1.本实用新型涉及智能扫地机器人领域,具体是一种便于清洁墙角的智能扫地机器人。
背景技术:
2.随着科技技术的进步,人们生活水平的提升,人们日常居家生活中对地面的清洁工作由智能扫地机器人代替,目前,现有技术中智能扫地机器人的清扫结构无法伸展,扩张清扫范围,清理屋内地面时,对墙角的深处进行清洁的能力一般,清洁效果差,因此本实用新型提出一种便于清洁墙角的智能扫地机器人。
技术实现要素:
3.本实用新型的目的在于提供一种便于清洁墙角的智能扫地机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种便于清洁墙角的智能扫地机器人,包括扫地机器人本体,所述扫地机器人本体的外侧壁螺栓连接有两个安装板,两个所述安装板的水平端均固定套接有转筒,两个所述转筒相靠近一端的外侧壁上均转动连接有一号转板,两个所述一号转板远离扫地机器人本体的一端均活动铰接有二号转板,两个所述二号转板之间转动连接有传动机构,两个所述二号转板之间设置有清洁机构,所述传动机构与清洁机构固定连接,所述二号转板的一侧转动连接有限位机构,所述二号转板与限位机构之间活动铰接有电动伸缩杆。
6.作为本实用新型再进一步的方案:所述传动机构包括一号转杆、二号转杆、一号传动带、二号传动带和电机,所述电机固定连接在安装板的水平端上,所述一号转杆的两端均转动连接在转筒的内侧壁上,所述电机的输出端与一号转杆固定连接,所述二号转杆设置有两个,所述一号转杆位于两个二号转杆的一侧,所述一号转杆与二号转杆之间设置有一号转轮,所述一号转轮设置有四个,位于靠近所述一号转杆的二号转杆外侧壁与两个一号转轮的内侧壁固定连接,所述一号转杆的外侧壁与两个一号转轮的内侧壁固定连接,一号传动带设置有两个,所述一号转轮两两分布在一号传动带的内部,两个所述一号传动带均与一号转轮传动连接,两个所述二号转杆均转动连接在两个二号转板之间,两个所述二号转杆的外侧壁上均固定套接有两个二号转轮,所述二号传动带设置有两个,四个所述二号转轮两两分布在二号传动带的内部,两个所述二号传动带均与二号转轮传动连接。
7.作为本实用新型再进一步的方案:所述一号转杆与二号转杆之间共同转动连接有隔离箱,所述隔离箱分别套设在两个一号传动带的外部。
8.作为本实用新型再进一步的方案:所述清洁机构包括固定套板、安装套板、内螺纹固定筒和刷毛,所述固定套板固定套接在两个二号传动带的外侧壁上,所述安装套板套设在固定套板的外侧壁上,所述内螺纹固定筒设置有多个,多个所述内螺纹固定筒的一端均固定贯穿连接在固定套板的侧壁上,所述安装套板的侧壁上螺纹连接有与多个固定套板相
适配的连接螺栓,多个所述连接螺栓均螺纹连接在内螺纹固定筒的内侧壁上。
9.作为本实用新型再进一步的方案:多个所述连接螺栓位于同一垂直面上,所述内螺纹固定筒的两侧均设置有限位块,多个所述限位块均固定连接在安装套板的内侧壁上,所述固定套板的侧壁上开设有与多个限位块相适配的限位槽,多个所述限位块均卡接在限位槽的内部。
10.作为本实用新型再进一步的方案:所述限位机构包括内杆、外筒和滑动板,所述滑动板滑动连接在外筒的内部,所述内杆的一端滑动连接在外筒的内部,所述内杆位于外筒内部的一端与滑动板固定连接,所述内杆位于外筒外部的一端与二号转板的侧壁转动连接,所述外筒的一端固定连接在安装板的底部。
11.作为本实用新型再进一步的方案:所述电动伸缩杆的底端活动铰接在外筒的外侧壁上,所述电动伸缩杆的顶端固定连接在二号转板的底部。
12.与现有技术相比,本实用新型的有益效果是:
13.本实用新型结构简单,通过设置传动机构、清洁机构、限位机构和电动伸缩杆,在智能扫地机器人本体需要对墙角深处进行清洁时,二号转板的外侧壁与内杆位于外筒外部的一端活动铰接,电动伸缩杆启动,将安装套板的一端伸展至墙角内,电机的输出端带动一号转杆转动,带动二号传动带转动,两个二号传动带共同带动固定套板传动,带动安装套板上的多个刷毛同步移动,该设计使得本实用新型能够伸展清洁机构,扩张清扫范围,并通过清洁机构中的多个刷毛对墙角深处进行反复清洁,清洁效果好。
附图说明
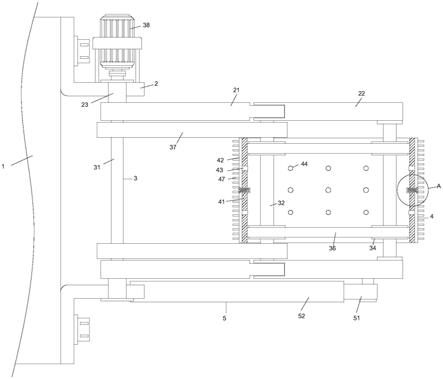
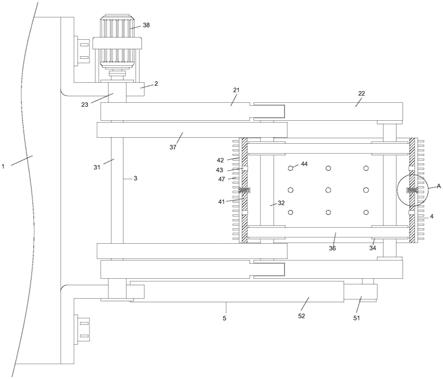
14.图1为一种便于清洁墙角的智能扫地机器人的俯视结构示意图;
15.图2为一种便于清洁墙角的智能扫地机器人的主视结构示意图;
16.图3为一种便于清洁墙角的智能扫地机器人中部分传动机构的结构示意图;
17.图4为图1中a部分的放大示意图。
18.图中:1、扫地机器人本体;2、安装板;21、一号转板;22、二号转板;23、转筒;3、传动机构;31、一号转杆;32、二号转杆;33、一号转轮;34、二号转轮;35、一号传动带;36、二号传动带;37、隔离箱;38、电机;4、清洁机构;41、固定套板;42、安装套板;43、限位块;44、限位槽;45、内螺纹固定筒;46、连接螺栓;47、刷毛;5、限位机构;51、内杆;52、外筒;53、滑动板;6、电动伸缩杆。
具体实施方式
19.请参阅图1~4,本实用新型实施例中,一种便于清洁墙角的智能扫地机器人,包括扫地机器人本体1,扫地机器人本体1的外侧壁螺栓连接有两个安装板2,两个安装板2的水平端均固定套接有转筒23,两个转筒23相靠近一端的外侧壁上均转动连接有一号转板21,两个一号转板21远离扫地机器人本体1的一端均活动铰接有二号转板22,两个二号转板22之间转动连接有传动机构3,两个二号转板22之间设置有清洁机构4,传动机构3与清洁机构4固定连接,二号转板22的一侧转动连接有限位机构5,二号转板22与限位机构5之间活动铰接有电动伸缩杆6。
20.其中,传动机构3包括一号转杆31、二号转杆32、一号传动带35、二号传动带36和电
机38,电机38固定连接在安装板2的水平端上,一号转杆31的两端均转动连接在转筒23的内侧壁上,电机38的输出端与一号转杆31固定连接,二号转杆32设置有两个,一号转杆31位于两个二号转杆32的一侧,一号转杆31与二号转杆32之间设置有一号转轮33,一号转轮33设置有四个,位于靠近一号转杆31的二号转杆32外侧壁与两个一号转轮33的内侧壁固定连接,一号转杆31的外侧壁与两个一号转轮33的内侧壁固定连接,一号传动带35设置有两个,一号转轮33两两分布在一号传动带35的内部,两个一号传动带35均与一号转轮33传动连接,两个二号转杆32均转动连接在两个二号转板22之间,两个二号转杆32的外侧壁上均固定套接有两个二号转轮34,二号传动带36设置有两个,四个二号转轮34两两分布在二号传动带36的内部,两个二号传动带36均与二号转轮34传动连接。
21.其中,一号转杆31与二号转杆32之间共同转动连接有隔离箱37,隔离箱37分别套设在两个一号传动带35的外部。
22.其中,清洁机构4包括固定套板41、安装套板42、内螺纹固定筒45和刷毛47,固定套板41固定套接在两个二号传动带36的外侧壁上,安装套板42套设在固定套板41的外侧壁上,内螺纹固定筒45设置有多个,多个内螺纹固定筒45的一端均固定贯穿连接在固定套板41的侧壁上,安装套板42的侧壁上螺纹连接有与多个固定套板41相适配的连接螺栓46,多个连接螺栓46均螺纹连接在内螺纹固定筒45的内侧壁上。
23.其中,多个连接螺栓46位于同一垂直面上,内螺纹固定筒45的两侧均设置有限位块43,多个限位块43均固定连接在安装套板42的内侧壁上,固定套板41的侧壁上开设有与多个限位块43相适配的限位槽44,多个限位块43均卡接在限位槽44的内部。
24.其中,限位机构5包括内杆51、外筒52和滑动板53,滑动板53滑动连接在外筒52的内部,内杆51的一端滑动连接在外筒52的内部,内杆51位于外筒52内部的一端与滑动板53固定连接,内杆51位于外筒52外部的一端与二号转板22的侧壁转动连接,外筒52的一端固定连接在安装板2的底部。
25.其中,电动伸缩杆6的底端活动铰接在外筒52的外侧壁上,电动伸缩杆6的顶端固定连接在二号转板22的底部。
26.本实用新型的工作原理是:本实用新型使用时连接电源,通过设置传动机构3、清洁机构4、限位机构5和电动伸缩杆6,在智能扫地机器人本体1需要对墙角深处进行清洁时,由于一号转板21和二号转板22相靠近的一端活动铰接,二号转板22的外侧壁与内杆51位于外筒52外部的一端活动铰接,电动伸缩杆6启动,其输出端推动二号转板22向远离扫地机器人本体1的方向移动,将安装套板42的一端伸展至墙角内,由于一号转杆31和二号转杆32上的一号转轮33均与一号传动带35传动连接,两个二号转杆32上的二号转轮34均与二号传动带36传动连接,电机38启动,电机38的输出端带动一号转杆31转动,带动二号传动带36转动,两个二号传动带36共同带动固定套板41传动,带动安装套板42上的多个刷毛47同步移动,该设计使得本实用新型能够伸展清洁机构4,扩张清扫范围,并通过清洁机构4中的多个刷毛47对墙角深处进行反复清洁,清洁效果好。
27.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。