1.本技术涉及汽车清洗设备技术领域,特别涉及为一种洗车机及洗车机刷具控制方法。
背景技术:
2.随着人们生活的不断提高,汽车保有量越来越多,对洗车需求也越来越多,然而洗车价格、人力成本却不断的上涨,洗车难、洗车贵、洗车时间长以经成为大部分人的痛点,因此自动洗车机洗车越来越受到欢迎。然而,在自动洗车机洗车的过程中,用于洗车的洗车刷需要清洗车辆全身,然而由于车身具有各部件,如车牌,使得洗车刷在清洗工作中,容易将车牌损坏。
技术实现要素:
3.本发明的目的在于提供一种洗车机及洗车机刷具控制方法,能够在洗车过程中减少刷具对车牌的损坏。
4.为了实现上述发明目的,本发明提供如下技术方案:
5.第一方面,提供一种洗车机,所述洗车机包括:控制器、传送装置、支架、刷具,所述传送装置用于传送待洗车辆,所述刷具滑动连接于所述支架上,所述支架延伸的方向与所述待洗车辆传送的方向形成的夹角α范围为:0
°
<α<90
°
;
6.所述刷具的清洗轨迹依次包括第一段清洗轨迹和第二段清洗轨迹,所述第一段清洗轨迹为所述刷具接触车牌时的清洗轨迹,所述第二段清洗轨迹为所述刷具离开车牌后沿着车身移动且未到达后视镜时的轨迹;
7.所述控制器用于:
8.在所述刷具位于所述第一段清洗轨迹时,控制所述刷具顺向转动;
9.在所述刷具位于所述第二段清洗轨迹时,控制所述刷具逆向转动;
10.当所述刷具的清洗轨迹位于所述待洗车辆传送的方向左侧时,所述顺向为俯视视角的顺时针方向,所述逆向为俯视视角的逆时针方向;当所述刷具的清洗轨迹位于所述待洗车辆传送的方向右侧时,所述顺向为俯视视角的逆时针方向,所述逆向为俯视视角的顺时针方向。
11.与现有技术相比,本技术具有以下有益效果:
12.(1)在刷具位于第一段清洗轨迹时,控制刷具顺向转动,即在刷具接触车牌时,刷具顺向转动避免刷毛快速转动时缠绕车牌或打翻车牌。
13.(2)刷具滑动连接于所述支架上,支架延伸的方向与待洗车辆传送的方向形成的夹角α范围为:0<α<90,使得刷具能够被向前传送的待洗车辆推动沿着支架延伸的方向移动,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。
14.(3)在刷具位于第二段清洗轨迹时,控制刷具逆向转动,逆向转动的刷毛在与车身接触时具有相同的运动方向,减少刷具对车身运动的阻碍。
15.(4)刷具滑动连接于支架上,支架延伸的方向与待洗车辆传送的方向形成的夹角α范围为:0<α<90,并且在刷具位于第二段清洗轨迹时,控制刷具逆向转动。由于轨道相较于车辆传送的方向是倾斜的,并且刷具在贴合车身逆向转动时能够受到车身提供的反作用力,在无需主动驱动刷具动作的结构的情况下,合理设置轨道与车辆传送的方向倾斜的角度并根据该反作用力能够方便的调节刷具与车身贴合的程度,以适应不同车辆的清洗要求。
16.进一步的,所述洗车机还包括:编码器,所述编码器与用于驱动所述传送装置的电机耦合,所述编码器用于向所述控制器输出编码值,所述编码值用于指示所述待洗车辆车头的坐标;所述刷具的初始位置位于所述第一段轨迹的起点,所述第一段轨迹的起点对应于第一坐标;
17.所述在刷具位于第一段清洗轨迹时,控制刷具顺向转动,具体包括:
18.接收到的编码值等于第一预设编码值时,判定所述刷具位于第一段清洗轨迹内并控制所述刷具顺向转动;其中,所述第一预设编码值用于指示所述待洗车辆车头到达所述第一坐标。
19.当刷具顺向转动,能避免刷毛快速转动时缠绕前车牌或打翻前车牌。
20.进一步的,所述洗车机还包括:第一位置传感器,所述第一位置传感器用于检测所述刷具达到第二段清洗轨迹的起点;所述第二段轨迹的起点对应于第二坐标;
21.所述在所述刷具位于第二段清洗轨迹时,控制所述刷具逆向转动,具体包括:
22.所述控制器接收到的编码值等于第二预设编码值时,则判定所述刷具位于第二段清洗轨迹内并控制所述刷具逆向转动;其中,所述第二预设编码值用于指示所述待洗车辆车头到达所述第二坐标。
23.刷具变为逆向转动后,借助逆向转动与车身的反向摩擦力使刷具沿着第二段清洗轨迹清洗车身,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。同时,由于逆向转动的刷毛在与车身接触时具有相同的运动方向,减少了刷具对车身运动的阻碍。
24.进一步的,在第二段清洗轨迹之后,所述刷具的清洗轨迹还包括第三段清洗轨迹,所述第三段轨迹为所述刷具接触后视镜时的清洗轨迹;所述第三段轨迹的起点对应于第三坐标;
25.所述控制器接收到的编码值等于第三预设编码值时,判定所述刷具位于第三段清洗轨迹内并控制所述刷具顺向转动;其中,所述第三预设编码值用于指示所述待洗车辆车头到达所述第三坐标。
26.刷具变为顺向转动后,与后视镜的延伸方向一致,所以不会缠绕后视镜或打翻后视镜。
27.进一步的,在第三段清洗轨迹之后,所述刷具的清洗轨迹还包括第四段清洗轨迹,所述第四段轨迹为所述刷具离开所述后视镜后沿着车身的清洗轨迹;所述第四段轨迹的起点对应于第四坐标;
28.所述控制器接收到的编码值等于第四预设编码值时,判定所述刷具位于第四段清洗轨迹内并控制所述刷具逆向转动;其中,所述第四预设编码值用于指示所述待洗车辆车头到达所述第四坐标。
29.刷具变为逆向转动后,借助逆向转动与车身的反向摩擦力使刷具沿着第四段清洗轨迹清洗侧面车身和车尾,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。同时,由于逆向转动的刷毛在与车身接触时具有相同的运动方向,减少了刷具对车身运动的阻碍。
30.进一步的,所述洗车机还包括横梁和气缸,所述支架转动连接于所述横梁上,所述气缸一端连接所述横梁,另一端连接所述支架;
31.所述控制器接收到的编码值等于第三预设编码值时,还控制所述气缸动作,所述气缸动作时驱动支架转动,以带动所述刷具朝接近车身的方向移动。
32.根据需要控制器启动气缸控制支架改变方向,以带动所述刷具朝接近车身的方向移动。使得刷具与待洗车辆车身贴合程度高,清洗效果好。
33.进一步的,所述第四段轨迹具体包括:
34.所述刷具离开所述后视镜后沿着车身清洗到车尾、再沿车尾清洗到后车牌;
35.当所述刷具位于第四段清洗轨迹内时,包括所述刷具清洗所述后车牌时,所述刷具逆向转动。
36.刷具逆向清洗后车牌时,刷具转动方向与后车牌的延伸方向相同,能避免刷毛快速转动时缠绕后车牌或打翻后车牌。
37.第二方面,提供一种洗车机刷具控制方法,应用于洗车机,所述洗车机包括:控制器、传送装置、支架、刷具,所述传送装置用于传送待洗车辆,所述刷具滑动连接于所述支架上,所述支架延伸的方向与所述待洗车辆传送的方向形成的夹角α范围为:0
°
<α<90
°
;
38.所述刷具的清洗轨迹依次包括第一段清洗轨迹和第二段清洗轨迹,所述第一段清洗轨迹为所述刷具接触车牌时的清洗轨迹,所述第二段清洗轨迹为所述刷具离开车牌后沿着车身移动且未到达后视镜时的轨迹;
39.所述方法包括:
40.在所述刷具位于所述第一段清洗轨迹时,控制器控制所述刷具顺向转动;
41.在所述刷具位于所述第二段清洗轨迹时,控制器控制所述刷具逆向转动;
42.当所述刷具的清洗轨迹位于所述待洗车辆传送的方向左侧时,所述顺向为俯视视角的顺时针方向,所述逆向为俯视视角的逆时针方向;当所述刷具的清洗轨迹位于所述待洗车辆传送的方向右侧时,所述顺向为俯视视角的逆时针方向,所述逆向为俯视视角的顺时针方向。
43.与现有技术相比,本技术具有以下有益效果:
44.(1)在刷具位于第一段清洗轨迹时,控制刷具顺向转动,即在刷具接触车牌时,刷具顺向转动避免刷毛快速转动时缠绕车牌或打翻车牌。
45.(2)刷具滑动连接于所述支架上,支架延伸的方向与待洗车辆传送的方向形成的夹角α范围为:0<α<90,使得刷具能够被向前传送的待洗车辆推动沿着支架延伸的方向移动,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。
46.(3)在刷具位于第二段清洗轨迹时,控制刷具逆向转动,逆向转动的刷毛在与车身接触时具有相同的运动方向,减少刷具对车身运动的阻碍。
47.(4)刷具滑动连接于支架上,支架延伸的方向与待洗车辆传送的方向形成的夹角α范围为:0<α<90,并且在刷具位于第二段清洗轨迹时,控制刷具逆向转动。由于轨道相较于
车辆传送的方向是倾斜的,并且刷具在贴合车身逆向转动时能够受到车身提供的反作用力,在无需主动驱动刷具动作的结构的情况下,合理设置轨道与车辆传送的方向倾斜的角度并根据该反作用力能够方便的调节刷具与车身贴合的程度,以适应不同车辆的清洗要求。
48.进一步的,在第二段清洗轨迹之后,所述刷具的清洗轨迹还包括第三段清洗轨迹,所述第三段轨迹为所述刷具接触后视镜时的清洗轨迹;所述第三段轨迹的起点对应于第三坐标;
49.所述方法还包括:
50.当接收到的编码值等于第三预设编码值时,控制器判定所述刷具位于第三段清洗轨迹内并控制所述刷具顺向转动;其中,所述第三预设编码值用于指示所述待洗车辆车头到达所述第三坐标。
51.刷具变为顺向转动后,与后视镜的延伸方向一致,所以不会缠绕后视镜或打翻后视镜。
52.进一步的,在第三段清洗轨迹之后,所述刷具的清洗轨迹还包括第四段清洗轨迹,所述第四段轨迹为所述刷具离开所述后视镜后沿着车身的清洗轨迹;所述第四段轨迹的起点对应于第四坐标;
53.所述方法还包括:
54.当接收到的编码值等于第四预设编码值时,控制器判定所述刷具位于第四段清洗轨迹内并控制所述刷具逆向转动;其中,所述第四预设编码值用于指示所述待洗车辆车头到达所述第四坐标。
55.刷具变为逆向转动后,借助逆向转动与车身的反向摩擦力使刷具沿着第四段清洗轨迹清洗侧面车身和车尾,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。同时,由于逆向转动的刷毛在与车身接触时具有相同的运动方向,减少了刷具对车身运动的阻碍。
附图说明
56.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
57.其中:
58.图1为本发明实施例中一种洗车机刷具控制方法在俯视视角时的原理示意图;
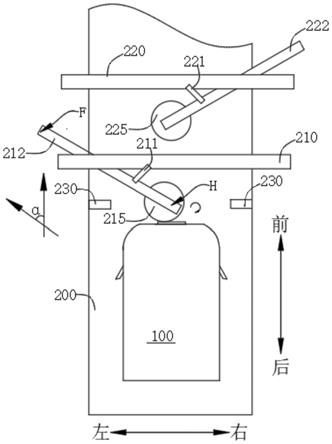
59.图2为本发明实施例中刷具位于所述第一段清洗轨迹时的结构示意图;
60.图3为本发明实施例中刷具位于所述第二段清洗轨迹时的结构示意图;
61.图4为本发明实施例中刷具位于所述第三段清洗轨迹时的结构示意图;
62.图5为本发明实施例中洗车机局部结构示意图;
63.图6为本发明实施例中一种洗车机刷具控制方法的流程示意图。
64.附图标记:
65.100、待洗车辆;110、前车牌;120、后视镜;130、后车牌;200、链板;201、龙门架;
210、第一横梁;211、第一气缸;212、第一支架;213、第一滑轨;214、第一滑块;215、第一刷具;220、第二横梁;221、第二气缸;222、第二支架;223、第二滑轨;224、第二滑块;225、第二刷具;230、第一位置传感器。
具体实施方式
66.应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
67.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
68.在一个实施例中,提供了一种洗车机刷具控制方法,应用于洗车机,所述洗车机包括:控制器、传送装置、支架、刷具,所述传送装置用于传送待洗车辆100,所述刷具滑动连接于所述支架上,所述支架延伸的方向与所述待洗车辆100传送的方向形成的夹角α范围为:0
°
<α<90
°
;所述刷具的清洗轨迹依次包括第一段清洗轨迹和第二段清洗轨迹,所述第一段清洗轨迹为所述刷具接触车牌时的清洗轨迹,所述第二段清洗轨迹为所述刷具离开车牌后沿着车身移动且未到达后视镜120时的轨迹。如图1所示,ab段为第一段清洗轨迹,其中a为第一段清洗轨迹起点,b为第一段清洗轨迹终点也是第二段清洗轨迹起点,bc段为第二段清洗轨迹,其中b为第二段清洗轨迹起点,c为第二段清洗轨迹终点。如图5所示,滑轨固定在支架上,刷具通过滑块滑动连接在滑轨上。
69.如图6所示,所述方法包括:
70.步骤s102:在刷具位于所述第一段清洗轨迹时,控制器控制刷具顺向转动。
71.在一个实施例中,所述洗车机还包括:编码器,所述编码器与用于驱动所述传送装置的电机耦合,所述编码器用于向所述控制器输出编码值,所述编码值用于指示所述待洗车辆100车头的坐标;所述刷具的初始位置位于所述第一段轨迹的起点,所述第一段轨迹的起点对应于第一坐标;
72.所述在刷具位于第一段清洗轨迹时,控制刷具顺向转动,具体包括:
73.接收到的编码值等于第一预设编码值时,判定所述刷具位于第一段清洗轨迹内并控制所述刷具顺向转动;其中,所述第一预设编码值用于指示所述待洗车辆100车头到达所述第一坐标。
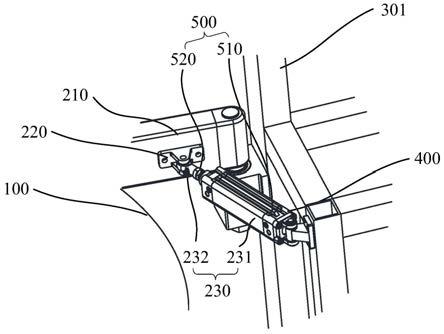
74.其中,待洗车辆100停放在链板200上,由电机带动链板200,链板200带动待洗车辆100前进。以洗车平台为坐标轴,分成若干个坐标,对应不同的编码值,控制器可以根据接收到的编码信号,判定编码盘转动的角度,从而得到链板200运转的长度,进而判定车辆的坐标。第一坐标为待洗车辆100与刷具接触时待洗车辆100的坐标,第一坐标对应第一段清洗轨迹的起点,即a点。当控制器接收到的编码值等于第一预设编码值时,判定刷具位于第一段清洗轨迹内并控制刷具顺向转动。刷具顺向转动,能避免刷毛快速转动时缠绕车牌或打翻车牌。
75.步骤s104:在刷具位于第二段清洗轨迹时,控制器控制刷具逆向转动。
76.在一个实施例中,洗车机还包括:第一位置传感器230,第一位置传感器230用于检测刷具达到第二段清洗轨迹的起点;第二段轨迹的起点对应于第二坐标;
77.在刷具位于第二段清洗轨迹时,控制刷具逆向转动,具体包括:
78.控制器接收到的编码值等于第二预设编码值时,则判定刷具位于第二段清洗轨迹内并控制刷具逆向转动。其中,所述第二预设编码值用于指示所述待洗车辆100车头到达所述第二坐标。
79.其中,当刷具随着待洗车辆100的撞击移动到第二段清洗轨迹的起点,即b点时,即刷具清洗完车牌后,第一位置传感器230检测到刷具到达,控制器接收到的编码值等于第二预设编码值,控制刷具由顺向转动改为逆向转动。刷具变为逆向转动后,借助逆向转动与车身的反向摩擦力使刷具沿着第二段清洗轨迹清洗车身,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。同时,由于逆向转动的刷毛在与车身接触时具有相同的运动方向,减少了刷具对车身运动的阻碍。
80.其中,预设编码值的设计原理在于:以洗车机长度为x轴,记录车到第二段清洗轨迹起点时的坐标(x1,0);随着待洗车辆100的前进,由于车刷一直贴合车身,车前进,车刷也就在车身上移动,当车刷移动到第二段清洗轨迹终点时,记录此刻车辆的坐标(x2,0),则第二段移动轨迹的距离为x2
‑
x1;根据x2
‑
x1推出电机转动的角度,从而得知编码盘转动的角度,进而计算出相应的编码值;当控制器接收到的编码值等于第二预设编码值时,控制刷具逆向转动。其他预设编码值设计原理同上。
81.如图2
‑
4所示,在一个实施例中,当所述刷具的清洗轨迹位于所述待洗车辆100传送的方向左侧时,所述顺向为俯视视角的顺时针方向,所述逆向为俯视视角的逆时针方向;当所述刷具的清洗轨迹位于所述待洗车辆100传送的方向右侧时,所述顺向为俯视视角的逆时针方向,所述逆向为俯视视角的顺时针方向。
82.其中,图2所示为第一刷具215清洗待洗车辆100前车牌110时,即位于第一段清洗轨迹时,第一刷具215顺向转动,即以俯视视角的顺时针方向转动。图3所示为第一刷具215清洗待洗车辆100左侧车头,即位于第二段清洗轨迹时,第一刷具215逆向转动,即以俯视视角的逆时针方向转动。图4所示为第一刷具215清洗待洗车辆100后视镜120,即位于第三段清洗轨迹时,第一刷具215顺向转动,即以俯视视角的顺时针方向转动。
83.步骤s106:当接收到的编码值等于第三预设编码值时,控制器判定刷具位于第三段清洗轨迹内并控制刷具顺向转动。
84.在一个实施例中,在第二段清洗轨迹之后,刷具的清洗轨迹还包括第三段清洗轨迹,第三段轨迹为刷具接触后视镜120时的清洗轨迹;第三段轨迹的起点对应于第三坐标;
85.控制器还用于:当接收到的编码值等于第三预设编码值时,判定刷具位于第三段清洗轨迹内并控制刷具顺向转动。其中,所述第三预设编码值用于指示所述待洗车辆100车头到达所述第三坐标。
86.其中,如图1所示,cd段为第三段清洗轨迹,其中c为第三段清洗轨迹起点,d为第三段清洗轨迹终点也是第四段清洗轨迹起点,第三段清洗轨迹是指刷具清洗后视镜120时的清洗轨迹。当刷具到达后视镜120时,控制器接收到的编码值等于第三预设编码值,控制刷具由逆向转动改为顺向转动。刷具变为顺向转动后,与后视镜120的延伸方向一致,所以不会缠绕后视镜120或打翻后视镜120。
87.步骤s108:当接收到的编码值等于第四预设编码值时,控制器判定刷具位于第四段清洗轨迹内并控制刷具逆向转动。
88.在一个实施例中,在第三段清洗轨迹之后,刷具的清洗轨迹还包括第四段清洗轨迹,第四段轨迹为刷具离开后视镜120后沿着车身的清洗轨迹;第四段轨迹的起点对应于第三坐标;
89.控制器还用于:当接收到的编码值等于第四预设编码值时,判定刷具位于第四段清洗轨迹内并控制刷具逆向转动。其中,所述第四预设编码值用于指示所述待洗车辆100车头到达所述第四坐标。
90.其中,如图1所示,de段为第四段清洗轨迹,其中d为第四段清洗轨迹起点,e为第四段清洗轨迹终点,第四段清洗轨迹是指刷具清洗完后视镜120后清洗侧面车身及车尾时的清洗轨迹。当刷具清洗完后视镜120后,控制器接收到的编码值等于第四预设编码值,控制刷具由顺向转动改为逆向转动。刷具变为逆向转动后,借助逆向转动与车身的反向摩擦力使刷具沿着第四段清洗轨迹清洗侧面车身和车尾,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。同时,由于逆向转动的刷毛在与车身接触时具有相同的运动方向,减少了刷具对车身运动的阻碍。
91.在一个实施例中,所述洗车机还包括横梁和气缸,所述支架转动连接于所述横梁上,所述气缸一端连接所述横梁,另一端连接所述支架;
92.所述控制器接收到的编码值等于第三预设编码值时,还控制所述气缸动作,所述气缸动作时驱动支架转动,以带动所述刷具朝接近车身的方向移动。
93.其中,如图5所示,控制器接收到的编码值等于第三预设编码值时,控制气缸驱动支架改变方向,当支架方向改变时,滑动连接在支架上的刷具也随之改变方向,但不改变转向。因此可以根据实际需要控制刷具与待洗车辆100的贴合程度。当刷具到达后视镜120时,控制器接收到的编码值等于第三预设编码值,控制刷具由逆向转动改为顺向转动,同时启动气缸,使气缸控制支架改变方向。以第一刷具215为例,如图2所示,由于第一刷具215滑动连接在支架上,第一刷具215受到待洗车辆100的推力,由h端向f端方向滑动,受到第一刷具215自身惯性的影响,当第一刷具215不再向f端方向滑动时,即到达待洗车辆100侧面时,与待洗车辆100距离较远,此时第一刷具215与待洗车辆100的贴合不够紧密,导致清洗效果不好。因此,当控制器接收到的编码值等于第三预设编码值,可以根据需要控制器启动气缸控制支架改变方向,以带动所述刷具朝接近车身的方向移动。使得刷具与待洗车辆100车身贴合程度高,清洗效果好。
94.此外,也可以设置一个第五预设编码值,第五预设编码值用于指示所述待洗车辆100车头到达第五坐标。当控制器接收到的编码值等于第五预设编码值时,控制气缸驱动支架改变方向。第五坐标对应于刷具到达第三段清洗轨迹内任一点,而不仅仅局限于第三段清洗轨迹的起点,可以根据需要自行设计。
95.在一个实施例中,所述第四段轨迹具体包括:
96.所述刷具离开所述后视镜后沿着车身清洗到车尾、再沿车尾清洗到后车牌;
97.当所述刷具位于第四段清洗轨迹内时,包括所述刷具清洗所述后车牌时,所述刷具逆向转动。
98.其中,第四段清洗轨迹包括后车牌,刷具位于第四段清洗轨迹内逆向转动,即刷具逆向清洗后车牌,刷具转动方向与后车牌的延伸方向相同,能避免刷毛快速转动时缠绕后车牌或打翻后车牌。
99.在一个实施例中,提供了一种洗车机,所述洗车机包括:控制器、传送装置、支架、刷具,所述传送装置用于传送待洗车辆100,所述刷具滑动连接于所述支架上,所述支架延伸的方向与所述待洗车辆100传送的方向形成的夹角α范围为:0
°
<α<90
°
;
100.所述刷具的清洗轨迹依次包括第一段清洗轨迹和第二段清洗轨迹,所述第一段清洗轨迹为所述刷具接触车牌时的清洗轨迹,所述第二段清洗轨迹为所述刷具离开车牌后沿着车身移动且未到达后视镜120时的轨迹。
101.所述控制器用于:
102.在所述刷具位于所述第一段清洗轨迹时,控制所述刷具顺向转动;
103.在所述刷具位于所述第二段清洗轨迹时,控制所述刷具逆向转动;
104.当所述刷具的清洗轨迹位于所述待洗车辆100传送的方向左侧时,所述顺向为俯视视角的顺时针方向,所述逆向为俯视视角的逆时针方向;当所述刷具的清洗轨迹位于所述待洗车辆100传送的方向右侧时,所述顺向为俯视视角的逆时针方向,所述逆向为俯视视角的顺时针方向。
105.与现有技术相比,本技术具有以下有益效果:
106.(1)在刷具位于第一段清洗轨迹时,控制刷具顺向转动,即在刷具接触车牌时,刷具顺向转动避免刷毛快速转动时缠绕车牌或打翻车牌。
107.(2)刷具滑动连接于所述支架上,支架延伸的方向与待洗车辆100传送的方向形成的夹角α范围为:0<α<90,使得刷具能够被向前传送的待洗车辆100推动沿着支架延伸的方向移动,无需主动驱动刷具动作的结构,使得刷具能够更紧密贴合车身,提升清洗效果。
108.(3)在刷具位于第二段清洗轨迹时,控制刷具逆向转动,逆向转动的刷毛在与车身接触时具有相同的运动方向,减少刷具对车身运动的阻碍。
109.(4)刷具滑动连接于支架上,支架延伸的方向与待洗车辆100传送的方向形成的夹角α范围为:0<α<90,并且在刷具位于第二段清洗轨迹时,控制刷具逆向转动。由于轨道相较于车辆传送的方向是倾斜的,并且刷具在贴合车身逆向转动时能够受到车身提供的反作用力,在无需主动驱动刷具动作的结构的情况下,合理设置轨道与车辆传送的方向倾斜的角度并根据该反作用力能够方便的调节刷具与车身贴合的程度,以适应不同车辆的清洗要求。
110.在一个实施例中,所述洗车机还包括:编码器,所述编码器与用于驱动所述传送装置的电机耦合,所述编码器用于向所述控制器输出编码值,所述编码值用于指示所述待洗车辆100车头的坐标;所述刷具的初始位置位于所述第一段轨迹的起点,所述第一段轨迹的起点对应于第一坐标;
111.所述在刷具位于第一段清洗轨迹时,控制刷具顺向转动,具体包括:
112.接收到的编码值等于第一预设编码值时,判定所述刷具位于第一段清洗轨迹内并控制所述刷具顺向转动;其中,所述第一预设编码值用于指示所述待洗车辆100车头到达所述第一坐标。
113.在一个实施例中,洗车机还包括:第一位置传感器230,所述第一位置传感器230用于检测所述刷具达到第二段清洗轨迹的起点;所述第二段轨迹的起点对应于第二坐标;
114.所述在所述刷具位于第二段清洗轨迹时,控制所述刷具逆向转动,具体包括:
115.所述控制器接收到的编码值等于第二预设编码值时,则判定所述刷具位于第二段
清洗轨迹内并控制所述刷具逆向转动;其中,所述第二预设编码值用于指示所述待洗车辆100车头到达所述第二坐标。
116.在一个实施例中,在第二段清洗轨迹之后,所述刷具的清洗轨迹还包括第三段清洗轨迹,所述第三段轨迹为所述刷具接触后视镜120时的清洗轨迹;所述第三段轨迹的起点对应于第三坐标;
117.所述控制器接收到的编码值等于第三预设编码值时,判定所述刷具位于第三段清洗轨迹内并控制所述刷具顺向转动;其中,所述第三预设编码值用于指示所述待洗车辆100车头到达所述第三坐标。
118.在一个实施例中,在第三段清洗轨迹之后,所述刷具的清洗轨迹还包括第四段清洗轨迹,所述第四段轨迹为所述刷具离开所述后视镜120后沿着车身的清洗轨迹;所述第四段轨迹的起点对应于第四坐标;
119.所述控制器接收到的编码值等于第四预设编码值时,判定所述刷具位于第四段清洗轨迹内并控制所述刷具逆向转动;其中,所述第四预设编码值用于指示所述待洗车辆100车头到达所述第四坐标。
120.在一个实施例中,所述洗车机还包括支撑架和气缸,所述支架转动连接于所述支撑架上,所述气缸一端连接所述支撑架,另一端连接所述支架;
121.所述控制器接收到的编码值等于第三预设编码值时,还控制所述气缸动作,所述气缸动作时驱动支架转动,以带动所述刷具朝接近车身的方向移动。
122.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
123.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。