1.本实用新型属于包装机械技术领域,具体涉及一种单摇臂缠绕包装机的智能配重装置及包装机。
背景技术:
2.本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
3.在缠绕包装行业,单摇臂缠绕包装机因其包装效果好,运行可靠而得到了广泛应用。单摇臂缠绕包装机摇臂为l型结构,由水平横梁和垂直立柱两部分组成;垂直立柱上安装有膜架升降机构,膜架上安装有重几十公斤的缠绕膜,水平横梁中心设置有驱动机构带动摇臂旋转,水平横梁的一端固定有配重铁块用来平衡垂直立柱的质量。现有单摇臂缠绕包装机主要存在的问题是包装速度慢,即摇臂只能在较低转速下运行;其原因主要是现有摇臂缠绕机的配重块是位置固定的,只能保证某个质量下的摇臂平衡,而由于缠绕膜的包装消耗,重量是动态减少,摇臂质量不平衡产生不平衡离心力,引起摇臂旋转中心(支撑系统)在较高转速下的振动,无法提升摇臂转速。
技术实现要素:
4.本实用新型为了解决上述问题,提出了一种单摇臂缠绕包装机的智能配重装置及包装机,本实用新型通过实时监测缠绕膜的重量,调整水平横梁一侧配重块的位置,使摇臂实现动态平衡,提高转动速度,进而提高包装效率。
5.根据一些实施例,本实用新型的第一种方案提供了一种单摇臂缠绕包装机的智能配重装置,采用如下技术方案:
6.一种单摇臂缠绕包装机的智能配重装置,包括:
7.丝杠,一端连接有伺服电机;
8.配重块,与所述丝杠转动连接;
9.底座,一侧设置有滑动轨道;所述底座一端通过第二连接块与所述电机的输出轴连接,另一端通过第一连接块与所述丝杠远离所述伺服电机的一端连接;所述配重块与所述滑动轨道之间通过滑块机构连接。
10.进一步的,所述丝杠与所述伺服电机的输出轴通过联轴器连接。
11.进一步的,所述第二连接块设置在所述伺服电机和所述联轴器之间。
12.进一步的,所述第二连接块通过第二轴承与所述电机输出轴转动连接,所述第一连接块与所述丝杠远离伺服电机的一端通过第一轴承转动连接。
13.根据一些实施例,本实用新型的第二种方案提供了一种包装机,包括:
14.第一种方案中提供的单摇臂缠绕包装机的智能配重装置。
15.摇臂,包括垂直立柱和水平横梁;所述智能配重装置固定在所述水平横梁远离所述垂直立柱的一端。
16.进一步的,所述智能配重装置通过螺栓连接固定在所述水平横梁上。
17.进一步的,所述伺服电机的输出轴轴线方向与所述水平横梁的长度方向平行。
18.进一步的,所述垂直立柱远离所述水平横梁的一端设置缠绕膜,所述缠绕膜远离所述水平横梁的一端设置托盘,所述托盘上安装称重传感器。
19.进一步的,所述称重传感器和所述伺服电机共同连接plc。
20.与现有技术相比,本实用新型的有益效果为:
21.本实用新型垂直立柱的一端固定智能配重装置,通过plc实时监测缠绕膜的重量,调整水平横梁一侧配重块的位置,使摇臂实现动态平衡,提高转动速度,进而提高包装效率。
附图说明
22.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
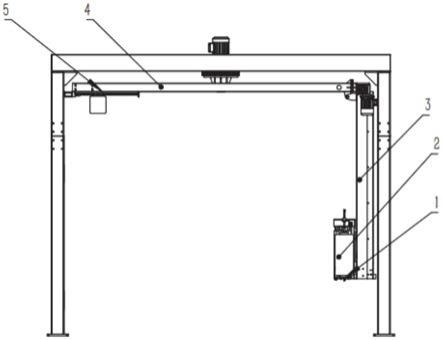
23.图1是本实用新型的实施例2的总体结构示意图;
24.图2是本实用新型的实施例1的配重装置主视图;
25.图3是本实用新型的实施例1的配重装置俯视图。
26.图中,1、托盘,2、缠绕膜,3、垂直立柱,4、水平横梁,5、配重装置,51、伺服电机,52、丝杠,53、配重块,54、滑块机构, 55、滑动导轨,56、底座,57、第一连接块,58、第二连接块。
具体实施方式:
27.下面结合附图与实施例对本实用新型作进一步说明。
28.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
29.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
30.在本实用新型中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本实用新型各部件或元件结构关系而确定的关系词,并非特指本实用新型中任一部件或元件,不能理解为对本实用新型的限制。
31.本实用新型中,术语如“固接”、“相连”、“连接”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本实用新型中的具体含义,不能理解为对本实用新型的限制。
32.实施例1:
33.如图1和图2所示,一种单摇臂缠绕包装机的智能配重装置,包括伺服电机51、丝杠
52、配重块53、滑块机构54和滑动导轨55,底座56,第一连接块57,第二连接块58。
34.所述伺服电机51的输出轴通过联轴器连接所述丝杠52的右端,所述丝杠52上转动连接所述配重块53;所述丝杠52的左右侧设置滑动导轨55,所述滑动导轨55设置在所述底座56上;所述底座56 右端通过第二连接块58与所述伺服电机51的输出轴转动连接,所述底座56的左端通过第一连接块57与所述丝杠52的左端转动连接;所述第一连接块57和所述第二连接块58与所述底座56固定连接,所述第一连接块57和所述第二连接块58分别通过第一轴承和第二轴承与所述丝杠52的左端和所述伺服电机51的输出轴转动连接;所述配重块53与所述滑动导轨55之间通过所述滑块机构54滑动连接。
35.实施例2:
36.如图1所示,一种包装机,包括托盘1、缠绕膜2、垂直立柱3、水平横梁4和智能配重装置5;所述智能配重装置5采用如实施例1 所述的单摇臂缠绕包装机的智能配重装置。
37.所述智能配重装置5通过螺栓连接固定在所述水平横梁4左端。
38.所述伺服电机51的输出轴轴线方向与所述水平横梁4的长度方向平行。
39.所述垂直立柱3下端设置缠绕膜2,所述缠绕膜2下端设置托盘 1,所述托盘1上安装称重传感器;所述称重传感器连接plc,所述伺服电机51通过电机驱动器也连接到plc上;plc接收所述称重传感器信号,驱动所述伺服电机51正\反转运转,使所述配重块53在所述丝杠52的驱动下沿所述滑动导轨55靠近或远离包装机的旋转中心,动态调节所述水平横梁4上配重距旋转中心的距离,实现包装机的动态平衡调节。
40.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
41.上述虽然结合附图对本实用新型的具体实施方式进行了描述,但并非对本实用新型保护范围的限制,所属领域技术人员应该明白,在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。