的可变的曲率。
48.为了实现保持在夹紧设备中的容器相对于夹紧设备纵轴线基本上镜像对称的保持,其中纵轴线居中地在夹紧臂之间从夹紧臂的前侧向后侧延伸,这两个夹紧臂的保持部段的曲率相对于在夹紧臂之间伸展的纵轴线相反地取向。例如,这两个夹紧臂然后分别在其第一保持区域处具有凸性曲率,因此它们向外朝向纵轴线拱曲。相应地,夹紧臂的第二保持区域能够分别具有凹性曲率。
49.优选地,这两个夹紧臂的保持部段彼此镜像对称地构成。换言之,保持部段优选相对于夹紧设备的位于夹紧臂之间的纵轴线镜像对称地构成。
50.根据另一优选的实施方式,每个夹紧臂具有自身的枢转轴线。
51.替选地,夹紧臂也能够具有共同的枢转轴线。
52.在此术语“枢转轴线”应理解为几何意义上的轴线。然而,枢转轴线能够通过机械意义上的轴构成或提供,例如通过螺栓连接部、配合螺接部或销钉连接部构成或提供。
53.尤其地,对于这两个夹紧臂设置共同的枢转轴线并且将保持部段构成为使得第一保持区域具有凸性曲率而第二保持区域具有凹性曲率,通过这种组合实现:具有不同的直径的不同的容器类型始终尤其精确地定位在相同的节圆直径上。
54.根据另一优选的实施方式,设有至少一个预紧元件,所述预紧元件用于使保持部
段彼此预紧,其中优选地,夹紧臂和至少一个预紧元件一件式地构成,其中优选地,预紧元件具有弹性的、从一个夹紧臂延伸至另一夹紧臂的弹簧弓,其中优选地,弹簧弓分别在夹紧臂的枢转轴线和保持部段之间连接在夹紧臂上,其中弹簧弓和夹紧臂优选基本上在一个平面中延伸。
55.夹紧臂的保持区域能够通过至少一个预紧元件预紧到预设的位置中。
56.构成为弹簧弓的预紧元件具有易于清洁的形状,所述形状也能够以简单的方式制造。此外,在弹簧弓或弓形部的长度以及其轮廓上,能够特别精确地预设预紧力和/或使预紧力匹配于相应的应用情况,借助于预紧力预紧元件将夹紧臂预紧。
57.根据另一优选的实施方式,保持部段彼此预紧到预设的距离中,其中预设的距离优选对应于保持部段的打开位置,并且保持部段通过夹紧臂的枢转可克服预紧运动到关闭位置中。由此能够实现:仅通过经由操作元件主动的操控就能够使夹紧设备进入关闭位置中。
58.替选地,预设的距离能够对应于保持部段的关闭位置。然后可通过枢转夹紧臂使保持部段相应运动到打开位置中。在该实施方式中,保持在夹具中的容器已经由于预紧而安全地被保持,其中,通过主动地操控操作元件能够实现所保持的容器的释放。
59.根据另一优选的实施方式,夹紧设备此外具有用于使保持部段克服预紧主动地运动的操作单元。夹紧设备于是是一种主动的夹紧设备,其中,夹紧设备的保持部段的打开或关闭能够借助于操作单元主动地执行。
60.例如,在夹紧设备以圆形转盘构型在运输设备上使用时,操作元件的运动方向关于运输设备的中央的旋转轴线能够基本上径向地取向,而夹紧臂的打开和关闭关于枢转轴线能够基本上切向地定向。
61.已经发现特别有利的是,操作单元的可移动的操作元件的移动,优选沿着夹紧设备的纵轴线的方向可移动的操作元件的移动,引起夹紧臂的枢转。
62.根据另一优选的实施方式,操作元件分别经由可枢转地设置在操作元件上并且可枢转地设置在相应的夹紧臂上的耦联元件与夹紧臂耦联,或者操作元件包括至少一个齿条部段,并且夹紧臂分别具有装齿部段,其中这两个夹紧臂中的每一个通过其装齿部段分别与操作元件的至少一个齿条部耦联。这尤其关于从操作元件经由耦联元件到夹紧臂上的力导入是有利的。
63.优选地,耦联元件在保持部段和枢转轴线之间连接在相应的夹紧臂上。因此,耦联元件在所属的夹紧臂上的连接部构成控制部段。
64.为了通过操作元件特别精确地预设保持部段彼此间的距离,操作元件能够具有用于与用于预设操作元件的位置的预设设备相互作用的相互作用元件,其中相互作用元件优选以滑动元件和/或滚子的形式构成,所述滑动元件和/或滚子优选构成用于在引导曲线上滑动和/或滚动,其中相互作用元件优选地设置在操作元件的背离保持部段的一侧上。
65.为了防止夹紧臂在其使用期间在打开位置中由于容器的保持或夹紧臂的保持而经受弹性或甚至塑性变形,尤其弹性或甚至塑性弯曲或扭曲,至少一个夹紧臂能够具有用于加固夹紧臂的至少一个子区域的加固元件,优选呈肋的形式。
66.上述目的此外通过一种容器处理设备来实现。有利的改进形式从说明书和附图中得出。
67.相应地,提出一种容器处理设备,所述容器处理设备包括用于运输容器的运输设备。所述容器处理设备的特征在于,输送设备具有至少一个根据上述实施方式之一的夹紧设备。
68.关于夹紧设备所描述的、可实现的优点和效果也类似地适用于容器处理设备。
69.关于夹紧设备所描述的特征和效果同样适用于容器处理设备,并且反之亦然。
附图说明
70.通过下面对附图的描述,详细阐述本发明的优选的其他实施方式。在此示出:
71.图1示意性地示出用于保持容器的夹紧设备的立体侧视图;
72.图2示意性地示出图1中的夹紧设备的俯视图;
73.图3示意性地示出图1中的夹紧设备的从下方观察的立体视图;
74.图4示意性地示出贯穿图1中的夹紧设备的剖视图;
75.图5示意性地示出图1中的夹紧设备在保持第一容器类型的容器时的俯视图;
76.图6示意性地示出图1中的夹紧设备在保持第二容器类型的容器时的俯视图;以及
77.图7示意性地示出容器处理设备的俯视图。
具体实施方式
78.下面根据附图描述优选的实施例。在此,相同的、相似的或起相同作用的元件在不同的附图中设有相同的附图标记,并且部分地省略对这些元件的重复描述,以便避免冗余。
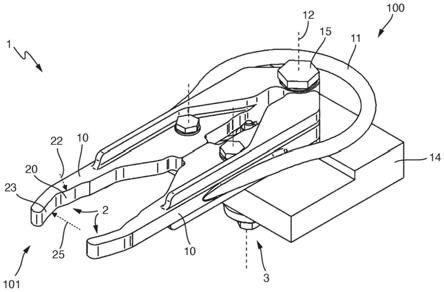
79.在图1中,示意性地示出用于保持容器的夹紧设备1的立体侧视图,在当前情况下,所述夹紧设备用于将饮料容器在腹部部段中保持在容器处理设备中。夹紧设备1包括两个夹紧臂10,所述夹紧臂分别在前侧101上具有用于保持待保持的容器的保持部段2。呈弹簧弓形式的预紧元件11与夹紧臂10一件式地构成,所述弹簧弓使夹紧臂10从而使保持部段2预紧到预设的位置中,在此即夹紧设备1的关闭的位置或保持部段2的关闭位置中。
80.预紧元件11弓形地从一个夹紧臂10的中间区域围绕后侧的端部区域100延伸到另一夹紧臂10的中间区域。
81.夹紧臂10在共同的枢转轴线12上彼此可枢转地设置在夹紧臂10的与保持部段2相对置的后侧的端部区域100上。几何的枢转轴线12通过安装到基板14上的装配螺丝15构成,如关于图4详细所描述的那样。
82.夹紧臂10关于夹紧设备1的中轴线或纵轴线13(见图2)对称地构成。
83.为了加固夹紧臂10,所述夹紧臂在枢转轴线12的方向上在两侧具有可选的、肋状的加固元件18。
84.如从图1和图2中所看到的那样,其示出图1中的夹紧设备1的俯视图,每个夹紧臂10的保持部段2具有用于构成与所保持的容器的第一接触点的第一保持区域20和用于构成与所保持的容器的第二接触点的第二保持区域23。
85.第一保持区域20包括第一曲率,所述第一曲率在此借助于附图标记22表示。第二保持区域23具有第二曲率,所述第二曲率借助于附图标记25表示。第二曲率25与第一曲率22相反地取向。
86.在当前情况下,第一保持区域20具有凸性曲率。换言之,夹紧臂10在第一保持区域
20中向外拱曲。第二保持区域23具有凹性曲率。换言之,夹紧臂10在第二保持区域23内向内拱曲。
87.在当前情况下,曲率22、25分别具有恒定的曲率半径,其中第一曲率22的曲率半径的绝对值小于第二曲率25的曲率半径的绝对值。
88.替选地,在相应的保持区域20、23的长度上观察,曲率22、25中的至少一个也能够具有其绝对值变化的曲率半径变化曲线。
89.此外,第一曲率22和大的曲率25也能够具有相同的绝对值。
90.夹紧设备1构成为主动的夹紧设备1。为此,所述夹紧设备包括操作单元3,借助于所述操作单元,夹紧臂10从而保持部段2能够从在图1和2中示出的关闭位置中反向地远离彼此枢转。相应地,通过操作单元3可行的是,使保持部段2从关闭位置枢转到打开位置中,在所述打开位置中,与在关闭位置中相比,保持部段2相对于彼此垂直于纵轴线13具有更大的距离。
91.图3示意性地示出图1中的夹紧设备1的从下方观察的立体视图,从中可看到操作单元3。
92.操作单元3包括可在纵轴线13的方向上移动的操作元件30。操作元件30分别经由可枢转地设置在操作元件30上并且可枢转地设置在相应的夹紧臂10上的耦联元件31与夹紧臂10耦联。耦联元件31在夹紧臂10的连接在中间对应于用于控制保持部段2的位置的控制部段。
93.耦联元件31连接在在保持部段2和枢转轴线12之间与所述耦联元件相关联的夹紧臂10。
94.为了能够预设操作元件30的位置,操作元件30包括滚子34,所述滚子设计用于与预设设备在此即导向曲线(未示出)相互作用,其方式为,滚子34在引导曲线上滚动。
95.图4示意性地示出沿着纵轴线13贯穿图1中的夹紧设备1的剖视图。耦联元件31借助于螺栓32可枢转地设置在夹紧臂10上。在耦联元件31的相对置的端部上,该耦联元件可枢转地连接在操作元件30上。
96.操作元件30在装配螺丝33上沿着纵轴线13的方向可移动地引导,所述装配螺丝平行于纵轴线13定向地拧入基板14中。相对于基板14,滚子34在操作元件30的与耦联元件31相对置的一侧上可旋转地设置在所述操作元件上。
97.为了改进上述部件的支承,能够设有衬套16和/或垫片17,如从图4中所看到的那样。
98.在图5中示意性地示出图1中的夹紧设备1在保持第一容器类型的容器5时的俯视图。容器5具有直径50。
99.在保持容器5时,保持部段2分别构成两个在纵轴线13的方向上彼此间隔开的接触点21、24。
100.夹紧设备1将容器5保持在预设的位置中,使得容器5的中轴线51距枢转轴线12预设的距离。
101.容器5是具有尽可能小的直径50的容器类型。
102.图6示意性地示出图1中的夹紧设备1在保持第二容器类型的容器5'时的俯视图,与图5中的容器5相比,所述第二容器类型具有更大的直径50'。
103.保持部段2在其两个保持区域20、23中分别再次形成第一接触点21和第二接触点24’。
104.与在图5中示出的位置相比,夹紧臂10围绕枢转轴线11相对于彼此枢转分开角度26。
105.借助于附图标记5,示出在其位置中的第一容器类型的容器,如所述容器通过夹紧臂10所保持的那样(参见图5)。可以看到,容器5的中轴线51和容器5'的中轴线51基本上是同心的。相应地,这两个容器5、5'在配备有夹紧设备1的呈圆形转盘构型的运输设备中在相同的节圆直径上运输。
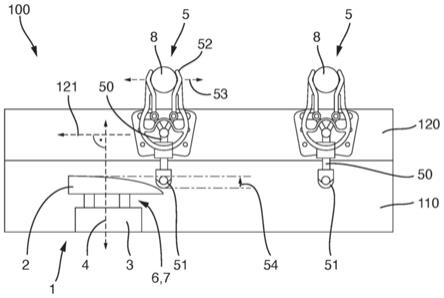
106.图7示意性地示出容器处理设备6的俯视图,所述容器处理设备具有呈圆形转盘构型的运输设备60,所述运输设备可围绕中央的旋转轴线61在至少一个运输方向62上旋转。
107.输送设备60包括多个根据图1至图6的夹紧设备1,所述夹紧设备相对于枢转轴线61径向向外取向,并且在环周方向上彼此均匀地间隔开。
108.只要是可应用的,在实施例中示出的所有单个特征能够彼此组合和/或交换,而不脱离本发明的范围。
109.附图标记列表
[0110]1ꢀꢀ
夹紧设备
[0111]
10
ꢀꢀ
夹紧臂
[0112]
100
ꢀꢀ
后侧的端部区域
[0113]
101
ꢀꢀ
前侧
[0114]
11
ꢀꢀ
预紧元件
[0115]
12
ꢀꢀ
枢转轴线
[0116]
13
ꢀꢀ
纵轴线
[0117]
14
ꢀꢀ
基板
[0118]
15
ꢀꢀ
装配螺丝
[0119]
16
ꢀꢀ
衬套
[0120]
17
ꢀꢀ
垫片
[0121]
18
ꢀꢀ
加固元件
[0122]2ꢀꢀ
保持部段
[0123]
20
ꢀꢀ
第一保持区域
[0124]
21,21
’ꢀ
第一接触点
[0125]
22
ꢀꢀ
第一曲率
[0126]
23
ꢀꢀ
第二保持区域
[0127]
24,24
’ꢀ
第二接触点
[0128]
25
ꢀꢀ
第二曲率
[0129]
26
ꢀꢀ
角度
[0130]3ꢀꢀ
操作单元
[0131]
30
ꢀꢀ
操作元件
[0132]
31
ꢀꢀ
耦联元件
[0133]
32
ꢀꢀ
螺栓
[0134]
33
ꢀꢀ
装配螺丝
[0135]
34
ꢀꢀ
滚子
[0136]
5、5' 容器
[0137]
50,50 直径
[0138]
51,51' 中轴线
[0139]6ꢀꢀ
容器处理设备
[0140]
60
ꢀꢀ
运输设备
[0141]
61
ꢀꢀ
旋转轴线
[0142]
62
ꢀꢀ
运输方向
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。