1.本公开涉及功率转换装置、方法和非暂态存储设备。
背景技术:
2.在日本未经审查的专利申请公开no.2007
‑
259610中,公开了一种装置,用于在同步电动机启动时将预定的相移值添加到输出电压的相位,一次或多次改变相移值,基于输出电流的检测值计算输出电压的频移值,并且移位输出电压的频率。
技术实现要素:
3.本公开提供了一种有效地防止电动机在启动期间的意外反向旋转的装置。
4.根据本公开的一方面的一种功率转换装置包括:第一搜索控制单元,被配置为生成第一命令以向电动机提供第一电输出;磁极位置估计单元,被配置为接收对第一电输出的第一电响应,并基于第一电响应来估计电动机的磁极的位置;条件设置单元,被配置为根据磁极的估计位置来设置脉冲提供条件;第二搜索控制单元,被配置为根据脉冲提供条件来生成第二命令以向电动机提供正电脉冲输出和负电脉冲输出;差计算单元,被配置为接收对正电脉冲输出的正电响应和对负电脉冲输出的负电响应,并计算正电响应与负电响应之间的大小差;条件改变单元,被配置为当大小差小于预定差水平时改变脉冲提供条件以生成修改后的第二命令;以及极性估计单元,被配置为当大小差大于所述预定差水平时,基于与修改后的第二命令相对应的大小差来估计磁极的极性。
5.根据本公开的另一方面的一种方法包括:生成第一命令以向电动机提供第一电输出;接收对第一电输出的第一电响应;基于第一电响应估计电动机的磁极的位置;根据磁极的估计位置来设置脉冲提供条件;根据所述脉冲提供条件来生成第二命令以向电动机提供正电脉冲输出和负电脉冲输出;接收对正电脉冲输出的正电响应和对负电脉冲输出的负电响应;计算正电响应与负电响应之间的大小差;当大小差小于预定差水平时改变脉冲提供条件以生成修改后的第二命令;以及当大小差大于预定差水平时,基于与修改后的第二命令相对应的大小差,来估计磁极的极性。
6.根据本公开的又一方面的一种非暂态存储设备在其上存储有的指令,所述指令响应于由处理设备执行而使处理设备执行包括以下的操作:生成第一命令以向包括传感器的电动机提供第一电输出;接收对第一电输出的第一电响应;基于第一电响应来估计电动机的磁极的位置;根据磁极的估计位置来设置脉冲提供条件;根据脉冲提供条件来生成第二命令以提供正电脉冲输出和负电脉冲输出;接收对正电脉冲输出的正电响应和对负电脉冲输出的负电响应;计算正电响应与负电响应之间的大小差;基于大小差来估计磁极的极性;基于磁极的估计位置和磁极的估计极性来生成驱动命令以向电动机提供电功率;接收传感器响应于驱动命令而产生的传感器反馈;基于传感器反馈来确定磁极的角度移位和磁极的移动方向;基于角度移位和移动方向来更新磁极的估计位置;以及基于移动方向来检测磁极的极性的估计错误。
7.根据本公开,可以提供一种有效地防止电动机在启动期间的意外反向旋转的装置。
附图说明
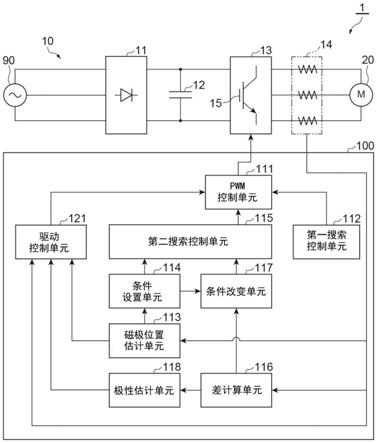
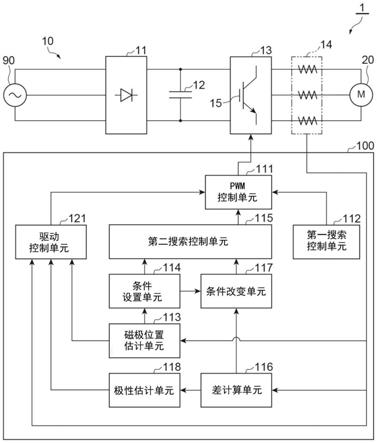
8.图1是示出功率转换装置的配置的示意图。
9.图2是示出磁极位置与正脉冲输出和负脉冲输出之间的关系的示意图。
10.图3是示出对正脉冲输出的响应的大小和对负脉冲输出的响应的大小的图。
11.图4是示出控制电路的硬件配置的框图。
12.图5是示出控制过程的流程图。
13.图6是示出第一搜索控制过程的流程图。
14.图7是示出第二搜索控制过程的流程图。
15.图8是示出功率转换装置的变型例的示意图。
16.图9是示出控制过程的变型例的流程图。
具体实施方式
17.在下面的描述中,参考附图,将相同的附图标记分配给相同的组件或具有相同功能的相似的组件,并且省略重复的描述。
18.装置
19.根据本公开的功率转换装置1是用于向电动机20提供驱动电功率的装置。电动机20是其中转子具有磁极的同步电动机。转子具有磁极的同步电动机的示例包括永磁型同步电动机。永磁型同步电动机的示例包括表面永磁(spm)电动机和内部永磁(ipm)电动机。电动机20可以是其中转子具有凸极性的同步电动机。转子具有凸极性的同步电动机的示例包括ipm电动机。
20.图2所示的电动机20是ipm电动机,并且包括定子30和转子40。定子30包括环形轭31、多个齿32和多个线圈33。多个齿32沿着轭31的圆周方向以相等的间隔布置。多个齿32中的每一个均从轭31的内周向着轭31的中心突出。多个齿32沿着转子40的旋转方向(磁极的旋转方向)以预定的角度间距(在图中为60
°
)以规则的间隔布置。多个线圈33分别附接到多个齿32。定子30响应于向多个线圈33提供电力而产生绕轭31的中心旋转的磁场。
21.转子40包括轴41、转子芯42和多个永磁体43。轴41绕轭31的中心旋转。转子芯42由软磁性材料制成并固定到轭31的外周。永磁体43嵌入转子芯42中并在转子40中形成磁极。在所示的示例中,四个永磁体43a、43b、43c和43d分别形成四个磁极40a、40b、40c和40d。
22.参考图1,功率转换装置1将电源90的初级侧电功率转换成次级侧电功率,并将次级侧电功率提供给电动机20。初级侧电功率可以是交流(ac)电功率或直流(dc)电功率。次级侧功率是ac电功率。例如,初级侧电功率和次级侧电功率都是三相ac电功率。例如,功率转换装置1包括功率转换电路10和控制电路100。
23.功率转换电路10将初级侧电功率转换为次级侧电功率,并将其提供给电动机20。功率转换电路10是例如电压型逆变器,并根据电压命令将驱动电压施加到电动机20。例如,功率转换电路10包括转换器电路11、平滑电容器12、逆变器电路13和电流传感器14。转换器电路11例如是二极管桥电路或pwm转换器电路,并将提供的电功率转换为dc电功率。平滑电
容器12对dc电功率进行平滑。
24.逆变器电路13在dc电功率和驱动电功率之间执行功率转换。例如,逆变器电路13包括多个开关元件15,并且通过对多个开关元件15进行开通和关断来执行功率转换。开关元件15例如是功率mosfet(金属氧化物半导体场效应晶体管)、igbt(绝缘栅双极型晶体管)等,并且根据栅极驱动信号而接通和断开。电流传感器14检测在逆变器电路13和电动机20之间流动的电流。例如,电流传感器14可以被配置为检测三相ac的所有相(u相、v相和w相)的电流,或可以被配置为检测三相中任两相的电流。只要不产生零相电流,u相、v相和w相的电流之和为零。因此,即使当检测到两相的电流时,也获得关于所有相的电流的信息。
25.上述功率转换电路10的配置仅是示例,并且可以以任何方式改变,只要可以将驱动电功率提供给电动机20即可。例如,功率转换电路10可以是电流型逆变器。电流型逆变器根据电流命令将驱动电流输出到电动机20。功率转换电路10可以是矩阵转换器电路,其在所提供的电功率和驱动电功率之间执行双向功率转换而不执行dc转换。当所提供的电功率是dc电功率时,功率转换电路10可以不包括转换器电路11。
26.控制电路100控制功率转换电路10以向电动机20提供驱动电功率。例如,当功率转换电路10是电压型逆变器时,控制电路100根据电压命令控制功率转换电路10以将驱动电压施加给电动机20。如果功率转换电路10是电流型逆变器,则控制电路100根据电流命令控制功率转换电路10以将驱动电流提供给电动机。
27.这里,为了驱动电动机20,通过基于转子40的磁极的位置(例如,磁极40a的位置)提供驱动电功率来调整流过定子30的电流的相位。控制电路100可以通过传感器检测磁极的位置,或者可以通过无传感器来估计磁极的位置。例如,控制电路100基于电压命令、相应地提供给电动机20的驱动电流以及频率命令来估计磁极的位置。但是,紧接在开始向控制电路100供电之后,除非使用诸如绝对值编码器之类的传感器,否则无法检测到磁极的位置。如果在磁极的位置和极性未知的状态下开始电动机20的驱动,则此后不能正确地检测到磁极的位置。如果未正确地检测到磁极的位置,则可能发生转子40的意外反向旋转。
28.控制电路100被配置为执行:生成将第一电输出(例如,搜索输出)提供给电动机20的第一命令;根据第一命令控制功率转换电路10以向电动机20提供搜索输出;接收对第一电输出的第一电响应(对搜索输出的响应);基于第一电响应来估计电动机20的磁极的位置;根据磁极的估计位置来设置脉冲提供条件;根据脉冲提供条件来生成向电动机提供正电脉冲输出(正脉冲输出)和负电脉冲输出(负脉冲输出)的第二命令;根据第二命令控制功率转换电路10以向电动机20提供正脉冲输出和负脉冲输出;接收对正电脉冲输出的正电响应和对负电脉冲输出的负电响应;计算正电响应(对正脉冲输出的响应的大小)和负电响应(对负脉冲输出的响应的大小)之间的大小差(差值);当大小差小于预定差水平时,改变脉冲提供条件以产生修改后的第二命令;以及当大小差大于预定差水平时,基于与修改后的第二命令相对应的大小差来估计磁极的极性。例如,控制电路100被配置为:重复进行改变脉冲提供条件、根据改变后的脉冲提供条件控制功率转换电路10以向电动机20提供正脉冲输出和负脉冲输出、并计算差值的操作,直到差值超过预定水平为止;以及基于差值来估计磁极的极性。
29.根据这样的配置,当正脉冲输出和负脉冲输出之间的差值不超过预定水平时,重复正脉冲输出和负脉冲输出的提供以及差值的计算,以防止基于差值对极性的错误检测。
因此,由于减少了因磁极的极性的错误检测而导致的电动机20的意外反向旋转(转子40的意外反向旋转),所以可以减少电动机20的意外反向旋转。
30.例如,控制电路100控制功率转换电路10以为电动机20提供转子40无法跟随的射频的搜索输出。当功率转换电路10是电压型逆变器时,控制电路100将来自功率转换电路10的射频的搜索电压(搜索输出)施加到电动机20,并基于响应于搜索电压的施加而提供给电动机20的搜索电流(响应)来估计至少一个磁极的位置。控制电路100根据脉冲提供条件将来自功率转换电路10的正脉冲电压(正脉冲输出)和负脉冲电压(负脉冲输出)施加到电动机20,并计算根据正脉冲电压而提供给电动机20的正电流和根据负脉冲电压而提供给电动机20的负电流之间的差值。
31.当功率转换电路10是电流型逆变器时,控制电路100控制功率转换电路10以将射频的搜索电流(搜索输出)提供给电动机20,并且基于响应于搜索电流被提供而施加到电动机20的搜索电压(响应)来估计至少一个磁极的位置。另外,控制电路100使功率转换电路10根据脉冲提供条件向电动机20提供正脉冲电流(正脉冲输出)和负脉冲电流(负脉冲输出),并计算根据正脉冲电流而施加到电动机20的正电压和根据负脉冲电流而施加到电动机20的负电压之间的差值。在下文中,将更详细地描述当功率转换电路10是电压型逆变器时的控制电路100的配置。
32.如图1所示,控制电路100包括作为功能组件(以下称为“功能块”)的pwm控制单元111、第一搜索控制单元112、磁极位置估计单元113、条件设置单元114、第二搜索控制单元115、差计算单元116、条件改变单元117、极性估计单元118和驱动控制单元121。
33.pwm控制单元111根据电压命令控制功率转换电路10以向电动机20施加驱动电压。例如,pwm控制单元111接通和断开逆变器电路13的多个开关元件15,从而将在固定坐标系(固定于定子30的坐标系)中与电压命令矢量相对应的驱动电压施加至电动机20。
34.第一搜索控制单元112控制功率转换电路10以将射频搜索电压(搜索输出的示例)施加到电动机20。例如,第一搜索控制单元112生成用于将搜索电压施加到功率转换电路10的搜索电压命令(第一命令的示例),并且将搜索电压命令输出到pwm控制单元111。搜索电压命令包括例如固定坐标系中的电压命令矢量的相位的时间变化。
35.如图2所示,固定坐标系具有在转子40的旋转中心处的原点、α轴和垂直于α轴的β轴。垂直是指以90
°
的电角度相遇。搜索电压命令包括电压命令矢量相对于α轴的相位角的时间变化。
36.返回参考图1,磁极位置估计单元113基于根据搜索电压的施加而提供给电动机20的搜索电流(对搜索输出的响应)来估计电动机20的至少一个磁极的位置。例如,磁极位置估计单元113从电流传感器14获取(或接收)搜索电流的检测结果(对第一电输出的第一电响应的示例)。磁极位置估计单元113可以估计磁极40a、40b、40c和40d中的任一个的位置,或者可以估计磁极40a、40b、40c和40d中的每一个的位置。例如,磁极位置估计单元113估计作为磁极40a的中心位置相对于α轴绕原点(转子40的旋转中心)成角度的磁极位置θ1,作为磁极40b的中心位置相对于α轴绕原点(转子40的旋转中心)成角度的磁极位置θ2,作为磁极40c的中心位置相对于α轴绕原点(转子40的旋转中心)成角度的磁极位置θ3,以及作为磁极40d的中心位置相对于α轴绕原点(转子40的旋转中心)成角度的磁极位置θ4(参见图2)。
37.条件设置单元114根据磁极的位置的估计结果来设置脉冲提供条件。例如,条件设
置单元114根据磁极位置θ1的估计结果来设置脉冲提供条件。脉冲提供条件是施加正脉冲电压和负脉冲电压的条件。正脉冲电压是在其中转子40的移动被限制为微小移动的短时间段内在固定坐标系中沿预定方向产生单个磁通矢量的电压。负脉冲电压是在其中转子40的移动被限制为微小移动的短时间段内沿与正脉冲电压产生的磁通矢量相反的方向产生磁通矢量的电压。
38.用于施加正脉冲电压和负脉冲电压的条件包括:用于确定正脉冲电压和负脉冲电压的相位的脉冲相位条件,用于确定正脉冲电压和负脉冲电压的脉冲宽度的脉冲宽度条件,以及用于确定正脉冲电压和负脉冲电压的大小的脉冲大小条件。例如,条件设置单元114基于磁极位置θ1的估计结果来确定脉冲相位条件,使得正脉冲电压和负脉冲电压的相位对应于磁极位置θ1。例如,条件设置单元114设置脉冲相位条件,使得通过施加正脉冲电压pv1而产生的磁通矢量mv1和通过施加负脉冲电压pv2而产生(或响应于第二命令产生)的磁通矢量mv2穿过至少一个磁极(例如,磁极40a)(参见图2)。在示出的示例中,可以认识到,穿过永磁体43是穿过磁极,但是取决于永磁体43的布置,可能不清楚磁极在此范围中的程度。在这种情况下,穿过磁极是指例如相对于磁极中心的位置在电角度
±
30
°
内穿过。
39.条件设置单元114设置脉冲宽度条件,使得正脉冲电压的脉冲宽度和负脉冲电压的脉冲宽度具有相同的预定值,并且设置脉冲大小条件,使得正脉冲电压的大小和负脉冲电压的大小具有相同的预定值。预先设置预定值,使得转子40不移动或者转子40的移动被限制为至少轻微的移动。例如,预先设置预定值,使得即使通过施加正脉冲电压和负脉冲电压使转子40轻微移动,磁通矢量mv1和mv2也不会偏离磁极。
40.图3是示出经过时间与电压矢量的大小之间的关系的图。在该图中,正脉冲电压pv1是在正方向上突出的单个矩形波,负脉冲电压pv2是在负方向上突出的单个矩形波。在图3中,施加时段t1对应于正脉冲电压pv1的宽度,并且施加时段t2对应于负脉冲电压pv2的宽度。施加电压v1对应于正脉冲电压pv1的大小,并且施加电压v2对应于负脉冲电压pv2的大小。
41.如图3所示,条件设置单元114可以设置脉冲提供条件以按正脉冲电压pv1和负脉冲电压pv2的顺序进行施加。相反,条件设置单元114可以设置脉冲提供条件以按负脉冲电压pv2和正脉冲电压pv1的顺序进行施加。此外,条件设置单元114可以设置脉冲提供条件,使得在正脉冲电压pv1和负脉冲电压pv2之间提供预定时段。例如,预定时间段被确定为使得在施加先前脉冲电压而产生的电流在施加后续脉冲电压之前为零。
42.返回参考图1,第二搜索控制单元115根据脉冲提供条件将来自功率转换电路10的正脉冲电压和负脉冲电压施加至电动机20。例如,第二搜索控制单元115生成用于将正脉冲电压pv1和负脉冲电压pv2从功率转换电路10施加到电动机20的电压命令(第二命令的示例),并且将此电压命令输出至pwm控制单元111。
43.差计算单元116计算正电响应(根据正脉冲电压的施加而提供给电动机20的正电流的大小)与负电响应(根据负脉冲电压的施加而提供给电动机20的负电流的大小)之间的差值。例如,差计算单元116从电流传感器14获得正电流和负电流(正电响应的示例和负电响应的示例)的检测结果。
44.差值的计算方法没有特别限制,只要可以定量地评估差值的大小即可。例如,如图3所示,差计算单元116计算根据正脉冲电压pv1的施加而提供给电动机20的正电流ra1的大
小与根据负脉冲电压pv2的施加而提供给电动机20的负电流ra2的大小之间的差作为差值。
45.差计算单元116可以计算正电流ra1的大小的积分值和负电流ra2的大小的积分值之间的差作为差值。差计算单元116可以计算正电流ra1的平均大小和负电流ra2的平均大小之间的差作为差值。差计算单元116可以计算正电流ra1的大小的最大值与负电流ra2的大小的最大值之间的差作为差值。
46.正电流ra1的大小和负电流ra2的大小之间的大小关系根据磁极的极性(例如,磁极40a的极性)而变化。例如,当通过施加正脉冲电压pv1而产生的磁通的方向(磁通矢量mv1的方向)与磁极40a在磁极位置θ1处所产生的磁通的方向(以下称为“磁体的磁通方向”)一致时,此时的正电流ra1大于当磁通矢量mv1的方向与磁体的磁通方向相反时的正电流ra1。类似地,当通过施加负脉冲电压pv2而产生的磁通的方向(磁通矢量mv2的方向)与磁体的磁通方向一致时,此时的负电流ra2大于当磁通矢量mv2的方向与磁体的磁通方向相反时的负电流ra2。因此,当正脉冲电压pv1的宽度和大小等于负脉冲电压pv2的宽度和大小时,可以基于正电流ra1和负电流ra2之间的大小关系来估计磁体的磁通方向。例如,当上述差值是正值时,磁极40a的极性被估计为磁体的磁通方向与磁通矢量mv1一致的极性(例如,n极)。当差值为负值时,磁极40a的极性被估计为磁体的磁通方向与磁通矢量mv2一致的极性(例如,s极)。然而,在实际电动机20中,当施加正脉冲电压pv1和负脉冲电压pv2时,差值的大小根据齿32面对转子40的哪一部分而改变。例如,差值的大小在齿32面对永磁体43的情况和齿32面对永磁体43之间的情况之间是不同的。由于这种实际环境的影响,当差值的大小小时,磁极的极性的估计结果可能产生错误。
47.另一方面,条件改变单元117重复进行改变脉冲提供条件、根据改变后的脉冲提供条件使第二搜索控制单元115施加正脉冲电压和负脉冲电压、以及使差计算单元116评估差值,直到差值超过预定水平为止。
48.例如,条件改变单元117可以改变脉冲提供条件,以改变通过提供正脉冲电压和负脉冲电压而产生(或者响应于第二命令而产生)的磁通矢量的方向。例如,条件改变单元117改变脉冲相位条件,以在其中图2的磁通矢量mv1和mv2不偏离同一磁极的范围内改变磁通矢量mv1和mv2的方向。例如,条件改变单元117改变脉冲相位条件,以便在根据条件设置单元114确定的脉冲相位条件的磁通矢量mv1和mv2当前穿过的磁极的范围内(相对于磁极中心的位置在电角度
±
30
°
内)改变磁通矢量mv1和mv2的方向。
49.条件改变单元117可以基于线圈33的角度间距来确定磁通矢量的方向的调整角度,并且根据调整角度来改变脉冲提供条件以改变磁通矢量的方向。例如,条件改变单元117可以改变脉冲提供条件,以将磁通矢量的方向改变角度间距的一半(0.5倍的角度间距)的奇数倍(例如,等于、3倍或5倍)。
50.条件改变单元117可以改变脉冲相位条件,使得当在磁通矢量mv1和mv2穿过磁极40a(第一磁极)的状态下的差值不超过预定水平时,磁通矢量mv1和mv2穿过磁极40b、40c和40d之一(第二磁极)。例如,条件改变单元117可以改变脉冲相位条件,使得当在磁通矢量mv1和mv2穿过磁极40a(第一磁极)的状态下的差值不超过预定水平时,磁通矢量mv1和mv2穿过磁极40b(第二磁极)。此外,条件改变单元117可以改变脉冲相位条件,使得当在磁通矢量mv1和mv2穿过磁极40b(第一磁极)的状态下的差值不超过预定水平时,磁通矢量mv1和mv2穿过磁极40c(第二磁极)。此外,条件改变单元117可以改变脉冲相位条件,使得当在磁
通矢量mv1和mv2穿过磁极40c(第一磁极)的状态下的差值不超过预定水平时,磁通矢量mv1和mv2穿过磁极40d(第二磁极)。
51.条件改变单元117可以改变脉冲提供条件,以改变正脉冲电压和负脉冲电压的大小。例如,条件改变单元117可以改变脉冲大小条件,以增加正脉冲电压pv1的施加电压v1和负脉冲电压pv2的施加电压v2的大小。条件改变单元117可以改变脉冲提供条件,以改变正脉冲电压和负脉冲电压的宽度。例如,条件改变单元117可以改变脉冲宽度条件,以延长正脉冲电压pv1的施加时段t1和负脉冲电压pv2的施加时段t2。条件改变单元117可以通过组合以下三种类型中的两种或更多种来实现:改变通过提供正脉冲电压和负脉冲电压而产生的磁通矢量的方向;改变正脉冲电压和负脉冲电压的大小;以及改变正脉冲电压和负脉冲电压的宽度。
52.极性估计单元118基于超过预定水平的差值来估计磁极40a的极性。当根据其中磁通矢量mv1和mv2穿过其他磁极的脉冲提供条件获得超过预定水平的差值时,基于差值估计其他磁极的极性。如果确定了其他磁极的极性,则自然地确定了磁极40a的极性,使得估计其他磁极的极性对应于估计磁极40a的极性。
53.驱动控制单元121基于磁极位置估计单元113对磁极的位置的估计结果和极性估计单元118对磁极的极性的估计结果,开始从功率转换电路10向电动机20提供驱动电功率。例如,驱动控制单元121生成用于将来自功率转换电路10的驱动电功率提供给电动机20的电压命令(驱动命令),并且将电压命令输出到极性控制单元121。例如,驱动控制单元121基于磁极位置估计单元113对磁极的位置的估计结果和极性估计单元118对磁极的极性的估计结果,指定(或识别)用于控制的磁极的位置。例如,将针对估计极性与预定参考极性一致的磁极的位置的估计值指定作为用于控制的磁极的位置。在这种情况下,将产生方向与磁通矢量mv1的方向一致的磁通的磁极的位置的估计值指定为用于控制的磁极的位置。在下文中,将位置被指定的磁极称为“正方向磁极”。驱动控制单元121在旋转坐标系中生成电压命令。旋转坐标系是以确定为与正方向磁极同步旋转的旋转速度旋转的坐标系。例如,驱动控制单元121在旋转坐标系中生成电压命令,使得提供给电动机20的驱动电流遵循电流命令。此后,驱动控制单元121基于旋转坐标系中的电压命令和正方向磁极的位置来计算固定坐标系中的电压命令矢量,并将所计算出的电压命令矢量输出至pwm控制单元111。
54.此后,驱动控制单元121通过基于旋转检测传感器(例如,编码器)的输出的磁极位置计算或无传感器磁极位置估计(基于电压命令、响应于电压命令而提供给电动机20的驱动电流、以及频率命令的磁极位置估计)连续更新正方向磁极的位置,并基于正方向磁极的更新位置将固定坐标系中的电压命令矢量重复地输出至pwm控制单元111。因此,根据正方向磁极的位置连续地提供驱动电功率。驱动控制单元121从电流传感器14获取驱动电流的检测结果。
55.图4是示出控制电路100的硬件配置的示意图。如图4所示,控制电路100包括一个或多个处理器191、存储器192、存储装置193、输入/输出端口194和切换控制电路195。存储装置193包括计算机可读存储介质,例如非易失性半导体存储器。存储装置193存储用于控制装置的程序,用于:控制功率转换电路10以向电动机20提供搜索输出;基于对搜索输出的响应来估计电动机20的磁极的位置;根据估计的磁极位置设置脉冲提供条件;根据脉冲提供条件控制功率转换电路10以为电动机20提供正脉冲输出和负脉冲输出;计算对正脉冲输
出的响应的大小与对负脉冲输出的响应的大小之间的差值;重复进行改变脉冲提供条件、根据改变后的脉冲提供条件控制功率转换电路10以向电动机20提供正脉冲输出和提供负脉冲输出至电动机20、并计算差值的操作,直到差值超过预定水平为止;并基于差值估计磁极的极性。存储装置193存储用于使控制电路100配置上述功能块的程序。
56.存储器192临时存储从存储装置193的存储介质加载的程序和处理器191的操作结果。处理器191与存储器192协作执行程序以配置控制电路100的每个功能块。输入/输出端口194根据来自处理器191的命令向/从电流传感器14输入/输出电信号。切换控制电路195通过根据来自处理器191的命令接通和断开逆变器电路13中的多个开关元件15来向电动机20输出驱动电功率。
57.应当注意,控制电路100不限于通过程序配置每个功能的控制电路。例如,控制电路100的功能的至少一部分可以由专用逻辑电路或其中集成有专用逻辑电路的专用集成电路(asic)来配置。
58.控制过程
59.接下来,将描述由控制电路100执行的电动机20的启动控制过程作为控制方法的示例。过程包括:控制功率转换电路10以向电动机20提供搜索输出;基于对搜索输出的响应来估计电动机20的磁极的位置;根据估计的磁极位置设置脉冲提供条件;根据脉冲提供条件控制功率转换电路10以为电动机20提供正脉冲输出和负脉冲输出;计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;重复进行改变脉冲提供条件、根据改变后的脉冲提供条件控制功率转换电路10以向电动机20提供正脉冲输出和负脉冲输出、以及计算差值的操作,直到差值超过预定水平为止;并基于差值估计磁极的极性。
60.如图5所示,控制电路100首先执行操作s01、s02、s03、s04、s05和s06。在操作s01中,第一搜索控制单元112使功率转换电路10将射频的搜索电压施加到电动机20。稍后将描述操作s01的更详细的过程。在操作s02中,磁极位置估计单元113基于根据搜索电压的施加而提供给电动机20的搜索电流来估计电动机20的磁极的位置。在操作s03中,条件设置单元114根据磁极的位置的估计结果来设置脉冲提供条件。
61.在操作s04中,第二搜索控制单元115根据脉冲提供条件,将正脉冲电压和负脉冲电压从功率转换电路10施加到电动机20。稍后将描述操作s04的更详细的过程。在操作s05中,差计算单元116计算根据正脉冲电压的施加而提供给电动机20的正电流的大小与根据负脉冲电压的施加而提供给电动机20的负电流的大小之间的差值。在操作s06中,条件改变单元117检查差值是否超过预定水平。
62.如果在操作s06中确定差值不超过预定水平,则控制电路100执行操作s07。在操作s07中,条件改变单元117改变脉冲提供条件。此后,条件改变单元117使处理返回到操作s04。此后,重复进行根据脉冲提供条件从功率转换电路10向电动机20施加正脉冲电压和负脉冲电压、计算差值以及改变脉冲提供条件的操作,直到差值超过预定水平为止。
63.如果在操作s06中确定差值超过预定水平,则控制电路100执行操作s08和s09。在操作s08中,极性估计单元118基于超过预定水平的差值来估计磁极40a的极性。在操作s09中,驱动控制单元121基于由磁极位置估计单元113对磁极的位置的估计结果和由极性估计单元118对磁极的极性的估计结果,开始从功率转换电路10向电动机20提供驱动电功率。然后,驱动控制单元121通过基于旋转检测传感器的输出的磁极位置计算或无传感器磁极位
置估计,连续更新正方向磁极的位置,并且基于正方向磁极的位置的更新结果将固定坐标系中的电压命令矢量重复输出至pwm控制单元111。因此,根据磁极的位置连续地提供驱动电功率。这样就完成了电动机20的启动控制过程。
64.图6是示出在操作s01中施加搜索电压的过程的流程图。如图6所示,控制电路100首先执行操作s11、s12和s13。在操作s11中,第一搜索控制单元112开始将搜索电压从功率转换电路10施加到电动机20。在操作s12中,磁极位置估计单元113从电流传感器14获取搜索电流的检测结果,并且存储所获取的检测结果和此时的搜索电压的相位。在操作s13中,第一搜索控制单元112检查是否已经经过预定的搜索时段。
65.如果在操作s13中确定没有经过搜索时段,则控制电路100使处理返回到操作s12。此后,重复进行搜索电压的施加以及与之对应的搜索电流的检测结果的获取和存储,直到经过搜索时段为止。
66.如果在操作s13中确定已经经过搜索时段,则控制电路100执行操作s14。在操作s14中,第一搜索控制单元112停止将搜索电压从功率转换电路10施加到电动机20。这完成了搜索电压施加过程。
67.图7是示出在操作s04中施加正脉冲电压和负脉冲电压的过程的流程图。如图7所示,控制电路100首先执行操作s21、s22、s23和s24。在操作s21中,第二搜索控制单元115等待正脉冲电压的施加定时。在操作s22中,第二搜索控制单元115开始将来自功率转换电路10的正脉冲电压施加至电动机20。在操作s23中,差计算单元116从电流传感器14获取正电流的检测结果。在操作s24中,第二搜索控制单元115检查是否已经经过了正脉冲电压的施加时段。
68.如果在操作s24中确定未经过正脉冲电压的施加时段,则控制电路100使处理返回到操作s23。此后,重复施加正脉冲电压和获取正电流的检测结果,直到经过正脉冲电压的施加时段为止。
69.如果在操作s24中确定已经经过了正脉冲电压的施加时段,则控制电路100执行操作s25、s31、s32、s33和s34。在操作s25中,第二搜索控制单元115停止将正脉冲电压从功率转换电路10施加到电动机20。在操作s31中,第二搜索控制单元115等待负脉冲电压的施加定时。在操作s32中,第二搜索控制单元115开始将来自功率转换电路10的负脉冲电压施加到电动机20。在操作s33中,差计算单元116从电流传感器14获得负电流检测结果。在操作s34中,第二搜索控制单元115检查是否已经经过了负脉冲电压的施加时段。
70.如果在操作s34中确定没有经过负脉冲电压的施加时段,则控制电路100使处理返回到操作s33。此后,重复施加负脉冲电压和获取负电流的检测结果,直到经过负脉冲电压的施加时段为止。
71.如果在操作s34中确定已经经过了负脉冲电压的施加时段,则控制电路100执行操作s35。在操作s35中,第二搜索控制单元115停止将负脉冲电压从功率转换电路10施加到电动机20。这完成了正脉冲电压和负脉冲电压的施加过程。
72.如上所述,功率转换装置1包括:第一搜索控制单元112,被配置为控制功率转换电路10以向电动机20提供搜索输出;磁极位置估计单元113,被配置为基于对搜索输出的响应来估计电动机20的磁极的位置;条件设置单元114,被配置为根据估计的磁极位置来设置脉冲提供条件;第二搜索控制单元115,被配置为根据脉冲提供条件控制功率转换电路10以向
电动机20提供正脉冲输出和负脉冲输出;差计算单元116,被配置为计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;条件改变单元117,被配置为重复进行改变脉冲提供条件、由第二搜索控制单元115根据改变后的脉冲提供条件提供正脉冲输出和负脉冲输出、并由差计算单元116计算查值,直到差值超过预定水平为止;以及极性估计单元118,被配置为基于差值估计磁极的极性。
73.根据功率转换装置1,当正脉冲输出和负脉冲输出之间的差值不超过预定水平时,重复提供正脉冲输出和负脉冲输出以及计算差值,从而抑制基于差值对极性的错误检测。因此,由于减少了因磁极的极性的错误检测而引起的电动机20的意外反向旋转,所以可以减少电动机20的意外反向旋转。
74.条件设置单元114可以被配置为:设置脉冲提供条件,使得通过提供正脉冲输出和负脉冲输出而产生的磁通矢量穿过磁极。在这种情况下,可以更可靠地减少提供正脉冲输出和负脉冲输出的次数。
75.条件改变单元117可以被配置为:改变脉冲提供条件,以改变通过提供正脉冲输出和负脉冲输出而产生的磁通矢量的方向。在这种情况下,可以快速调整脉冲提供条件。
76.电动机20可以包括:多个线圈33,这多个线圈33沿磁极的旋转方向以预定角度间距布置;以及条件改变单元117,该条件改变单元117可以被配置为基于角度间距来确定磁通矢量的方向的调整角度,并且根据调整角度改变脉冲提供条件以改变磁通矢量的方向。对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值可以根据每个线圈33面对转子40的哪一部分而变化。通过基于角度间距改变磁通矢量的方向,可以通过增加到线圈33的不容易受到转子40影响的提供电流并减小到线圈33的容易受到转子40影响的提供电流,来快速地调整脉冲提供条件。
77.条件改变单元117可以被配置为:改变脉冲提供条件,以将磁通矢量的方向基本上改变角度间距的一半的奇数倍。在这种情况下,可以更快速地调整脉冲提供条件。
78.磁极位置估计单元113被配置为:基于对搜索输出的响应来估计第一磁极和第二磁极的位置,其中条件设置单元114被配置为:设置脉冲提供条件,使得通过提供正脉冲输出和负脉冲输出而产生的磁通矢量穿过第一磁极,并且其中条件改变单元117被配置为:改变脉冲提供条件,使得通过提供正脉冲输出和负脉冲输出而产生的磁通矢量穿过第二磁极。在这种情况下,可以快速调整脉冲提供条件。
79.条件改变单元117被配置为:改变脉冲提供条件,以改变正脉冲输出和负脉冲输出的大小。在这种情况下,可以快速调整脉冲提供条件。
80.条件改变单元117被配置为:改变脉冲提供条件,以改变正脉冲输出和负脉冲输出的宽度。在这种情况下,可以快速调整脉冲提供条件。
81.图8是示出功率转换装置1的变型例的示意图。在该变型例中,电动机20包括传感器21。传感器21检测磁极40a、40b、40c和40d的移位(时变位移)。检测磁极40a、40b、40c和40d的移位包括检测磁极40a、40b、40c和40d的移位方向。传感器21的示例包括脉冲发生器,该脉冲发生器根据转子40的旋转而输出第一脉冲波信号和第二脉冲波信号。第二脉冲波信号是其脉冲宽度等于第一脉冲波信号的脉冲宽度并且其相位从第一脉冲波信号的相位移位的信号。基于第一脉冲波信号和第二脉冲波信号,检测转子40在哪个方向上旋转(磁极40a、40b、40c和40d在哪个方向上移位)。基于第一脉冲波信号和第二脉冲波信号的频率来
检测转子40的旋转速度(磁极40a、40b、40c和40d的移位速度)。此外,基于第一脉冲波信号和第二脉冲波信号的计数值来检测转子40的旋转角度(磁极40a、40b、40c和40d的移位角)。
82.代替上述的磁极位置估计单元113,在此变型例中的控制电路100包括磁极位置估计单元131和磁极位置更新单元132。像磁极位置估计单元113一样,磁极位置估计单元131基于根据搜索电压的施加而提供给电动机20的搜索电流来估计电动机20的磁极的位置。
83.磁极位置更新单元132基于传感器21的检测结果,更新由磁极位置估计单元131对磁极的位置的估计结果。例如,磁极位置更新单元132基于传感器21输出的第一脉冲波信号和第二脉冲波信号识别磁极的移位方向和移位角度(时变角度移位),并基于识别出的移位方向和移位角度(时变角度移位)来更新磁极的位置的估计结果。这样,通过磁极位置更新单元132来更新由磁极位置估计单元131对磁极的位置的估计结果,从而即使在磁极位置估计单元131估计磁极位置之后仍然连续地获得磁极的当前位置的信息。
84.驱动控制单元121基于由磁极位置更新单元132更新的磁极的位置的估计结果和极性估计单元118对磁极的极性的估计结果,控制功率转换电路10以向电动机20提供驱动电功率。例如,驱动控制单元121基于由磁极位置更新单元132更新的磁极的位置的估计结果和极性估计单元118对磁极的极性的估计结果来指定正方向磁极的位置,并且基于旋转坐标系中的电压命令和正方向磁极的位置,计算固定坐标系中的电压命令矢量。
85.在该变型例中的控制电路100还包括错误检测单元133。错误检测单元133基于响应于驱动电功率的提供而由传感器21检测到的磁极位置的改变方向来检测磁极的极性的估计错误。例如,当磁极的位置沿与根据驱动电功率而产生的旋转磁场的旋转方向相反的方向改变时,错误检测单元133检测磁极的极性的估计错误。
86.当错误检测单元133检测到估计错误时,极性估计单元118可以反转磁极的极性的估计结果。例如,极性估计单元118可以将正方向磁极的位置在电角度上移位180
°
。当正方向磁极移位180
°
电角度时,已被视为正方向磁极的位置的极性反转。因此,将正方向磁极的位置移位180
°
对应于反转磁极的极性的估计结果的示例。然后,驱动控制单元121基于移位后的正方向磁极的位置,将来自功率转换电路10的驱动电功率提供给电动机20。在这种情况下,极性估计单元118可以在预定时段内逐渐移位正方向磁极的位置。
87.此外,极性估计单元118可以将已经被视为正方向磁极的位置重新指定为在与磁通矢量mv1相反的方向上产生磁通的磁极的位置。以下,将在与磁通矢量mv1相反的方向上产生磁通的磁极称为“负方向磁极”。在这种情况下,驱动控制单元121可以反转d轴电流命令值、q轴电流命令值和v/f电压命令值的符号,以将用于正方向磁极的控制改变为用于负方向磁极的控制。在这种情况下,驱动控制单元121可以在预定时段内朝着符号反转值逐渐改变d轴电流命令值、q轴电流命令值和v/f电压命令值的值。
88.在该变型例中,控制电路100在图5的操作s09中开始驱动控制,然后执行图9所示的过程。例如,控制电路100首先执行操作s41。在操作s41中,磁极位置更新单元132基于传感器21的检测结果,更新磁极位置估计单元131对磁极的位置的估计结果。
89.接下来,控制电路100执行操作s42。在操作s42中,错误检测单元133检查磁极的位置是否已经在与根据驱动电功率产生的旋转磁场的旋转方向相反的方向上改变。如果在操作s42中确定磁极的位置已经沿与旋转磁场的旋转方向相反的方向改变,则控制电路100执行操作s43、s44、s45和s46。
90.在操作s43中,错误检测单元133检测磁极的极性的估计错误。在操作s44中,驱动控制单元121停止将来自功率转换电路10的驱动电功率提供给电动机20。在操作s45中,极性估计单元118反转磁极的极性的估计结果。在操作s46中,驱动控制单元121基于反转的磁极的极性,继续控制功率转换电路10以向电动机20提供驱动电功率。
91.如上所述,根据变形例的功率转换装置1包括:磁极位置更新单元132,被配置为基于由传感器21检测到的位置改变来更新磁极的估计位置;驱动控制单元121,被配置为基于磁极的更新位置和磁极的估计极性来控制功率转换电路10以向电动机20提供驱动电功率;以及错误检测单元133,被配置为基于由传感器21检测到的磁极的移动方向来检测磁极的极性的估计错误。因此,可以快速地检测出磁极的极性的估计错误,并且可以减小其影响。
92.当错误检测单元133检测到估计错误时,极性估计单元118可以反转磁极的极性的估计结果。在这种情况下,可以基于由磁极位置更新单元132连续跟踪的磁极位置和由极性估计单元118反转的磁极的极性的估计结果,来使电动机20的操作快速正常化。
93.当进一步设置磁极位置更新单元132和错误检测单元133时,可以省略条件改变单元117,因为可以快速地检测到估计错误并且可以如上所述快速地使电动机20的操作正常化。极性估计单元118可以基于差值估计磁极的极性,而不管差值是否超过预定水平。
94.应该理解的是,并非本文所描述的所有方面、优点和特征都必须通过任何一个特定的示例实施例来实现或包括在其中。实际上,已经在本文中描述和示出了各种示例,但是显然可以在布置和细节上修改出其他示例。
95.要求保护落入本文要求保护的主题的精神和范围内的所有修改和变化。
96.关于以上实施例,附加了以下附录。
97.(附录1)一种功率转换装置,包括电路,所述电路被配置为:
98.控制功率转换电路以向电动机提供搜索输出;
99.基于对搜索输出的响应来估计电动机的磁极的位置;
100.根据磁极的估计位置来设置脉冲提供条件;
101.根据脉冲提供条件控制功率转换电路以向电动机提供正脉冲输出和负脉冲输出;
102.计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;
103.重复包括以下的操作,直到差值超过预定水平:
104.改变脉冲提供条件;
105.根据改变后的脉冲提供条件来提供正脉冲输出和负脉冲输出;以及
106.计算差值;以及
107.基于差值来估计磁极的极性。
108.(附录2)根据附录1所述的功率转换装置,其中,所述电路还被配置为:设置脉冲提供条件,使得通过提供正脉冲输出和负脉冲输出而产生的磁通矢量穿过磁极。
109.(附录3)根据附录2所述的功率转换装置,其中,所述电路还被配置为:改变脉冲提供条件,以改变通过提供正脉冲输出和负脉冲输出而产生的磁通矢量的方向。
110.(附录4)根据附录3所述的功率转换装置,其中,电动机包括多个线圈,这多个线圈沿磁极的旋转方向以预定的角度间距布置;以及
111.所述电路还被配置为:基于角度间距来确定磁通矢量的方向的调整角度,并且根据调整角度改变脉冲提供条件以改变磁通矢量的方向。
112.(附录5)根据附录4所述的功率转换装置,其中,所述电路还被配置为:改变脉冲提供条件,以使磁通矢量的方向基本上改变角度间距的一半的奇数倍。
113.(附录6)根据附录3所述的功率转换装置,其中,所述电动机包括第一磁极和第二磁极,第一磁极是所述磁极,第二磁极形成在与所述磁极不同的位置,
114.其中,所述电路还被配置为:基于对搜索输出的响应来估计第一磁极和第二磁极的位置,
115.其中,所述电路还被配置为:设置脉冲提供条件,使得通过提供正脉冲输出和负脉冲输出而产生的磁通矢量穿过第一磁极,以及
116.其中,所述电路还被配置为:改变脉冲提供条件,使得通过提供正脉冲输出和负脉冲输出而产生的磁通矢量穿过第二磁极。
117.(附录7)根据附录1至5中任一项所述的功率转换装置,其中,所述控制电路还被配置为:基于磁极的估计位置和磁极的估计极性来控制功率转换电路以向电动机提供驱动电功率。
118.(附录8)根据附录7所述的功率转换装置,其中,电动机包括作为所述磁极的第一磁极和具有与第一磁极的极性相反的极性的第二磁极,以及
119.其中,所述控制电路还被配置为:
120.当第一磁极的估计极性与预定参考极性一致时,将正方向磁极的位置确定为第一磁极的估计位置;
121.当第一磁极的估计极性与参考极性相反时,将正方向磁极的位置确定为第二磁极的估计位置;以及
122.基于正方向磁极的位置来控制功率转换电路以向电动机提供驱动电功率。
123.(附录9)根据附录2至4中任一项所述的功率转换装置,其中,所述电路还被配置为:改变脉冲提供条件,以改变正脉冲输出和负脉冲输出的大小。
124.(附录10)根据附录2至5中任一项所述的功率转换装置,其中,所述电路还被配置为:改变脉冲提供条件,以改变正脉冲输出和负脉冲输出的宽度。
125.(附录11)根据附录1至6中任一项所述的功率转换装置,其中,电动机包括传感器,该传感器被配置为检测磁极的位置改变,以及
126.其中,所述电路还被配置为:
127.基于传感器检测到的位置改变,更新磁极的估计位置;
128.基于磁极的更新位置和磁极的估计极性,控制功率转换电路以向电动机提供驱动电功率;以及
129.基于由传感器检测到的磁极的移动方向,检测磁极的极性的估计错误。
130.(附录12)根据附录11所述的功率转换装置,其中,所述电路还被配置为:响应于检测到估计错误而反转磁极的极性。
131.(附录13)根据附录12所述的功率转换装置,其中,所述电路还被配置为:
132.基于磁极的估计极性来识别具有预定参考极性的正方向磁极的位置,并且基于正方向磁极的位置来控制功率转换电路以向电动机提供驱动电功率;
133.响应于检测到估计错误,将正方向磁极的位置在电角度上移位180
°
;以及
134.基于正方向磁极的移位位置,控制功率转换电路以向电动机提供驱动电功率。
135.(附录14)一种功率转换装置,包括电路,所述电路被配置为:
136.控制功率转换电路以向电动机提供搜索输出,电动机具有被配置为检测磁极的位置改变的传感器;
137.基于对搜索输出的响应,估计电动机的磁极的位置;
138.根据磁极的估计位置设置脉冲提供条件;
139.根据脉冲提供条件控制功率转换电路,以向电动机提供正脉冲输出和负脉冲输出;
140.计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;
141.基于差值来估计磁极的极性;
142.根据传感器检测到的位置改变,更新磁极的估计位置;
143.基于磁极的更新位置和磁极的估计极性,控制功率转换电路以向电动机提供驱动电功率;以及
144.基于由传感器检测到的磁极的移动方向,检测磁极的极性的估计错误。
145.(附录15)根据附录14所述的功率转换装置,其中,所述电路还被配置为:响应于检测到估计错误而反转磁极的估计极性。
146.(附录16)根据附录15所述的功率转换装置,其中,所述电路还被配置为:
147.基于磁极的估计极性来识别具有预定参考极性的正方向磁极的位置,并且基于正方向磁极的位置来控制功率转换电路以向电动机提供驱动电功率;
148.响应于检测到估计错误,将正方向磁极的位置在电角度上移位180
°
;以及
149.根据正方向磁极的移位位置,控制功率转换电路以向电动机提供驱动电功率。
150.(附录17)一种控制方法,包括:
151.控制功率转换电路以向电动机提供搜索输出;
152.基于对搜索输出的响应来估计电动机的磁极的位置;
153.根据磁极的估计位置来设置脉冲提供条件;
154.根据脉冲提供条件来控制功率转换电路以向电动机提供正脉冲输出和负脉冲输出;
155.计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;
156.重复包括以下的操作,直到差值超过预定水平:改变脉冲提供条件,根据改变后的脉冲提供条件控制功率转换电路以提供正脉冲输出和负脉冲输出,以及计算差值;以及
157.基于差值估计磁极的极性。
158.(附录18)一种控制方法,包括:
159.控制功率转换电路以向电动机提供搜索输出,电动机具有被配置为检测磁极的位置改变的传感器;
160.基于对搜索输出的响应,估计电动机的磁极的位置;
161.根据磁极的位置的估计结果设置脉冲提供条件;
162.根据脉冲提供条件控制功率转换电路,以提供正脉冲输出和负脉冲输出;
163.计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;
164.基于差值来估计磁极的极性;
165.根据传感器检测到的位置改变,更新磁极的估计位置;
166.基于磁极的位置的更新估计结果和磁极的估计极性,控制功率转换电路以向电动机提供驱动电功率;以及
167.基于由传感器检测到的磁极的移动方向,检测磁极的极性的估计错误。
168.(附录19)一种非暂态存储设备,其上存储有指令,这些指令响应于由处理设备执行而使处理设备执行包括以下的操作:
169.控制功率转换电路以向电动机提供搜索输出;
170.基于对搜索输出的响应来估计电动机的磁极的位置;
171.根据磁极的估计位置来设置脉冲提供条件;
172.根据脉冲提供条件控制功率转换电路以向电动机提供正脉冲输出和负脉冲输出;
173.计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;
174.重复包括以下的操作,直到差值超过预定水平:改变脉冲提供条件,根据改变后的脉冲提供条件控制功率转换电路以提供正脉冲输出和负脉冲输出,以及计算差值;以及
175.基于差值估计磁极的极性。
176.(附录20)一种非暂态存储设备,其上存储有指令,这些指令响应于由处理设备执行而使处理设备执行包括以下的操作:
177.控制功率转换电路以向电动机提供搜索输出,电动机具有被配置为检测磁极的位置改变的传感器;
178.基于对搜索输出的响应,估计电动机的磁极的位置;
179.根据磁极的位置的估计结果设置脉冲提供条件;
180.根据脉冲提供条件控制功率转换电路,以提供正脉冲输出和负脉冲输出;
181.计算对正脉冲输出的响应的大小与对负脉冲输出的响应的大小之间的差值;
182.基于差值来估计磁极的极性;
183.基于传感器检测到的检测结果,更新磁极的估计位置;
184.基于磁极的位置的更新估计结果和磁极的估计极性,控制功率转换电路以向电动机提供驱动电功率;以及
185.基于由传感器检测到的磁极的移动方向,检测磁极的极性的估计错误。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。