技术特征:
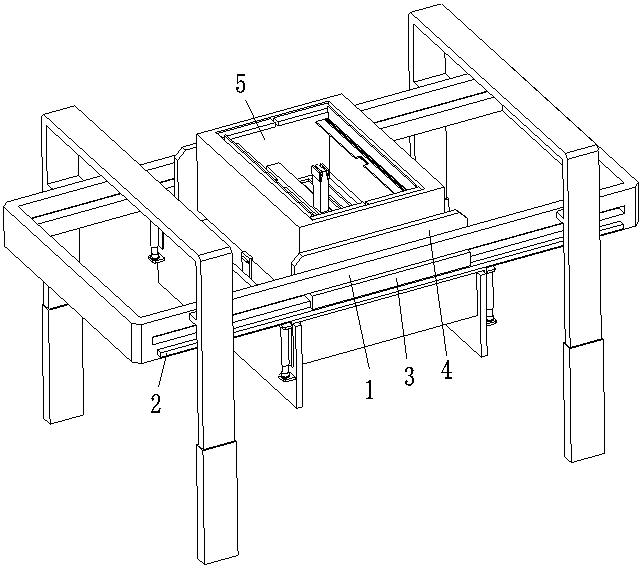
1.一种智能化定量装车机器人,包括框架(1)、电动滑块一(2)、滑动块(3)、u型架(4)、定量装车装置(5),其特征在于:框架(1)上安装有电动滑块一(2),电动滑块一(2)上设置有滑动块(3),滑动块(3)之间连接有u型架(4),u型架(4)的内部设置有定量装车装置(5);所述的u型架(4)包括架体(41)、振动机构(42)、卡接槽(43)、推动气缸(44)、推动块(45),滑动块(3)之间安装有架体(41),架体(41)上对称设置有振动机构(42),架体(41)上对称开设有卡接槽(43),卡接槽(43)的内部安装有推动气缸(44),推动气缸(44)的顶出端与推动块(45)连接;所述的定量装车装置(5)包括装载框(51)、摊平机构(52)、活动架(53)、顶撑弹簧(54)、锁定机构(55)、联动机构(56)、开合板(57)、转轴(58)、工字轮(59)、振动板(60),装载框(51)的左右两端对称安装有摊平机构(52),装载框(51)的外侧壁上安装有活动架(53),活动架(53)通过上下滑动配合的方式与u型架(4)连接,且活动架(53)的下端与u型架(4)之间连接有顶撑弹簧(54),活动架(53)的中部安装有锁定机构(55),装载框(51)的下端中部安装有联动机构(56),装载框(51)的下端对称开设有输送槽,输送槽内通过轴承与转轴(58)连接,转轴(58)上安装有开合板(57),转轴(58)的前端安装有工字轮(59),装载框(51)的底部设置有振动板(60),振动板(60)与装载框(51)之间为上下滑动配合连接;所述的联动机构(56)包括连接框(561)、驱动气缸(562)、垂直框(563)、电源一(564)、两个接触支链(565)、l型架(566)、齿条(567)、齿轮(568)、连接轮(569)、传送带(570)和导线一(571),连接框(561)安装在装载框(51)的底部,连接框(561)的内部安装有驱动气缸(562),连接框(561)的上端安装有垂直框(563),垂直框(563)的内侧壁安装有电源一(564),垂直框(563)上端的左右两端安装有两个接触支链(565),驱动气缸(562)的顶出端安装有l型架(566),l型架(566)的两侧壁上安装有齿条(567),齿条(567)与齿轮(568)相啮合,齿轮(568)通过销轴与装载框(51)连接,齿轮(568)的前端安装有连接轮(569),连接轮(569)与工字轮(59)之间连接有传送带(570),驱动气缸(562)、电源一(564)、接触支链(565)之间通过导线一(571)串联连接。2.根据权利要求1所述的一种智能化定量装车机器人,其特征在于:所述的框架(1)包括滑轨框(11)、升降龙骨架(12)、固定板(13)、拦截板(14)、升降气缸(15),升降龙骨架(12)之间安装有滑轨框(11),滑轨框(11)的前后两端对称安装有固定板(13),固定板(13)之间通过滑动配合的方式与拦截板(14)连接,且拦截板(14)为左右对称布置,拦截板(14)与固定板(13)之间连接有升降气缸(15);所述的滑轨框(11)与滑动块(3)之间为滑动配合连接,且电动滑块一(2)安装在滑轨框(11)的外侧壁上。3.根据权利要求1所述的一种智能化定量装车机器人,其特征在于:所述的振动机构(42)包括转动电机(421)、凸轮(422)、导线二(423)、电源二(424)、两个铜块一(425)、接触块(426)和内置弹簧(427),架体(41)上开设有内置槽,内置槽内通过底座安装有转动电机(421),转动电机(421)的输出轴上安装有凸轮(422),内置槽的下端安装有电源二(424),内置槽的上端安装有两个铜块一(425),两个铜块一(425)之间通过滑动配合的方式与接触块(426),接触块(426)与架体(41)之间连有内置弹簧(427),转动电机(421)、电源二(424)、两个铜块一(425)之间通过导线二(423)串联连接;所述的接触块(426)由绝缘块和导电块组成,绝缘块的上端安装有导电块,且初始位置
的绝缘块与两个铜块一(425)之间接触。4.根据权利要求1所述的一种智能化定量装车机器人,其特征在于:所述的摊平机构(52)包括两个电动滑块二(521)、两个驱动支链(522)、摊平架(523)、底板(524)、复位弹簧(525),装载框(51)的前后两内壁上各自安装有一个电动滑块二(521),电动滑块二(521)与驱动支链(522)连接,装载框(51)的左右两端对称开设有空腔,两个驱动支链(522)安装在空腔的前后两端,两个电动滑块二(521)之间设置有摊平架(523),摊平架(523)的下端通过滑动配合的方式与底板(524)连接,且底板(524)与摊平架(523)之间连接有复位弹簧(525)。5.根据权利要求4所述的一种智能化定量装车机器人,其特征在于:所述的驱动支链(522)包括导线三(5221)、电源三(5222)、两个铜块二(5223)和连接块(5224),内腔的侧壁上安装有电源三(5222),内腔的下端安装有两个铜块二(5223),两个铜块二(5223)之间通过滑动配合的方式与连接块(5224)连接,电动滑块二(521)、电源三(5222)、两个铜块二(5223)之间通过导线三(5221)串联连接。6.根据权利要求5所述的一种智能化定量装车机器人,其特征在于:所述的连接块(5224)的上半部分为绝缘部分,连接块(5224)的下半部分为导电部分,且初始位置的连接块(5224)与铜块二(5223)接触的部分为绝缘部分。7.根据权利要求4所述的一种智能化定量装车机器人,其特征在于:所述的摊平架(523)上开设有下漏槽,底板(524)上开设有对应槽,且初始位置的底板(524)上的对应槽与下漏槽之间为上下对应布置。8.根据权利要求1所述的一种智能化定量装车机器人,其特征在于:所述的锁定机构(55)包括锁定架(551)、连接弹簧(552),锁定架(551)与活动架(53)之间为左右滑动配合连接,且锁定架(551)与活动架(53)之间连接有连接弹簧(552)。9.根据权利要求1所述的一种智能化定量装车机器人,其特征在于:所述的接触支链(565)包括挤压架(5651)、防锈弹簧(5652)、两个铜块三(5653)、进出块(5654),挤压架(5651)与垂直框(563)之间为左右滑动配合连接,挤压架(5651)与垂直框(563)之间连接有防锈弹簧(5652),垂直框(563)的内壁上安装有两个铜块三(5653),两个铜块三(5653)之间为彼此分离的状态,挤压架(5651)的下端安装有进出块(5654)。10.根据权利要求9所述的一种智能化定量装车机器人,其特征在于:所述的进出块(5654)的中部为导电部分,进出块(5654)的左右两端为绝缘部分。
技术总结
本发明涉及一种智能化定量装车机器人,包括框架、电动滑块一、滑动块、U型架、定量装车装置,框架上安装有电动滑块一,电动滑块一上设置有滑动块,滑动块之间连接有U型架,U型架的内部设置有定量装车装置。本发明可以解决由于是抓斗随机抓煤,落煤量难以得到控制,使得煤炭的总装车量难以确定,容易出现超载或者少装的情况,传统的装车过程中,为了防止抓斗内的煤炭散在车厢外,抓斗的位置往往向车厢的中部上方靠拢,从而造成落煤位置过于集中在车厢的中部,而车厢边缘的煤炭厚度较薄,在后期车辆运输过程中,车速的过快以及路面的颠簸容易造成过于集中的煤炭撒在车厢外落在地面的情况。成过于集中的煤炭撒在车厢外落在地面的情况。成过于集中的煤炭撒在车厢外落在地面的情况。
技术研发人员:刘武庆 陈战备 刘佳杰 常成蕾
受保护的技术使用者:山西科通机械电子科技有限公司
技术研发日:2021.08.14
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。