1.本实用新型涉及锥桶自动收放结构领域,尤其是涉及全自动锥桶收放的自动抓取机构。
背景技术:
2.随着我国交通系统的高速发展,国内的高速公路总长度已经成为世界第一,高速公路车流量大,车速快,维修频繁。对高速公路维修时需要使用一种交通锥桶作为警示作用,保护施工队伍的人员以及设备安全,多数施工现场的交通锥桶使用人工摆放和回收,目前新的交通锥桶标准已经开始执行,新型锥桶无论在重量还是外形上都有很大增幅,直接加大施工人员的工作量,降低了工作效率,并且在车流量高的路段施工时,开始放置和结束收取的这两段时间施工人员是暴露在危险之中。因此设计一种全自动交通锥桶收放车是迫切的有必要的。在锥桶自动收放过程中,锥桶的自动抓取是最重要的环节之一。
3.目前市场上的半自动锥桶收放车种类较多,但由于效率不高,摆放距离不稳定,而且并没有大幅度降低施工人员工作强度,因此都没有有效地占据市场,个别单位及个人依旧在大力研究交通锥桶自动收放车。
4.此外,锥桶自动收放中还存在有一大难题,就是怎样从垒砌的锥桶中自动抓取出一个锥桶,并成功的输送至另一平台;或者将地面上的锥桶自动抓取上来。
技术实现要素:
5.本实用新型针对以上问题,提出了一种结构精巧、易于操作、运行平稳、抓取效果好,并且可以在锥桶堆中抓取单个锥桶的交通锥桶抓手机构。
6.本实用新型的技术方案为:交通锥桶抓手机构包括抓手架6、作动杆、一对连接板7以及一对夹爪,所述作动杆连接在抓手架6中,并可在手动或自动控制下相对于抓手架6往复运动;
7.一对所述连接板7均与作动杆铰接,一对所述夹爪的根部均铰接在抓手架6的内壁上,且一对所述夹爪的中部分别与一对连接板7铰接。
8.所述作动杆与抓手架6滑动连接。
9.所述锥桶自动抓取机构还包括直线驱动机构,所述作动杆为直线驱动机构的输出杆。
10.所述夹爪呈弯钩状或l字形。
11.所述作动杆处于抓手架6的顶部,一对连接板7的顶端均与作动杆的底端铰接,所述夹爪的一端铰接在抓手架6的内壁上、且夹爪的中部铰接与连接板7的底端铰接。
12.一对夹爪相对设置,并且沿抓手架6的中心对称设置。
13.所述抓手架6包括固定相连的安装部以及套接部,所述作动杆以及连接板均处在安装部中,所述夹爪的根部铰接在安装部的内壁上,所述套接部的内壁与交通锥桶的顶部相适配。
14.本实用新型能够适应不同规格的锥桶,能够将不同规格的单个锥桶从垒砌的锥桶中抓取出来,运动平稳,抓取速度快,适应面广,能够满足锥桶自动收放过程中的要求。具有结构简单合理、使用方便等优点,尤其适用高速公路、市政道路等锥桶自动收放车上,解决了锥桶自动抓取的难题。
附图说明
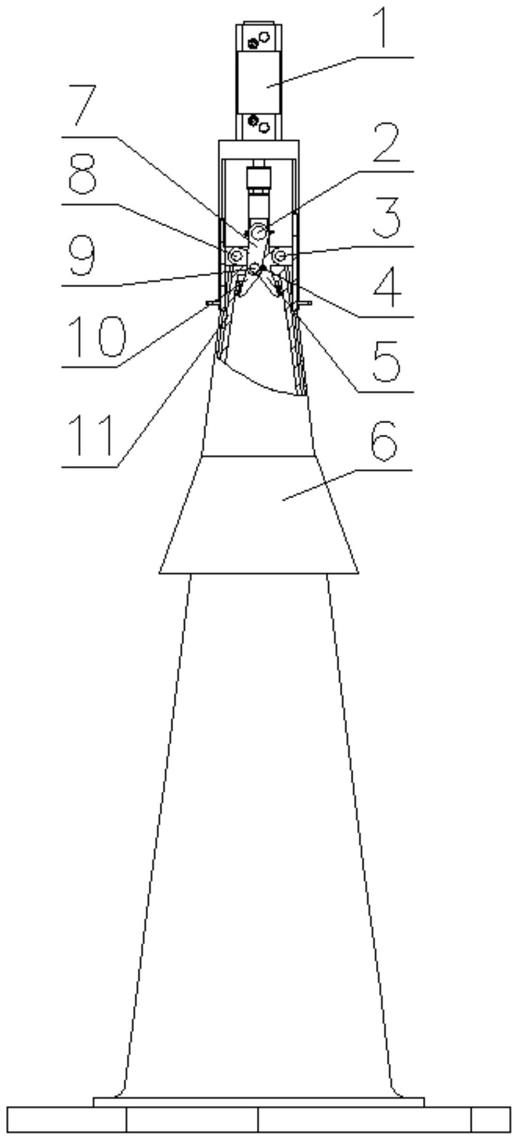
15.图1是本案在抓取时的工作状态参考图;
16.图2是本案在伸入时的工作状态参考图;
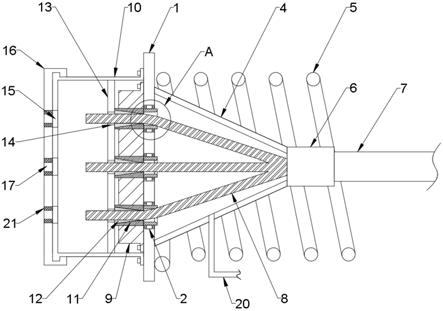
17.图3是本案的立体图;
18.图中1是气缸,2是转轴一,3是转轴二,4是转轴三,5是夹爪一,6是抓手架,7是连接板,8是转轴四,9是转轴五,10是夹爪二,11是锥桶。
具体实施方式
19.为能清楚说明本专利的技术特点,下面通过具体实施方式,并结合其附图,对本专利进行详细阐述。
20.交通锥桶抓手机构包括抓手架6、作动杆、一对连接板7以及一对夹爪,所述作动杆连接在抓手架6中,并可在手动或自动控制下相对于抓手架6往复运动;
21.一对所述连接板7均与作动杆铰接,一对所述夹爪的根部均铰接在抓手架6的内壁上,且一对所述夹爪的中部分别与一对连接板7铰接。这样,控制作动杆相对于抓手架6上下运动时,即可通过一对连接板7同时拉拽一对夹爪,使得一对夹爪以根部为轴心转动,从而使得一对夹爪自锥桶顶部的通孔伸入或退出锥桶。
22.在此情况下,由于交通锥桶相互堆叠摆放时,相邻锥桶的顶部并不会保持贴合,而是会留有一定的间隙,因此,作动杆相对于抓手架6向下运动,夹爪锥桶顶部的通孔伸入锥桶之后,将伸入至上述的间隙中,从而仅完成对单个锥桶的夹取,最终,即可实现从垒砌的锥桶中抓取出一个锥桶的目的。
23.在单个锥桶被夹取之后,使得作动杆和抓手架保持相对静止,即可保持对该锥桶的夹持,以便于将其输送至另一目标位置上,比如平台。待单个锥桶输送到位之后,可控制作动杆相对于抓手架6向上运动,使得一对夹爪反向转动,松开对该锥桶的夹持,并在抓手架相对与锥桶整体上移的过程中,随抓手架的运动自锥桶顶部的通孔退出锥桶。
24.当采用手动的方式控制所述作动杆升降时,所述作动杆与抓手架6滑动连接。此时,往复拉拽作动杆即可控制其相对于抓手架6做直线往复运动。
25.当采用自动的方式控制所述作动杆升降时,所述锥桶自动抓取机构还包括直线驱动机构,所述作动杆为直线驱动机构的输出杆。直线驱动机构可以是电动推杆、气缸、液压缸等,以气缸为例,气缸1固定连接在抓手架6上,所述作动杆为气缸1的输出杆,也可称为活塞杆;气缸1开启后即可驱使作动杆相对于抓手架6做直线往复运动。
26.作为优选,所述夹爪呈弯钩状或l字形。以便于夹爪远离抓手架内壁的一端自锥桶顶部的通孔伸入或退出锥桶。
27.进一步的,所述作动杆处于抓手架6的顶部,一对连接板7的顶端均通过转轴一2与作动杆的底端铰接,所述夹爪的一端铰接在抓手架6的内壁上、且夹爪的中部铰接与连接板
7的底端铰接,所述夹爪的另一端可自锥桶顶部的通孔伸入或退出锥桶。
28.具体来说:一对夹爪分别为夹爪一5和夹爪二10;
29.夹爪一5的根部通过转轴二3铰接在抓手架6的内壁上,夹爪一5的中部通过转轴三4与一个连接板7的底端铰接;
30.夹爪二10的根部通过转轴四8铰接在抓手架6的内壁上,夹爪二10的中部通过转轴五9与另外一个连接板7的底端铰接。
31.一对夹爪相对设置,并且沿抓手架6的中心对称设置。从而便于各个零件的设计与加工,并可使得结构更为精巧、合理。
32.所述抓手架6包括固定相连的安装部以及套接部,所述作动杆以及连接板均处在安装部中,所述夹爪的根部铰接在安装部的内壁上,所述套接部的内壁与交通锥桶的顶部相适配。从而在使用时,可借助与交通锥桶顶部适配的套接部,对抓手架的位置进行快速定位,以显著提高抓取时的工作效率。
33.如图1
‑
3所示,气缸1安装在抓手架6上,连接板7通过转轴一2与气缸1相连,夹爪一5通过转轴二3、转轴三4分别与抓手架6、连接板7相连,夹爪二10通过转轴四8、转轴五9分别与抓手架6、连接板7相连。
34.如图1
‑
3所示,气缸1缩到最短时,夹爪一5和夹爪二10合拢,如图2所示,此时将抓手架6向下移动,夹爪一5和夹爪二10伸入锥桶11中,气缸1伸长,夹爪一5和夹爪二10张开,如图1所示,抓手架6向上移动,完成剥离、抓取锥桶。锥桶的抓取过程,迅速、准确。
35.所述的一种锥桶自动抓取机构,无污染,满足环保要求。
36.本实用新型具体实施途径很多,以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进,这些改进也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。