功率控制装置以及功率控制方法
1.本技术以日本专利申请2020
‑
088801(申请日:2020年5月21日)为基础且享受该申请的优先权。本技术通过参照该申请而包含该申请的全部内容。
技术领域
2.本发明的实施方式涉及功率控制装置以及功率控制方法。
背景技术:
3.电力系统的频率调整主要通过火力发电站、水力发电站的输出调整来进行。太阳能发电、风力发电等利用了可再生能源的发电设备,随着自然环境的变化而输出以较短周期大幅度变动。为了抑制由于短周期的输出变动而引起的频率变动,除了火力发电站、水力发电站的频率调整之外,基于二次电池系统的频率调整逐渐被实用化。在美国,导入有根据来自系统运用机构的充放电指令来进行充放电的二次电池系统,承担频率调整的一部分。
4.以往,扬水发电设备主要用于以比较长的周期变化的电力需求的调整。但是,随着利用了可再生能源的发电设备增加,今后,要求扬水发电设备除了长周期的调整功能之外,还与二次电池系统同样地具有短周期且响应速度较快的调整功能。
5.扬水发电设备是将电力蓄积为水的能量并在需要时进行发电的系统,能够实现与二次电池的充电、放电相当的使用方法。扬水发电设备在发电运转中,根据测定出的系统频率与基准频率之间的频率偏差,调整发电输出,并进行系统的频率调整。通过调整导流叶片开度来进行发电输出的调整。但是,定速扬水发电设备无法调整转速,因此在扬水运转中无法调整输入,而无法进行频率调整。另一方面,变速扬水发电设备在扬水运转中能够调整转速,因此能够根据测定出的系统频率与基准频率之间的频率偏差来调整扬水输入,并进行系统的频率调整。在如此动作的变速扬水发电设备中,既能够进行发电输出(相当于放电)的调整又能够进行扬水输入(相当于充电)的调整。
6.但是,为了将扬水运转(相当于充电)切换成发电运转(相当于放电)或者从发电运转(相当于放电)切换成扬水运转(相当于充电),需要使旋转方向反转,必须在暂时停止之后重新起动。因此,无法如二次电池那样,高速地根据充放电指令值而从扬水运转(相当于充电)切换成发电运转(相当于放电),或者从发电运转(相当于放电)切换成扬水运转(相当于充电)。
7.因此,希望提出一种控制技术,在扬水发电设备、发电设备、扬水设备、或者利用水以外的物质的能量的能够变速运转的设备中,能够进行与充放电指令值相应的运转,且能够减少流量调整机构、整流机构或者物质量调整机构的无用动作,能够使流量调整机构、整流机构或者物质量调整机构长寿命化。
技术实现要素:
8.根据实施方式,提供一种功率控制装置,应用于如下设备,该设备具备:将流体的能量转换成旋转能量的原动机或者将旋转能量转换成流体的能量的流体机械;与上述原动
机机械地连接并将该原动机的旋转能量转换成电能的旋转电机或者与上述流体机械连接并将电能转换成旋转能量的旋转电机;对上述原动机的流量调整机构或者整流机构的开度进行调整的调速机构;以及对上述旋转电机的电气参数进行控制并对上述旋转电机的有效功率或者转速进行控制的功率转换机构,上述功率控制装置具备:有效功率指令值运算机构,将输出指令值或者输入指令值、以及充放电指令值作为输入,使用所输入的上述输出指令值或者上述输入指令值、以及上述充放电指令值,对多个有效功率指令值进行运算;功率转换控制指令值运算机构,使用由上述有效功率指令值运算机构运算出的多个有效功率指令值中的一个,对向上述功率转换机构提供的功率转换控制指令值进行运算;以及调速控制指令值运算机构,使用由上述有效功率指令值运算机构运算出的多个有效功率指令值中的、与在上述功率转换控制指令值的运算中使用的有效功率指令值不同的有效功率指令值,对向上述调速机构提供的调速控制指令值进行运算。
附图说明
9.图1是表示各实施方式中共通的扬水发电设备的构成的一例的图。
10.图2是表示第1实施方式的有效功率控制部20的功能构成的一例的框图。
11.图3是简要地表示图2所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
12.图4a是表示各实施方式中共通的有效功率指令值的生成处理的一例的流程图。
13.图4b是表示各实施方式中共通的二次电流指令值的生成处理的一例的流程图。
14.图4c是表示各实施方式中共通的导流叶片开度指令值的生成处理的一例的流程图。
15.图5是表示各实施方式中共通的生成第1有效功率指令值的处理顺序的一例的流程图。
16.图6是表示生成各实施方式中共通的第2有效功率指令值的处理顺序的一例的流程图。
17.图7是表示第1实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
18.图8是表示第2实施方式的有效功率控制部20的功能构成的一例的框图。
19.图9是简要地表示图8所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
20.图10是表示第2实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
21.图11是表示第3实施方式的有效功率控制部20的功能构成的一例的框图。
22.图12是简要地表示图11所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
23.图13是表示第3实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
24.图14a是表示第4
‑
1实施方式的有效功率控制部20的功能构成的一例的框图。
25.图14b是表示第4
‑
2实施方式的有效功率控制部20的功能构成的一例的框图。
26.图15a是简要地表示图14a所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
27.图15b是简要地表示图14b所示的有效功率指令值运算部21x中的各部的信号波形
的例子的图。
28.图16a是表示第4
‑
1实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
29.图16b是表示第4
‑
2实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
30.图17a是表示第5
‑
1实施方式的有效功率控制部20的功能构成的一例的框图。
31.图17b是表示第5
‑
2实施方式的有效功率控制部20的功能构成的一例的框图。
32.图17c是表示第5
‑
3实施方式的有效功率控制部20的功能构成的一例的框图。
33.图17d是表示第5
‑
4实施方式的有效功率控制部20的功能构成的一例的框图。
34.图17e是表示第5
‑
5实施方式的有效功率控制部20的功能构成的一例的框图。
35.图17f是表示第5
‑
6实施方式的有效功率控制部20的功能构成的一例的框图。
36.图17g是表示第5
‑
7实施方式的有效功率控制部20的功能构成的一例的框图。
37.图17h是表示第5
‑
8实施方式的有效功率控制部20的功能构成的一例的框图。
38.图17i是表示第5
‑
9实施方式的有效功率控制部20的功能构成的一例的框图。
39.图17j是表示第5
‑
10实施方式的有效功率控制部20的功能构成的一例的框图。
40.图17k是表示第5
‑
11实施方式的有效功率控制部20的功能构成的一例的框图。
41.图18a是简要地表示图17a所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
42.图18b是简要地表示图17b所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
43.图18c是简要地表示图17c所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
44.图18d是简要地表示图17d所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
45.图18e是简要地表示图17e所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
46.图18f是简要地表示图17f所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
47.图18g是简要地表示图17g所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
48.图18h是简要地表示图17h所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
49.图18i是简要地表示图17i所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
50.图18j是简要地表示图17j所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
51.图18k是简要地表示图17k所示的有效功率指令值运算部21x中的各部的信号波形的例子的图。
52.图19a是表示第5
‑
1实施方式的生成第3有效功率指令值的处理顺序的一例的流程
图。
53.图19b是表示第5
‑
2实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
54.图19c是表示第5
‑
3实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
55.图19d是表示第5
‑
4实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
56.图19e是表示第5
‑
5实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
57.图19f是表示第5
‑
6实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
58.图19g是表示第5
‑
7的实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
59.图19h是表示第5
‑
8实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
60.图19i是表示第5
‑
9实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
61.图19j是表示第5
‑
10实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
62.图19k是表示第5
‑
11实施方式的生成第3有效功率指令值的处理顺序的一例的流程图。
63.图20是表示在图1的扬水发电设备中不输入“输出指令值”而输入“输入指令值”来进行控制的情况下的构成的一例的图。
64.图21是表示在图1的扬水发电设备中不在发电电动机的“二次侧”而在“一次侧”、“定子侧”或者“电枢侧”连接功率转换机构的情况下的构成的一例的图。
65.图22是表示在图20的扬水发电设备中不在发电电动机的“二次侧”而在“一次侧”、“定子侧”或者“电枢侧”连接功率转换机构的情况下的构成的一例的图。
具体实施方式
66.以下,参照附图对本发明的实施方式进行说明。
67.[第1实施方式]
[0068]
首先,对第1实施方式进行说明。
[0069]
图1是表示第1实施方式的扬水发电设备的构成的一例的图。该扬水发电设备是能够进行发电运转和扬水运转中的任一方的设备,但在本实施方式中,以与发电运转相关的构成以及动作为中心进行说明。
[0070]
图1所示的扬水发电设备1例如是具有变速功能的二次励磁方式的变速扬水发电设备、且是能够调整扬水输入和发电输出中的任一方的扬水发电设备。另外,也可以将该扬水发电设备1替代为不具有扬水功能的变速水力发电设备来实施。此外,也可以将该扬水发电设备1替代为将功率转换装置与发电电动机的一次侧、定子侧或者电枢侧连接的变速扬
水发电设备来实施。此外,也可以将该扬水发电设备1替代为将功率转换装置与发电机的一次侧、定子侧或者电枢侧连接的变速发电设备来实施。
[0071]
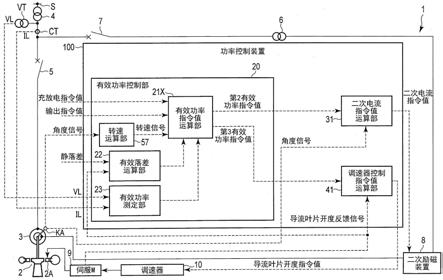
扬水发电设备1作为基本的构成要素,具备水泵水轮机2、发电电动机(旋转电机)3、与电力系统s电连接的主要变压器4、并联用断路器5、励磁用变压器6、励磁用断路器7、二次励磁装置(功率转换机构)8、伺服马达9、调速器(调速机构)10、角度检测器ka、计量仪器用变量器vt、变流器ct等设备类。
[0072]
水泵水轮机(原动机、流体机械)2包括水轮机功能和水泵功能。该水泵水轮机2为,在作为原动机(水轮机)动作时将水的能量转换成旋转能量,在作为流体机械(水泵)动作时将旋转能量转换成水的能量。发电电动机(旋转电机)3与水泵水轮机2机械地连接,在作为发电机动作时将该水泵水轮机2的旋转能量转换成电能并输出,在作为电动机动作时将电能转换成旋转能量并输出。
[0073]
此外,水泵水轮机2具备能够调整开度的导流叶片2a。导流叶片2a、伺服马达9以及调速器10构成对向水泵水轮机2流入的水流量进行调整的流量调整机构。调速器10包括:驱动伺服马达9的致动器,该伺服马达9使导流叶片2a动作;以及转换线圈,根据导流叶片开度指令值使上述致动器动作。此处,导流叶片开度指令值意味着指示将导流叶片打开例如
△△
%的导流叶片打开指令值、或者指示将导流叶片关闭例如
□□
%的导流叶片关闭指令值。
[0074]
在发电运转时,通过导流叶片2a来调整流量。但是,在扬水运转时,将导流叶片2a的开度调整为使效率变得良好。此时,导流叶片2a、伺服马达9以及调速器10不构成流量调整机构,而构成整流机构。
[0075]
二次励磁装置(功率转换机构)8是对发电电动机3的二次电流进行控制并对发电电动机3的输出(有效功率)或者转速进行控制的功率转换装置。
[0076]
此外,扬水发电设备1具备功率控制装置100。功率控制装置100向二次励磁装置8提供二次电流指令值,并且向调速器10提供调速控制指令值、即针对导流叶片2a的导流叶片开度指令值以及/或者开闭指令。该功率控制装置100具有有效功率控制部20、二次电流指令值运算部(功率转换控制指令值运算机构)31、调速器控制指令值运算部(调速控制指令值运算机构)41等各种控制功能。这些控制功能例如也可以作为由计算机执行的程序(软件)来实现。
[0077]
有效功率控制部20具有有效功率指令值运算部(有效功率指令值运算机构)21x、有效落差运算部22以及有效功率测定部23。
[0078]
有效功率指令值运算部21x为,输入从上位控制装置等向功率控制装置100供给的输出指令值(发电输出的指令值)和充放电指令值(充电或者放电的指令值),在使用这些指令值对第1有效功率指令值进行了运算的基础上,进一步对第2有效功率指令值以及第3有效功率指令值进行运算并输出。上述输出指令值以及上述充放电指令值,可以分别从不同的控制机构分开输送,也可以从相同的控制机构输送。
[0079]
该有效功率指令值运算部21x对二次电流指令值运算部31供给第2有效功率指令值,对调速器控制指令值运算部41供给第3有效功率指令值。
[0080]
有效落差运算部22为,输入从上位控制装置等供给的静落差和从伺服马达9供给的导流叶片开度反馈信号,使用这些对有效落差(有效落差计算值)进行运算并输出。另外,
有效落差的运算方法并不限定于该例子。例如,也可以通过不使用导流叶片开度反馈信号的其他运算方法对有效落差进行运算。
[0081]
有效功率测定部23为,输入从计量仪器用变量器vt以及变流器ct分别供给的电压vl以及电流il,使用这些求出有效功率测定值并输出。
[0082]
二次电流指令值运算部(功率转换控制指令值运算机构)31为,使用从有效功率指令值运算部21x供给的第2有效功率指令值以及从角度检测器ka供给的角度信号,对向二次励磁装置(功率转换机构)8提供的二次电流指令值(功率转换控制指令值)进行运算并输出。
[0083]
调速器控制指令值运算部(调速控制指令值运算机构)41为,使用从有效功率指令值运算部21x供给的第3有效功率指令值以及从伺服马达9供给的导流叶片开度反馈信号,对向调速器(调速机构)10提供的导流叶片开度指令值进行运算并输出。
[0084]
另外,功率控制装置100也可以具备如下的接口设备:输入从上位控制装置等(例如,系统运用公司管理的用于抑制频率变动的控制装置)供给的充放电指令值,根据需要将其调整为适合于有效功率控制部20内的有效功率指令值运算部21x中的处理的值并输出。
[0085]
此外,功率控制装置100也可以具备如下的接口设备:输入从上位控制装置等(例如,电力公司管理的用于控制发电输出的控制装置)供给的输出指令值,根据需要将其调整为适合于有效功率控制部20内的有效功率指令值运算部21x中的处理的值并输出。
[0086]
此外,功率控制装置100也可以具备如下的接口设备:输入从二次电流指令值运算部31输出的二次电流指令值,根据需要将其调整为适合于二次励磁装置8中的处理的值并输出。
[0087]
此外,功率控制装置100也可以具备如下的接口设备:输入从调速器控制指令值运算部41输出的导流叶片开度指令值,根据需要将其调整为适合于调速器10中的处理的值并输出。
[0088]
图2表示第1实施方式的有效功率控制部20的功能构成的一例。此外,图3表示图2所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图3是为了容易理解而将各部的信号波形模式化的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0089]
图2所示的有效功率指令值运算部21x作为各种功能而具有第1有效功率指令值运算部53、第2有效功率指令值运算部54、信号处理部(低通滤波器等信号处理机构)55、转速指令值运算部56、转速运算部57、转速偏差运算部58以及第3有效功率指令值运算部59。
[0090]
图3的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图3的(b)表示向第1有效功率指令值运算部53输入的输出指令值的信号波形的例子。图3的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54以及信号处理部55输入的第1有效功率指令值的信号波形的例子。
[0091]
图3的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图3的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0092]
图3的(j)表示从信号处理部55输出并向转速指令值运算部56输入的第1有效功率
指令值的信号波形(降低了高频分量的波形)的例子。图3的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图3的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图3的(h)表示从转速偏差运算部58输出并向第3有效功率指令值运算部59输入的转速偏差的信号波形的例子。图3的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号的波形的例子。图3的(i)中的第3有效功率指令值的信号波形与图3的(e)中的第2有效功率指令值的信号的波形相比,高频分量的振幅被降低。
[0093]
输出指令值一般以比充放电指令值长的周期缓慢地上下变化(频率比充放电指令值低)。另一方面,充放电指令值以比输出指令值短的周期上下快速地变化(频率比输出指令值高)。
[0094]
第2有效功率指令值包含上述那样的输出指令值的特征和充放电指令值的特征的双方。由此,发电电动机能够输出与输出指令值以及充放电指令值的双方相应的有效功率。另一方面,第3有效功率指令值包含输出指令值以及充放电指令值的特征,但充放电指令值的特征被抑制。在本例中,充放电指令值的高频分量被降低。由此,能够降低流量调整机构的无用动作。
[0095]
此处,对构成有效功率指令值运算部21x的各个功能进行说明。
[0096]
第1有效功率指令值运算部53使用充放电指令值以及输出指令值,对第1有效功率指令值进行运算并输出。该运算例如包含充放电指令值与输出指令值的加法运算。但是,并不限定于该例子。例如,在充放电指令值或者输出指令值被以负值表现的情况下,也存在不成为加法运算而成为减法运算的情况。此外,也存在优选在对充放电指令值或者输出指令值乘以一定的加权系数之后进行加法运算的情况。
[0097]
第2有效功率指令值运算部54使用从第1有效功率指令值运算部53输出的第1有效功率指令值以及从有效功率测定部23输出的有效功率测定值,对第2有效功率指令值进行运算并输出。在该运算中,例如,根据有效功率测定值和第1有效功率指令值,按照预先确定的规定的处理方法(数式、算法等)求出第1有效功率指令值的校正值并作为第2有效功率指令值输出。例如,在有效功率测定值小于第1有效功率指令值的情况下,输出正的校正值(增加有效功率的校正值)。在有效功率测定值大于第1有效功率指令值的情况下,输出负的校正值(减小有效功率的校正值)。如此,实现使用了有效功率测定值的有效功率指令值的反馈控制。
[0098]
信号处理部55生成从由第1有效功率指令值运算部53输出的第1有效功率指令值降低或者除去了规定频率以上或者超过规定频率的高频分量(第1有效功率指令值的高频分量)的信号并输出。该信号处理部55例如使用低通滤波器或者计算移动平均的机构等来实现。
[0099]
转速指令值运算部56使用从信号处理部55输出的降低或者除去了高频分量的信号以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出。
[0100]
转速运算部57输入从角度检测器ka供给的角度信号并通过运算求出转速测定值,且根据需要将其转换成适合于有效功率指令值运算部21x内的处理的信号并输出。图1是根据来自角度检测器ka的角度信号通过运算求出转速的例子,但也可以代替角度检测器ka而
设置转速检测机构,代替转速运算部57而设置转速输入部,来检测转速。此外,也可以检测角度信号以外的信号(例如电压的频率),并根据该信号通过运算求出转速。
[0101]
转速偏差运算部58将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出。
[0102]
第3有效功率指令值运算部59使用从转速偏差运算部58输出的转速偏差,对第3有效功率指令值进行运算。在该运算中,例如,根据转速偏差,通过预先确定的规定的信号处理方法(数式、算法等)求出有效功率指令值的校正值,并作为第3有效功率指令值(导流叶片开度指令值)输出。例如,在转速偏差为正(转速测定值小于转速指令值)的情况下,输出正的校正值(增大导流叶片开度的校正值),在转速偏差为负(转速测定值大于转速指令值)的情况下,输出负的校正值(减小导流叶片开度的校正值)。如此,实现使用了转速偏差的有效功率指令值的反馈控制。
[0103]
接着,参照图4a的流程图对图1以及图2所示的有效功率控制部20内的有效功率指令值运算部21x的动作的一例进行说明。
[0104]
如图4a所示,有效功率指令值运算部21x首先生成第1有效功率指令值(步骤s1),接着,使用该第1有效功率指令值而生成第2有效功率指令值以及第3有效功率指令值(步骤s2)。
[0105]
接着,参照图4b的流程图对图1所示的二次电流指令值运算部(功率转换控制指令值运算机构)31的动作的一例进行说明。
[0106]
如图4b所示,二次电流指令值运算部31输入从有效功率指令值运算部21x供给的第2有效功率指令值,并且输入从角度检测器ka供给的角度信号(步骤s3)。接着,二次电流指令值运算部31使用所输入的第2有效功率指令值以及角度信号,对向二次励磁装置(功率转换机构)8提供的二次电流指令值(功率转换控制指令值)进行运算并输出(步骤s4)。
[0107]
接着,参照图4c的流程图对图1所示的调速器控制指令值运算部(调速控制指令值运算机构)41的动作的一例进行说明。
[0108]
如图4c所示,调速器控制指令值运算部41输入从有效功率指令值运算部21x供给的第3有效功率指令值,并且输入从伺服马达9供给的导流叶片开度反馈信号(步骤s5)。接着,调速器控制指令值运算部41使用所输入的第3有效功率指令值以及导流叶片开度反馈信号,对向调速器(调速机构)10提供的导流叶片开度指令值进行运算并输出(步骤s6)。
[0109]
图5表示生成第1有效功率指令值的处理顺序的一例。
[0110]
有效功率指令值运算部21x输入从上位控制装置等供给的输出指令值,并且输入从上位控制装置等供给的充放电指令值(步骤s11)。
[0111]
接着,有效功率指令值运算部21x通过第1有效功率指令值运算部53使用输出指令值以及充放电指令值对第1有效功率指令值进行运算(步骤s12)。
[0112]
图6表示生成第2有效功率指令值的处理顺序的一例。
[0113]
有效功率指令值运算部21x输入有效功率测定部23求出的有效功率测定值(步骤s21)。
[0114]
接着,有效功率指令值运算部21x通过第2有效功率指令值运算部54使用该输入的有效功率测定值以及从第1有效功率指令值运算部53输出的第1有效功率指令值,对第2有效功率指令值进行运算,并输出所运算出的第2有效功率指令值(步骤s22)。
[0115]
图7表示生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0116]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57对从角度检测器ka供给的角度信号进行运算并输出的转速测定值(步骤s31)。
[0117]
接着,有效功率指令值运算部21x通过信号处理部(低通滤波器等信号处理机构)55,生成从由第1有效功率指令值运算部53输出的第1有效功率指令值降低或者除去了规定频率以上或者超过规定频率的高频分量(第1有效功率指令值的高频分量)的信号(步骤s32)。
[0118]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用从信号处理部55输出的降低或者除去了高频分量的信号以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33)。
[0119]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34)。
[0120]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用从转速偏差运算部58输出的转速偏差,对第3有效功率指令值进行运算,并输出所运算出的第3有效功率指令值(步骤s35)。
[0121]
根据第1实施方式,在功率控制装置100中,输入输出指令值并且还输入充放电指令值,并根据追随该输出指令值以及充放电指令值的双方的变化而变化的二次电流指令值以及导流叶片开度指令值,分别控制二次励磁装置8以及调速器10,因此能够进行与输出指令值以及充放电指令值相应的发电电动机3以及水泵水轮机2的运转。
[0122]
此外,根据第1实施方式,从有效功率控制部20内的有效功率指令值运算部21x向二次电流指令值运算部31供给的第2有效功率指令值包含输出指令值的特征以及充放电指令值的特征的双方,与此相对,从有效功率控制部20内的有效功率指令值运算部21x向调速器控制指令值运算部41供给的第3有效功率指令值,虽然包含输出指令值的特征以及充放电指令值的特征的双方,但通过信号处理部55降低了充放电指令值的高频分量,因此能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0123]
[第2实施方式]
[0124]
接着,对第2实施方式进行说明。以下,省略与上述第1实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0125]
另外,上述图1所示的构成也可以应用于该第2实施方式。第2实施方式的功率控制装置100的基本构成也与图1所示的基本构成相同。
[0126]
图8表示第2实施方式的有效功率控制部20的功能构成的一例。另外,在图8中,对具有与图2所示的第1实施方式的有效功率控制部20相同的功能的要素标注相同的标号。此外,图9简要地表示图8所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图9是为了容易理解而将各部的信号的波形模式化的图,与实际的信号波形不同。此外,
也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0127]
该第2实施方式的有效功率控制部20(图8)与上述第1实施方式的有效功率控制部20(图2)的不同点在于,在有效功率指令值运算部21x中未设置上述信号处理部(低通滤波器等信号处理机构)55,取而代之,在将转速偏差运算部58与第3有效功率指令值运算部59连结的路径上设置有信号处理部(低通滤波器等信号处理机构)62等。
[0128]
图9的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图9的(b)表示向第1有效功率指令值运算部53输入的输出指令值的信号波形的例子。图9的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54以及转速指令值运算部56输入的第1有效功率指令值的信号波形的例子。
[0129]
图9的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图9的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0130]
图9的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图9的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图9的(h)表示从转速偏差运算部58输出并向信号处理部62输入的转速偏差的信号波形的例子。图9的(j)表示减少了从信号处理部62输出并向第3有效功率指令值运算部59输入的转速偏差的高频分量的信号波形的例子。图9的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。与图9的(e)的第2有效功率指令值的信号的波形相比,图9的(i)的第3有效功率指令值的信号的波形被降低了短周期分量的振幅。
[0131]
在第2实施方式中,转速指令值运算部56使用从第1有效功率指令值运算部53输出的第1有效功率指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出。
[0132]
信号处理部62生成从由转速偏差运算部58输出的转速偏差降低或者除去了规定频率以上或者超过规定频率的高频分量(转速偏差的高频分量)的信号并输出。该信号处理部62例如使用低通滤波器或者计算移动平均的机构等来实现。
[0133]
第3有效功率指令值运算部59使用从信号处理部62输出的降低或者除去了转速偏差的高频分量的信号,对第3有效功率指令值进行运算。在该运算中,例如,根据降低或者除去了转速偏差的高频分量的信号,按照预先确定的规定的处理方法(数式、算法等)来求出有效功率指令值的校正值并作为第3有效功率指令值(导流叶片开度指令值)输出。例如,在转速偏差为正(转速测定值小于转速指令值)的情况下,增大有效功率指令值,在转速偏差为负(转速测定值大于转速指令值)的情况下,减小有效功率指令值。如此,实现使用了减小或者除去了转速偏差的高频分量的信号的有效功率指令值的反馈控制。
[0134]
接着,参照流程图对图8所示的有效功率控制部20内的有效功率指令值运算部21x的动作的一例进行说明。
[0135]
另外,上述图4a至图6所示的处理顺序也可以应用于该第2实施方式。第2实施方式的有效功率指令值运算部21x的基本动作与图4a所示的基本动作相同。此外,生成第1有效功率指令值的处理顺序以及生成第2有效功率指令值的处理顺序也与图5以及图6所示的处
理顺序相同。
[0136]
生成第3有效功率指令值的处理顺序与第1实施方式的情况不同。
[0137]
图10表示第2实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0138]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0139]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用从第1有效功率指令值运算部53输出的第1有效功率指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33a)。
[0140]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34)。
[0141]
接着,有效功率指令值运算部21x通过信号处理部(低通滤波器等信号处理机构)62,生成从由转速偏差运算部58输出的转速偏差降低或者除去了规定频率以上或者超过规定频率的高频分量(转速偏差的高频分量)的信号(步骤s41)。
[0142]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用从信号处理部62输出的降低或者除去了转速偏差的高频分量的信号,对第3有效功率指令值进行运算,并输出所运算出的第3有效功率指令值(步骤s35a)。
[0143]
根据第2实施方式,也可以不在将第1有效功率指令值运算部53与转速指令值运算部56连结的路径上设置上述信号处理部55,而从第1有效功率指令值运算部53不降低充放电指令值的高频分量地传递至转速指令值运算部56,但由于在将转速偏差运算部58与第3有效功率指令值运算部59连结的路径上设置有信号处理部62,因此能够将高频分量较少的第3有效功率指令值供给至调速器控制指令值运算部41,能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0144]
[第3实施方式]
[0145]
接着,对第3实施方式进行说明。以下,省略与上述第1实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0146]
另外,上述图1所示的构成也可以应用于该第3实施方式。第3实施方式的功率控制装置100的基本构成与图1所示的基本构成相同。
[0147]
图11表示第3实施方式的有效功率控制部20的功能构成的一例。另外,在图11中,对具有与图2所示的第1实施方式的有效功率控制部20相同的功能的要素标注相同的标号。此外,图12简要地表示图11所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图12是为了容易理解而将各部的信号波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0148]
该第3实施方式的有效功率控制部20(图11)与上述第1实施方式的有效功率控制部20(图2)的不同点在于,在有效功率指令值运算部21x中未设置上述信号处理部(低通滤
波器等信号处理机构)55,以及转速指令值运算部56输入输出指令值等。
[0149]
图12的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图12的(b)表示向第1有效功率指令值运算部53以及转速指令值运算部56输入的输出指令值的信号波形的例子。图12的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0150]
图12的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图12的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0151]
图12的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图12的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图12的(h)表示从转速偏差运算部58输出并向第3有效功率指令值运算部59输入的转速偏差的信号波形的例子。图12的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。
[0152]
在第3实施方式中,转速指令值运算部56使用从第1有效功率指令值运算部53输出的第1有效功率指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出。
[0153]
接着,参照流程图对图11所示的有效功率控制部20内的有效功率指令值运算部21x的动作的一例进行说明。
[0154]
另外,上述图4a至图6所示的处理顺序也可以应用于该第3实施方式。第3实施方式的有效功率指令值运算部21x的基本动作与图4a所示的基本动作相同。此外,生成第1有效功率指令值的处理顺序以及生成第2有效功率指令值的处理顺序与图5以及图6所示的处理顺序相同。
[0155]
生成第3有效功率指令值的处理顺序与第1以及第2实施方式的情况不同。
[0156]
图13表示第3实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0157]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0158]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0159]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34)。
[0160]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用从转速偏差运算部58输出的转速偏差,对第3有效功率指令值进行运算,并输出所运算出的第3有效功率指令值(步骤s35)。
[0161]
根据第3实施方式,没有上述信号处理部55以及设置有该信号处理部55的路径,因
此充放电指令值的信息不直接反映到第3有效功率指令值。但是,根据基于包含充放电指令值的第2有效功率指令值的控制结果(发电电动机的输出)与基于第3有效功率指令值的控制结果(水泵水轮机的输出)之差的积分值而转速变化,因此转速指令值与转速测定值产生偏差,转速偏差被输入至第3有效功率指令值运算部59,作为结果而充放电指令值的低频分量被反映到第3有效功率指令值。根据第3实施方式,能够省略信号处理部55(低通滤波器等)而抑制成本,并且能够实现与充放电指令值相应的发电电动机3的运转,并且能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0162]
[第4
‑
1实施方式]
[0163]
接着,对第4
‑
1实施方式进行说明。以下,省略与上述第3实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0164]
另外,上述图1所示的构成也可以应用于该第4
‑
1实施方式。第4
‑
1实施方式的功率控制装置100的基本构成与图1所示的基本构成相同。
[0165]
图14a表示第4
‑
1实施方式的有效功率控制部20的功能构成的一例。另外,在图14a中,对具有与图11所示的第3实施方式的有效功率控制部20相同的功能的要素标注相同的标号。此外,图15a简要地表示图14a所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图15a是为了容易理解而将各部的信号波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0166]
该第4
‑
1实施方式的有效功率控制部20(图14a)与上述第3实施方式的有效功率控制部20(图11)的不同点在于,在将转速偏差运算部58与第3有效功率指令值运算部59连结的路径上设置有信号处理部(低通滤波器等信号处理机构)62等。该信号处理部62具有与在第2实施方式中说明过的图8中的信号处理部62相同的功能。
[0167]
图15a的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图15a的(b)表示向第1有效功率指令值运算部53以及转速指令值运算部56输入的输出指令值的信号波形的例子。图15a的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0168]
图15a的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图15a的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0169]
图15a的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图15a的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图15a的(h)表示从转速偏差运算部58输出并向信号处理部62输入的转速偏差的信号波形的例子。图15a的(j)表示从信号处理部62输出并向第3有效功率指令值运算部59输入的降低了转速偏差的高频分量的信号波形的例子。图15a的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。
[0170]
在第4
‑
1实施方式中,信号处理部62从由转速偏差运算部58输出的转速偏差降低或者除去了规定频率以上或者超过规定频率的高频分量(转速偏差的高频分量)并输出。该
信号处理部62例如使用低通滤波器或者计算移动平均的机构等来实现。
[0171]
第3有效功率指令值运算部59使用从信号处理部62输出的降低或者除去了转速偏差的高频分量的信号,对第3有效功率指令值进行运算。在该运算中,例如,根据降低或者除去了转速偏差的高频分量的信号,按照预先确定的规定的处理方法(数式、算法等)求出有效功率指令值的校正值并作为第3有效功率指令值输出。如此,实现使用了降低或者除去了转速偏差的高频分量的信号的有效功率指令值的反馈控制。
[0172]
接着,参照流程图对图14a所示的有效功率控制部20内的有效功率指令值运算部21x的动作的一例进行说明。
[0173]
另外,上述图4a至图6所示的处理顺序也可以应用于该第4
‑
1实施方式。第4
‑
1实施方式的有效功率指令值运算部21x的基本动作与图4a所示的基本构成相同。此外,生成第1有效功率指令值的处理顺序以及生成第2有效功率指令值的处理顺序也与图5以及图6所示的处理顺序相同。
[0174]
生成第3有效功率指令值的处理顺序与第1至第3实施方式的情况不同。
[0175]
图16a表示第4
‑
1实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0176]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0177]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0178]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34)。
[0179]
接着,有效功率指令值运算部21x通过信号处理部(低通滤波器等信号处理机构)62,生成从由转速偏差运算部58输出的转速偏差降低或者除去了规定频率以上或者超过规定频率的高频分量(转速偏差的高频分量)的信号(步骤s41)。
[0180]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用从信号处理部62输出的减少或者除去了转速偏差的高频分量的信号,对第3有效功率指令值进行运算,并输出所运算出的第3有效功率指令值(步骤s35a)。
[0181]
根据第4
‑
1实施方式,未设置将上述信号处理部55以及第1有效功率指令值运算部53与转速指令值运算部56连结的路径,因此充放电指令值的信息未反映到第3有效功率指令值。但是,根据基于包含充放电指令值的第2有效功率指令值的控制结果(发电电动机的输出)与基于第3有效功率指令值的控制结果(水泵水轮机的输出)之差的积分值而转速变化,因此转速指令值与转速测定值产生偏差,转速偏差被输入至第3有效功率指令值运算部59,作为结果,充放电指令值的低频分量被反映到第3有效功率指令值。根据第4
‑
1实施方式,能够实现与充放电指令值相应的发电电动机3的运转,并且能够将与第3实施方式相比高频分量更少的第3有效功率指令值供给至调速器控制指令值运算部41,能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作
等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0182]
[第4
‑
2实施方式]
[0183]
接着,对第4
‑
2实施方式进行说明。以下,省略与上述第4
‑
1实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0184]
图14b表示第4
‑
2实施方式的有效功率控制部20的功能构成的一例。此外,图15b表示图14b所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图15b是为了容易理解而将各部的信号波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0185]
在上述第4
‑
1实施方式中,对在将转速偏差运算部58与第3有效功率指令值运算部59连结的路径上设置有信号处理部(低通滤波器等)62的例子进行了说明,但在该第4
‑
2实施方式中,在将转速运算部57与转速偏差运算部58连结的路径上设置有信号处理部62。如此也能够得到相同的效果。
[0186]
图15b的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图15b的(b)表示向第1有效功率指令值运算部53以及转速指令值运算部56输入的输出指令值的信号波形的例子。图15b的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0187]
图15b的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图15b的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0188]
图15b的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图15b的(g)表示从转速运算部57向信号处理部62输入的转速测定值的信号波形的例子。图15b的(j)表示从信号处理部62输出并向转速偏差运算部58输入的降低了转速偏差的高频分量的信号波形的例子。图15b的(h)表示从转速偏差运算部58输出并向第3有效功率指令值运算部59输入的转速偏差的信号波形的例子。图15b的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。
[0189]
在第4
‑
2实施方式中,信号处理部62从由转速运算部57输出的转速测定值降低或者除去了规定频率以上或者超过规定频率的高频分量(转速测定值的高频分量)并输出。该信号处理部62例如使用低通滤波器或者计算移动平均的机构等来实现。
[0190]
图16b表示第4
‑
2实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0191]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0192]
接着,有效功率指令值运算部21x通过信号处理部(低通滤波器等信号处理机构)62,生成从由转速运算部57输出的转速测定值降低或者除去规定频率以上或者超过规定频率的高频分量的信号(步骤s32b)。
[0193]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及
从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0194]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从信号处理部62输出的降低或者除去了高频分量的信号进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34a)。
[0195]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用从转速偏差运算部58输出的转速偏差,对第3有效功率指令值进行运算,并输出所运算出的第3有效功率指令值(步骤s35)。
[0196]
根据第4
‑
2实施方式,能够得到与上述第4
‑
1实施方式相同的效果。
[0197]
[第5
‑
1实施方式]
[0198]
接着,对第5
‑
1实施方式进行说明。以下,省略与上述第3实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0199]
另外,上述图1所示的构成也可以应用于该第5
‑
1实施方式。第5
‑
1实施方式的功率控制装置100的基本构成与图1所示的基本构成相同。
[0200]
图17a表示第5
‑
1实施方式的有效功率控制部20的功能构成的一例。另外,在图17a中,对具有与图11所示的第3实施方式的有效功率控制部20相同的功能的要素标注相同的标号。此外,图18a表示图17a所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图18a是为了容易理解而将各部的信号波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0201]
该第5
‑
1实施方式的有效功率控制部20(图17a)与上述第3实施方式的有效功率控制部20(图11)的不同点在于,在将转速偏差运算部58与第3有效功率指令值运算部59连结的路径上设置有信号处理部62(低通滤波器等),以及第3有效功率指令值运算部59输入输出指令值并且作为第3有效功率指令值运算的校正信号而输入从信号处理部62输出的信号等。
[0202]
图18a的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图18a的(b)表示向第1有效功率指令值运算部53、转速指令值运算部56以及第3有效功率指令值运算部59输入的输出指令值的信号波形的例子。图18a的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0203]
图18a的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图18a的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0204]
图18a的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图18a的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图18a的(h)表示从转速偏差运算部58输出并向信号处理部62输入的转速偏差的信号波形的例子。图18a的(j)表示从信号处理部62输出并向第3有效功率指令值运算部59输入的校正信号的波形的例子。图18a的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号
波形的例子。
[0205]
在第5
‑
1实施方式中,信号处理部62生成从由转速偏差运算部58输出的转速偏差降低或者除去了规定频率以上或者超过规定频率的高频分量(转速偏差的高频分量)的信号,并将该信号作为用于对第3有效功率指令值运算部59生成的信号(向调速器控制指令值运算部41供给的第3有效功率指令值)进行校正的校正信号(有效功率指令值校正信号)而输出。该信号处理部62例如可以使用低通滤波器或者计算移动平均的机构等来实现,也可以使用这些以外的机构来实现。
[0206]
第3有效功率指令值运算部59使用输出指令值,生成向调速器控制指令值运算部41供给的第3有效功率指令值,使用从信号处理部62输出的信号对该第3有效功率指令值进行校正,并输出校正后的结果。
[0207]
接着,参照流程图对图17a所示的有效功率控制部20内的有效功率指令值运算部21x的动作的一例进行说明。
[0208]
另外,上述图4a至图6所示的处理顺序也可以应用于该第5
‑
1实施方式。第5
‑
1实施方式的有效功率指令值运算部21x的基本动作与图4a所示的基本动作相同。此外,生成第1有效功率指令值的处理顺序以及生成第2有效功率指令值的处理顺序与图5以及图6所示的处理顺序相同。
[0209]
生成第3有效功率指令值的处理顺序与第1至第4
‑
2实施方式的情况不同。
[0210]
图19a表示第5
‑
1实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0211]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0212]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0213]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34)。
[0214]
接着,有效功率指令值运算部21x通过信号处理部62,生成从由转速偏差运算部58输出的转速偏差降低或者除去了规定频率以上或者超过规定频率的高频分量(转速偏差的高频分量)的信号,并将该信号作为有效功率指令值校正信号而输出(步骤s41a)。
[0215]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用输出指令值来生成向调速器控制指令值运算部41供给的第3有效功率指令值,使用从信号处理部62输出的有效功率指令值校正信号对该第3有效功率指令值进行校正,并输出校正后的结果(步骤s35b)。
[0216]
根据第5
‑
1实施方式,其构成为,输出指令值被直接供给至第3有效功率指令值运算部59,由有效功率指令值校正信号校正而作为第3有效功率指令值输出,因此能够提高第3有效功率指令值的控制的响应性。此外,与第4
‑
1、第4
‑
2实施方式的情况相同,能够实现与充放电指令值相应的发电电动机3的运转,并且能够将高频分量较少的第3有效功率指令值
供给至调速器控制指令值运算部41,能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0217]
[第5
‑
2实施方式]
[0218]
接着,对第5
‑
2实施方式进行说明。以下,省略与上述第5
‑
1实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0219]
图17b表示第5
‑
2实施方式的有效功率控制部20的功能构成的一例。此外,图18b表示图17b所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图18b是为了容易理解而将各部的信号波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0220]
在上述第5
‑
1实施方式中,对在将转速偏差运算部58与第3有效功率指令值运算部59连结的路径上设置有信号处理部62(低通滤波器等)的例子进行了说明,但在该第5
‑
2实施方式中,在将转速运算部57与转速偏差运算部58连结的路径上设置信号处理部62(低通滤波器等)。如此也能够得到与第5
‑
1实施方式相同的效果。
[0221]
图18b的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图18b的(b)表示向第1有效功率指令值运算部53、转速指令值运算部56以及第3有效功率指令值运算部59输入的输出指令值的信号波形的例子。图18b的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0222]
图18b的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图18b的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0223]
图18b的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图18b的(g)表示从转速运算部57向信号处理部(低通滤波器等)62输入的转速测定值的信号波形的例子。图18b的(j)表示从信号处理部62输出并向转速偏差运算部58输入的校正信号的波形的例子。图18b的(h)表示从转速偏差运算部58输出并向第3有效功率指令值运算部59输入的转速偏差的信号波形的例子。图18b的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。
[0224]
在第5
‑
2实施方式中,信号处理部62从由转速运算部57输出的转速测定值降低或者除去了规定频率以上或者超过规定频率的高频分量(转速测定值的高频分量)并输出。该信号处理部62例如使用低通滤波器或者计算移动平均的机构等来实现。
[0225]
图19b表示第5
‑
2实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0226]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0227]
接着,有效功率指令值运算部21x通过信号处理部(低通滤波器等信号处理机构)
62,生成从由转速运算部57输出的转速测定值降低或者除去了规定频率以上或者超过规定频率的高频分量的信号(步骤s32b)。
[0228]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0229]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从信号处理部62输出的降低或者除去了高频分量的信号进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34a)。
[0230]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用输出指令值来生成向调速器控制指令值运算部41供给的第3有效功率指令值,使用从转速偏差运算部58输出的转速偏差对该第3有效功率指令值进行校正,并输出校正后的结果(步骤s35c)。
[0231]
根据第5
‑
2实施方式,能够得到与上述第5
‑
1实施方式相同的效果。
[0232]
[第5
‑
3~第5
‑
7的实施方式]
[0233]
接着,对第5
‑
3、第5
‑
4、第5
‑
5、第5
‑
6、第5
‑
7实施方式(以下,称作“第5
‑
3~第5
‑
7实施方式”)进行说明。以下,省略与上述第3实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0234]
另外,上述图1所示的构成也可以应用于该第5
‑
3~第5
‑
7实施方式。第5
‑
3~第5
‑
7实施方式的功率控制装置100的基本构成与图1所示的基本构成相同。
[0235]
图17c~图17g表示第5
‑
3~第5
‑
7实施方式的有效功率控制部20的功能构成的一例。另外,在图17c~图17g中,对具有与图11所示的第3实施方式的有效功率控制部20相同的功能的要素标注相同的标号。此外,图18c~图18g简要地表示图17c~图17g所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图18c~图18g是为了容易理解而将各部的信号波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0236]
该第5
‑
3~第5
‑
7实施方式的有效功率控制部20(图17c~图17g)与上述第5
‑
1实施方式的有效功率控制部20(图17a)的不同点在于,有效功率控制部20输入充放电指令值的部分,以及在将第1有效功率指令值运算部53、第2有效功率指令值运算部54、转速偏差运算部58或者转速运算部57与第3有效功率指令值运算部59连结的路径上设置有效功率指令值校正部64。
[0237]
图18c~图18g的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图18c~图18g的(b)表示向第1有效功率指令值运算部53、转速指令值运算部56以及第3有效功率指令值运算部59输入的输出指令值的信号波形的例子。图18c~图18g的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0238]
图18c~图18g的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图18c~图18g的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信
号波形的例子。
[0239]
图18c~图18g的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图18c~图18g的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图18c~图18g的(h)表示从转速偏差运算部58输出并向第3有效功率指令值运算部59输入的转速偏差的信号波形的例子。图18c~图18g的(j)表示从有效功率指令值校正部64输出并向第3有效功率指令值运算部59输入的校正信号的波形的例子。图18c~图18g的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。
[0240]
在第5
‑
3~第5
‑
7实施方式中,有效功率指令值校正部64将充放电指令值的信号或者第1有效功率指令值运算部53、第2有效功率指令值运算部54、转速偏差运算部58或者转速运算部57的输出信号,作为用于对第3有效功率指令值运算部59生成的信号(向调速器控制指令值运算部41供给的第3有效功率指令值)进行校正的校正信号(有效功率指令值校正信号)而输出。该有效功率指令值校正部64例如可以使用高通滤波器等来实现,也可以使用除此以外的机构来实现。
[0241]
第3有效功率指令值运算部59使用输出指令值,生成向调速器控制指令值运算部41供给的第3有效功率指令值,使用从有效功率指令值校正部64输出的有效功率指令值校正信号以及从转速偏差运算部58输出的转速偏差信号对该第3有效功率指令值进行校正,并输出校正后的结果。
[0242]
图19c~图19g表示第5
‑
3~第5
‑
7实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0243]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0244]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0245]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算并输出(步骤s34)。
[0246]
接着,有效功率指令值运算部21x通过有效功率指令值校正部64,生成从充放电指令值、由第1有效功率指令值运算部53输出的第1有效功率指令值、由第2有效功率指令值运算部54输出的第2有效功率指令值、由转速偏差运算部58输出的转速偏差或者由转速运算部57输出的转速测定值,降低或者除去了规定频率以下或者小于规定频率的低频分量的信号,并将该信号作为有效功率指令值校正信号而输出(步骤s41b、s41c、s41d、s41e或者s41f)。
[0247]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用输出指令值,生成向调速器控制指令值运算部41供给的第3有效功率指令值,使用从有效功率指令值校正部64输出的有效功率指令值校正信号以及从转速偏差运算部58输出的转速偏差信号对该第3有效功率指令值进行校正,并输出校正后的结果(步骤s35c)。
[0248]
根据第5
‑
3~第5
‑
7实施方式,其构成为,输出指令值被直接供给至第3有效功率指令值运算部59,由有效功率指令值校正信号校正而作为第3有效功率指令值而输出,因此能够提高控制的响应性。此外,与第4实施方式的情况相同,能够实现与充放电指令值相应的发电电动机3的运转,并且能够将高频分量较少的第3有效功率指令值供给至调速器控制指令值运算部41,能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0249]
[第5
‑
8~第5
‑
11实施方式]
[0250]
接着,对第5
‑
8、第5
‑
9、第5
‑
10、第5
‑
11实施方式(以下,称作“第5
‑
8~第5
‑
11实施方式”)进行说明。以下,省略与上述第5
‑
3~第5
‑
7实施方式共通的部分的说明,以不同的部分为中心进行说明。
[0251]
另外,上述图1所示的构成也可以应用于该第5
‑
8~第5
‑
11实施方式。第5
‑
8~第5
‑
11实施方式的功率控制装置100的基本构成与图1所示的基本构成相同。
[0252]
图17h~图17k表示第5
‑
8~第5
‑
11实施方式的有效功率控制部20的功能构成的一例。另外,在图17h~图17k中,对具有与图11所示的第3实施方式的有效功率控制部20相同的功能的要素标注相同的标号。此外,图18h~图18k简要地表示图17h~图17k所示的有效功率指令值运算部21x中的各部的信号波形的例子。但是,图18h~图18k是为了容易理解而将各部的信号的波形模式化了的图,与实际的信号波形不同。此外,也可以不在有效功率指令值运算部21x内部将信号转换成波形,而保持模拟信号以及/或者数字信号不变地进行处理。
[0253]
该第5
‑
8~第5
‑
11实施方式的有效功率控制部20(图17h~图17k)与上述第5
‑
3~第5
‑
7实施方式的有效功率控制部20(图17c~图17g)的不同点在于,代替有效功率指令值校正部64而设置转速偏差校正部65,转速偏差校正部65的输出向转速偏差运算部58输入。
[0254]
图18h~图18k的(a)表示向第1有效功率指令值运算部53输入的充放电指令值的信号波形的例子。图18h~图18k的(b)表示向第1有效功率指令值运算部53、转速指令值运算部56以及第3有效功率指令值运算部59输入的输出指令值的信号波形的例子。图18h~图18k的(c)表示从第1有效功率指令值运算部53输出并向第2有效功率指令值运算部54输入的第1有效功率指令值的信号波形的例子。
[0255]
图18h~图18k的(d)表示从有效功率测定部23输出并向第2有效功率指令值运算部54输入的有效功率测定值的信号波形的例子。图18h~图18k的(e)表示从第2有效功率指令值运算部54输出并向图1中的二次电流指令值运算部31供给的第2有效功率指令值的信号波形的例子。
[0256]
图18h~图18k的(f)表示从转速指令值运算部56输出并向转速偏差运算部58输入的转速指令值的信号波形的例子。图18h~图18k的(g)表示从转速运算部57向转速偏差运算部58输入的转速测定值的信号波形的例子。图18h~图18k的(h)表示从转速偏差运算部58输出并向第3有效功率指令值运算部59输入的转速偏差的信号波形的例子。图18h~图18k的(j)表示从转速偏差校正部65输出并向转速偏差运算部58输入的校正信号的波形的例子。图18h~图18k的(i)表示从第3有效功率指令值运算部59输出并向图1中的调速器控制指令值运算部41供给的第3有效功率指令值的信号波形的例子。
[0257]
在第5
‑
8~第5
‑
11实施方式中,转速偏差校正部65生成从充放电指令值的信号或者由第1有效功率指令值运算部53、第2有效功率指令值运算部54或者转速运算部57的输出信号,降低或者除去了规定频率以下或者小于规定频率的低频分量(充放电指令值的低频信号分量)的信号,并将该信号作为用于对转速偏差运算部58生成的信号(向第3有效功率指令值运算部59供给的转速偏差信号)进行校正的校正信号(转速偏差校正信号)而输出。该转速偏差校正部65例如可以使用高通滤波器来实现,也可以使用高通滤波器以外的机构来实现。
[0258]
转速偏差运算部58使用从转速指令值运算部56输出的转速指令值和从转速运算部57输出的转速测定值,生成向第3有效功率指令值运算部59供给的转速偏差信号,使用从转速偏差校正部65输出的转速偏差校正信号对该转速偏差信号进行校正,并输出校正后的结果。
[0259]
图19h~图19k表示第5
‑
8~第5
‑
11实施方式的生成第3有效功率指令值的处理顺序的一例。另外,生成第3有效功率指令值的动作并不一定需要按照此处记载的步骤的编号顺序来执行。几个处理也可以改变顺序地执行或者同时执行。
[0260]
有效功率指令值运算部21x输入由有效落差运算部22运算并输出的有效落差(有效落差计算值),并且输入由转速运算部57运算并输出的转速测定值(步骤s31)。
[0261]
接着,有效功率指令值运算部21x通过转速偏差校正部65,生成从充放电指令值、由第1有效功率指令值运算部53输出的第1有效功率指令值、由第2有效功率指令值运算部54输出的第2有效功率指令值或者由转速运算部57输出的转速测定值,降低或者除去了规定频率以下或者小于规定频率的低频分量的信号,并将该信号作为转速偏差校正信号而输出(步骤s41g、s41h、s41i或者s41j)。
[0262]
接着,有效功率指令值运算部21x通过转速指令值运算部56,使用输出指令值以及从有效落差运算部22输出的有效落差计算值,对针对作为原动机动作的水泵水轮机2的转速指令值进行运算并输出(步骤s33b)。
[0263]
接着,有效功率指令值运算部21x通过转速偏差运算部58,将从转速指令值运算部56输出的转速指令值与从转速运算部57输出的转速测定值进行比较,对双方的偏差(转速偏差)进行运算,使用从转速偏差校正部65输出的转速偏差校正信号对该转速偏差进行校正,并输出校正后的转速偏差(步骤s34a)。
[0264]
接着,有效功率指令值运算部21x通过第3有效功率指令值运算部59,使用输出指令值,生成向调速器控制指令值运算部41供给的第3有效功率指令值,使用从转速偏差运算部58输出的校正后的转速偏差对该第3有效功率指令值进行校正,并输出校正后的结果(步骤s35d)。
[0265]
根据第5
‑
8~第5
‑
11实施方式,其构成为,输出指令值被直接供给至第3有效功率指令值运算部59,由有效功率指令值校正信号校正而作为第3有效功率指令值输出,因此能够提高控制的响应性。此外,与第4
‑
1、第4
‑
2实施方式的情况相同,能够实现与充放电指令值相应的发电电动机3的运转,并且能够将高频分量较少的第3有效功率指令值供给至调速器控制指令值运算部41,能够降低通过导流叶片开度指令值控制的流量调整机构的无用动作(高频度地重复的导流叶片的开闭动作等),能够实现水路等的水压变动的降低、流量调整机构的长寿命化。
[0266]
[其他]
[0267]
在上述第1至第5的实施方式中,例示了二次电流指令值运算部31以及调速器控制指令值运算部41设置于功率控制装置100的情况,但并不限定于该例子。例如,二次电流指令值运算部31可以设置于功率控制装置100之外(二次励磁装置8等),此外,调速器控制指令值运算部41也可以设置于功率控制装置100之外(调速器10等)。
[0268]
在上述第1至第5
‑
11实施方式中,说明了在发电运转中,图1中的功率控制装置100输入“输出指令值”(发电输出的指令值)来进行控制的情况,但在扬水发电设备的扬水运转、扬水设备的扬水运转中,功率控制装置100可以如图20所示那样输入“输入指令值”(扬水输入的指令值)来进行控制。该情况下的功率控制装置100中的各部的构成以及动作,只要在上述第1至第5
‑
11实施方式的说明中将“输出指令值”替换成“输入指令值”来解释即可。在该情况下,也能够得到与上述效果相同的效果。
[0269]
此外,在上述第1至第5
‑
11实施方式中,说明了对二次励磁装置的二次电流进行控制的例子,但也可以代替二次电流指令值运算部而设置二次电压指令值运算部,代替二次电流而控制二次电压。
[0270]
此外,在上述第1至第5
‑
11实施方式中,说明了在发电电动机的二次绕组侧连接有功率转换装置的例子,但本发明的功率控制装置以及功率控制方法也能够应用于在发电电动机的一次绕组侧连接有功率转换装置的情况。在发电电动机的一次侧连接有功率转换装置的情况下,如后所述,第2有效功率指令值被输入至功率转换控制指令值运算部,功率转换控制指令值运算部将功率转换控制指令值输出至功率转换装置。
[0271]
此外,在上述第1至第5
‑
11实施方式中,说明了二次励磁方式的扬水发电设备的例子,但本发明也可以应用于全转换方式的扬水发电设备。图21、图22表示在图1、图20的扬水发电设备中不在发电电动机的“二次侧”而在“一次侧”、“定子侧”或者“电枢侧”连接功率转换机构的情况下的构成的变形例(全转换方式的扬水发电设备的例子)。
[0272]
在图21、图22的变形例中,也可以代替连接在发电电动机3的一次侧的二次励磁装置8,而设置与发电电动机3的一次侧、定子侧或者电枢侧连接的功率转换装置108。此外,代替励磁用变压器6以及励磁用断路器7而设置断路器105。进而,代替角度检测器ka而设置转速检测器ra。另一方面,在功率控制装置100中,代替转速运算部57而在有效功率控制部20设置转速输入部157,该转速输入部157输入从转速检测器ra输出的转速信号并向有效功率指令值运算部21x供给。此外,代替二次电流指令值运算部31而设置功率转换控制指令值运算部131。该功率转换控制指令值运算部131使用从有效功率指令值运算部21x供给的第2有效功率指令值,对向功率转换装置108提供的功率转换控制指令值进行运算并输出。
[0273]
此外,在上述第1至第5
‑
11实施方式以及上述图21、图22的变形例中,例示了在利用水力的设备中应用发明的情况,但也能够应用于能够进行利用水以外的物质的能量的变速运转的设备。在该情况下,调速器10控制的机构不是导流叶片,而是对工作流体、燃料、混合气体、与燃料混合的物质等的物质的量进行调整的阀、喷嘴等。即,代替对水的流量进行调整的流量调整机构,应用对物质的量进行调整的物质量调整机构。此外,原动机不是水泵水轮机、水轮机,而成为其他原动机(蒸汽轮机、燃气轮机、发动机等)。工作流体不是水,而成为水蒸汽、二氧化碳、氨等。燃料是天然气、汽油、柴油、重油、煤等。与燃料混合的物质是空气、水、油等。
[0274]
如以上详述的那样,根据各实施方式,能够进行与充放电指令值相应的运转,并且能够降低流量调整机构或者整流机构或者物质量调整机构的无用动作,降低流体所流动的流路的压力变动,实现流量调整机构或者整流机构或者物质量调整机构的长寿命化。
[0275]
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并不意图对发明的范围进行限定。这些新的实施方式能够以其他各种方式加以实施,在不脱离发明的主旨的范围内能够进行各种省略、置换、变更。本实施方式及其变形包含于发明的范围及主旨中,并且包含于专利请求范围所记载的发明和与其等同的范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。