技术特征:
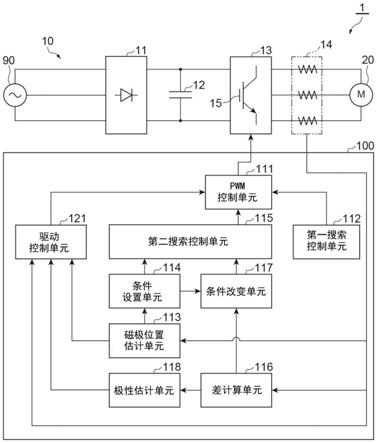
1.一种功率转换装置,包括:第一搜索控制单元,被配置为生成第一命令以向电动机提供第一电输出;磁极位置估计单元,被配置为接收对所述第一电输出的第一电响应,并基于所述第一电响应来估计所述电动机的磁极的位置;条件设置单元,被配置为根据所述磁极的估计位置来设置脉冲提供条件;第二搜索控制单元,被配置为根据所述脉冲提供条件生成第二命令以向所述电动机提供正电脉冲输出和负电脉冲输出;差计算单元,被配置为接收对所述正电脉冲输出的正电响应和对所述负电脉冲输出的负电响应,并计算所述正电响应与所述负电响应之间的大小差;条件改变单元,被配置为当所述大小差小于预定差水平时改变所述脉冲提供条件以生成修改后的第二命令;以及极性估计单元,被配置为当所述大小差大于所述预定差水平时,基于与所述修改后的第二命令相对应的大小差来估计所述磁极的极性。2.根据权利要求1所述的功率转换装置,其中,所述条件设置单元还被配置为:设置所述脉冲提供条件,使得响应于所述第二命令而产生的磁通矢量穿过所述磁极。3.根据权利要求2所述的功率转换装置,其中,所述条件改变单元还被配置为:改变所述脉冲提供条件,以改变响应于所述第二命令而产生的所述磁通矢量的方向。4.根据权利要求3所述的功率转换装置,其中,所述电动机包括多个线圈,所述多个线圈沿所述磁极的旋转方向以预定的角度间距布置;以及所述条件改变单元还被配置为:基于所述角度间距来确定所述磁通矢量的方向的调整角度,并且根据所述调整角度改变所述脉冲提供条件以改变所述磁通矢量的方向。5.根据权利要求4所述的功率转换装置,其中,所述条件改变单元还被配置为:改变所述脉冲提供条件,以使所述磁通矢量的方向基本上改变所述角度间距的一半的奇数倍。6.根据权利要求3所述的功率转换装置,其中,所述电动机包括第一磁极和第二磁极,所述第一磁极是所述磁极,所述第二磁极形成在与所述磁极不同的位置,其中,所述磁极位置估计单元还被配置为:基于所述第一电响应来估计所述第二磁极的位置,其中,所述条件设置单元还被配置为:设置所述脉冲提供条件,使得响应于所述第二命令而产生的所述磁通矢量穿过所述第一磁极,以及其中,所述条件改变单元还被配置为:改变所述脉冲提供条件,使得响应于所述修改后的第二命令而产生的所述磁通矢量穿过所述第二磁极。7.根据权利要求1至5中任一项所述的功率转换装置,还包括驱动控制单元,该驱动控制单元被配置为基于所述磁极的估计位置和所述磁极的估计极性来产生驱动命令以向所述电动机提供电功率。8.根据权利要求7所述的功率转换装置,其中,所述电动机包括作为所述磁极的第一磁极和具有与所述第一磁极的极性相反的极性的第二磁极,以及其中,所述驱动控制单元还被配置为:当所述第一磁极的估计极性与预定参考极性一致时,将正方向磁极的位置识别为所述第一磁极的估计位置;
当所述第一磁极的估计极性与所述参考极性相反时,将所述正方向磁极的位置识别为所述第二磁极的估计位置;以及产生驱动命令,以基于所述正方向磁极的位置向所述电动机提供电功率。9.根据权利要求2至4中任一项所述的功率转换装置,其中,所述条件改变单元还被配置为:改变所述脉冲提供条件,以改变所述正电脉冲输出和所述负电脉冲输出的大小。10.根据权利要求2至5中任一项所述的功率转换装置,其中,所述条件改变单元还被配置为:改变所述脉冲提供条件,以改变所述正电脉冲输出和所述负电脉冲输出的宽度。11.根据权利要求1至6中任一项所述的功率转换装置,其中,所述电动机包括传感器,以及其中,所述功率转换装置还包括:磁极位置更新单元,被配置为基于由所述传感器检测到的所述磁极的时变角度移位来更新所述磁极的估计位置;驱动控制单元,被配置为基于所述磁极的更新位置和所述磁极的估计极性来产生驱动命令以向所述电动机提供电功率;以及错误检测单元,被配置为基于由所述传感器检测到的所述磁极的移动方向来检测所述磁极的极性的估计错误。12.根据权利要求11所述的功率转换装置,其中,所述极性估计单元还被配置为:响应于所述错误检测单元检测到所述估计错误而使所述磁极的极性反转。13.根据权利要求12所述的功率转换装置,其中,所述驱动控制单元还被配置为:基于所述磁极的估计极性来识别具有预定参考极性的正方向磁极的位置,并基于所述正方向磁极的位置生成驱动命令以向所述电动机提供电功率;其中,所述极性估计单元被配置为响应于所述错误检测单元检测到所述估计错误,将所述正方向磁极的位置在电角度上移位180
°
;以及其中,所述驱动控制单元被配置为基于所述正方向磁极的经移位位置来生成所述驱动命令。14.一种方法,包括:生成第一命令以向电动机提供第一电输出;接收对所述第一电输出的第一电响应;基于所述第一电响应来估计所述电动机的磁极的位置;根据所述磁极的估计位置来设置脉冲提供条件;根据所述脉冲提供条件来生成第二命令以向所述电动机提供正电脉冲输出和负电脉冲输出;接收对所述正电脉冲输出的正电响应和对所述负电脉冲输出的负电响应;计算所述正电响应与所述负电响应之间的大小差;当所述大小差小于预定差水平时,改变所述脉冲提供条件以生成修改后的第二命令;以及当所述大小差大于所述预定差水平时,基于与修改后的第二命令相对应的大小差来估计所述磁极的极性。15.根据权利要求14所述的方法,其中,设置所述脉冲提供条件包括:设置所述脉冲提
供条件,使得响应于所述第二命令而产生的磁通矢量穿过所述磁极。16.根据权利要求14所述的方法,其中,改变所述脉冲提供条件包括:改变所述脉冲提供条件,以改变响应于所述第二命令而产生的磁通矢量的方向。17.根据权利要求16所述的方法,其中,所述电动机包括第一磁极和第二磁极,所述第一磁极是所述磁极,所述第二磁极形成在与所述磁极不同的位置,其中,所述方法还包括:基于第一电响应来估计所述第二磁极的位置,其中,设置所述脉冲提供条件包括:设置所述脉冲提供条件,使得响应于所述第二命令而产生的所述磁通矢量穿过所述第一磁极,以及其中,改变所述脉冲提供条件包括:改变所述脉冲提供条件,使得响应于修改后的第二命令而产生的所述磁通矢量穿过所述第二磁极。18.一种非暂态存储设备,在其上存储有指令,所述指令响应于由处理设备执行而使所述处理设备执行包括以下的操作:生成第一命令以向包括传感器的电动机提供第一电输出;接收对所述第一电输出的第一电响应;基于所述第一电响应来估计所述电动机的磁极的位置;根据所述磁极的估计位置来设置脉冲提供条件;根据所述脉冲提供条件来生成第二命令以提供正电脉冲输出和负电脉冲输出;接收对所述正电脉冲输出的正电响应和对所述负电脉冲输出的负电响应;计算所述正电响应与所述负电响应之间的大小差;基于所述大小差来估计所述磁极的极性;基于所述磁极的估计位置和所述磁极的估计极性来生成驱动命令以向所述电动机提供电功率;接收所述传感器响应于所述驱动命令而产生的传感器反馈;基于所述传感器反馈来确定所述磁极的时变角度移位和所述磁极的移动方向;基于所述时变角度移位和所述移动方向来更新所述磁极的估计位置;以及基于所述移动方向来检测所述磁极的极性的估计错误。19.根据权利要求18所述的非暂态存储设备,其中,所述操作还包括:响应于检测到所述估计错误而反转所述磁极的估计极性。20.根据权利要求19所述的非暂态存储设备,其中,所述操作还包括:基于所述磁极的估计极性来识别具有预定参考极性的正方向磁极的位置,其中,生成所述驱动命令包括:基于所述正方向磁极的位置来生成所述驱动命令,以及其中,反转所述估计极性包括:响应于检测到所述估计错误,将所述正方向磁极的位置在电角度上移位180
°
;以及基于所述正方向磁极的经移位位置来生成所述驱动命令。
技术总结
本公开提供功率转换装置、方法和非暂态存储设备。功率转换装置包括:第一搜索控制单元,生成第一命令以向电动机提供第一电输出;磁极位置估计单元,接收第一电输出的第一电响应并基于第一电响应估计电动机的磁极的位置;条件设置单元,根据磁极估计位置设置脉冲提供条件;第二搜索控制单元,根据脉冲提供条件生成第二命令以向电动机提供正电脉冲输出和负电脉冲输出;差计算单元,接收正电脉冲输出的正电响应和负电脉冲输出的负电响应并计算正电响应与负电响应之间的大小差;条件改变单元,当大小差小于预定差水平时改变脉冲提供条件以生成修改后的第二命令;极性估计单元,当大小差大于预定差水平时基于与第二命令对应的大小差估计磁极的极性。大小差估计磁极的极性。大小差估计磁极的极性。
技术研发人员:佐藤贞之 井浦英昭 古贺光浩
受保护的技术使用者:株式会社安川电机
技术研发日:2021.05.19
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。